一种光伏板清扫车及光伏板清洁装置的制作方法
1.本发明涉及工程车技术领域,尤其涉及一种光伏板清扫车及光伏板清洁装置。
背景技术:
2.随着光伏产业的不断壮大以及光伏产业的商业化,光伏电站在运营管理中的各种问题也开始突显,尤其是直接关系到发电效率的光伏组件的清洁问题。
3.对于大型光伏并网电站的运营,发电量是至关重要的指标之一,而影响发电量的因素除了逆变器、变压器、电缆等设备的损耗外,当属空气中灰尘对发电量的影响,严重的局部遮盖还会导致“热斑效应”。灰尘对光伏组件性能会产生负面影响,甚至光伏组件上的局部阴影也会引起输出功率的明显减少。根据美国国家航空航天局研究显示:每m2仅有4.05g的灰尘层就能减少太阳能转换40%,尤其是环境条件较差的北方地区,影响更加明显。
4.目前光伏电站清洗市场主要采用人工或者第三方团队进行清洗的模式,其清洗效率低,价格昂贵,耗水量高,极大的增加了光伏电站的运维成本。
技术实现要素:
5.本发明的目的是提供一种光伏板清扫车及光伏板清洁装置,该光伏板清扫车解决目前光伏发电站光伏组件清洗问题,代替传统人工清洗劳动量大、成本高、不能时时清洗的模式。
6.第一方面,本发明提供一种光伏板清洁装置,包括:用于对光伏板表面进行清洁的清扫机构、用于调节清扫机构作业高度的升降机构和用于保证清扫机构的倾斜角与光伏板表面相适配的倾角配平机构;所述升降机构与所述清扫机构转动连接,所述倾角配平机构分别与所述清扫机构和所述升降机构连接。进一步地,所述清扫机构包括壳体、滚刷和用于吸取所述滚刷上粉尘的吸尘系统;
7.所述滚刷的两端与所述壳体转动连接;
8.所述吸尘系统包括设于所述壳体顶部的若干吸尘管,所述吸尘管的一端管口正对所述滚刷。
9.进一步地,所述吸尘系统包括负压机和积尘仓,所述积尘仓的底壁与所述吸尘管远离所述滚刷一端的管口连通,所述积尘仓的顶壁与所述负压机的输出端连通。
10.进一步地,所述滚刷的两端分别设有用于定位光伏板的前后位置的红外传感器。
11.进一步地,所述升降机构包括:用于提供动力的驱动源、动力传递部、剪刀架和用于实时监测滚刷到光伏板垂直距离的高度传感器;
12.所述动力传递部的一端与所述驱动源连接,所述动力传递部的另一端与所述剪刀架连接;
13.所述剪刀架与所述清扫机构转动连接;
14.所述高度传感器设于所述清扫机构的壳体内,且高度传感器位于滚刷的正上方。
15.进一步地,所述倾角配平机构包括固定板、第一拉簧和第二拉簧;
16.所述固定板与剪刀架连接,所述固定板的左右两侧分别设有第一连接孔和第二连接孔;
17.所述第一拉簧的一端与所述第一连接孔连接,所述第一拉簧的另一端与所述清扫机构的壳体连接;
18.所述第二拉簧的一端与所述第二连接孔连接,所述第二拉簧的另一端与所述清扫机构的壳体连接;
19.所述升降机构与所述清扫机构的转动连接处位于所述第一拉簧与所述第二拉簧之间。
20.进一步地,本发明的光伏板清洁装置还包括用于实时监控拉力的拉力配重系统,所述拉力配重系统通过一安装板与所述升降机构连接。
21.另一当面,本发明还提供一种光伏板清扫车,包括车架和上述光伏板清洁装置,所述光伏板清洁装置与所述车架连接。
22.进一步地,本发明的光伏板清扫车包括用于实时对光伏板清扫车进行水平调整的水平调节机构,所述水平调节机构包括车轮、“v”型铰接架、液压油缸和倾角传感器;
23.所述v”型铰接架的一端与所述车轮连接,所述v”型铰接架的另一端与车体连接;
24.所述液压油缸的两端分别与所述v”型铰接架的两端连接;
25.所述倾角传感器设于所述车轮上。
26.进一步地,本发明的光伏板清扫车包括驾驶室和连杆机构,所述连杆机构分别与车体和所述驾驶室连接,所述连杆机构驱动所述驾驶室进行一百八十度旋转。
27.本发明的有益效果在于:
28.(1)本发明通过光伏板清洁装置对光伏板自动清洗,代替传统人工清洗劳动量大、成本高、不能时时清洗的模式,并且本发明配备了倾角配平机构,在遇到地面传导的震动或不平整的路面时,倾角配平机构可以实时保证清扫机构的倾斜角度与光伏板一致,这样可以防止光伏板受到清扫机构大作用力的挤压而被损坏,在一种优选方式中,通过左右设置的两个拉簧的弹力来抵消清扫机构受到来自的地面的作用力,保证清扫机构的稳定性。
29.(2)升降机构配备了用于实时监测滚刷到光伏板垂直距离的高度传感器,由于各光伏板高度不一,为了滚刷能够实时贴合光伏板,高度传感器实时检测滚刷距光伏板的距离反馈于控制系统控制驱动源通过动力传递部带动剪式升降机构实时调节滚刷的高度使其实时保持与光伏板贴合。
30.(3)通过在滚刷的两端分别设有用于定位光伏板的前后位置的红外传感器,可以检测清洗机构在光伏板的前后位置,防止跑偏。
31.(4)在进行高速清扫作业时,滚刷的重量会对光伏板造成冲击会对光伏面板造成隐裂,而拉力配重系统通过拉力传感器会实时对滚刷进行配重,使滚刷实时保持在稳定的作用压力范围,既能保证滚刷与光伏板接触不损伤光伏板又能保正高速清扫的洁净度。
32.(5)光伏板清扫车在行进的过程中,当遇到不用平整的路面时车体容易倾斜甚至侧翻,本发明通过在车轮上安装倾角传感器来实时感应车体的倾角,然后液压油缸控制“v”型铰接架的张开角度,这样可以实现对车体倾角进行配平从而实现整车的实时水平。
33.(6)本发明的光伏板清扫车由连杆机构连接于车体可实现一百八十度转向,即由
南向北或由北向南进行清扫光伏板时清扫车无需掉头,人工驾驶清扫车进行清扫作业时只需一键旋转驾驶室便可以实现两个方向的清扫工作。
附图说明
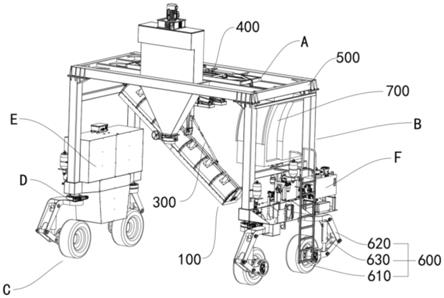
34.图1是本发明实施例的光伏板清扫车整体结构示意图。
35.图2是本发明实施例的光伏板清扫车整体结构后视图。
36.图3是本发明实施例的光伏板清扫车整体结构正视图。
37.图4是本发明实施例的光伏板清扫车整体结构俯视图。
38.图中,
39.100、清扫机构;110、壳体;120、滚刷;130、吸尘系统;131、吸尘管;132、负压机;133、积尘仓;
40.200、升降机构;210、剪刀架;
41.300、倾角配平机构;310、固定板;311、第一连接孔;312、第二连接孔;320、第一拉簧;330、第二拉簧;
42.400、拉力配重系统;
43.500、车架;
44.600、水平调节机构;610、车轮;620、“v”型铰接架;630、液压油缸;
45.700、驾驶室;
46.a、安装板;b、车体;c、行走装置;d、四轮独立转向系统;e、储能系统;f、液压动力系统。
具体实施方式
47.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明一种半导体激光器及其壳体结构进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
48.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“中心”、“纵向”、“横向”、“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
49.请参见图1和图2,在本发明所提供的具体实施方式中,光伏板清洁装置主要包括用于对光伏板表面进行清洁的清扫机构100、用于调节清扫机构100的作业高度的升降机构200和用于保证清扫机构100倾斜角与光伏板表面相适配的倾角配平机构300;其中,升降机构200与清扫机构100转动连接,倾角配平机构300分别与清扫机构100和升降机构200连接,本发明通过光伏板清洁装置对光伏板自动清洗,代替传统人工清洗劳动量大、成本高、不能时时清洗的模式,并且本发明配备了倾角配平机构300,在遇到地面传导的震动或不平整的路面时,倾角配平机构300可以实时保证清扫机构100的倾斜角度与光伏板一致,这样可以防止光伏板受到清扫机构100大作用力的挤压而被损坏。
50.请参见图3,具体地,清扫机构100包括壳体110、滚刷120和用于吸取滚刷120上粉尘的吸尘系统130;滚刷120的两端与壳体110转动连接,例如铰接或齿轮啮合连接等,吸尘系统130包括设于壳体110顶部的若干吸尘管131,吸尘管131的一端管口正对滚刷120,这样清扫完毕后灰尘会被粉尘吸尘系统130吸收,避免了清扫后的二次污染,更大化的清洁光伏板;在一种优选实施方式中,吸尘系统130包括负压机132和积尘仓133,积尘仓133的底壁与吸尘管131远离滚刷120一端的管口连通,积尘仓133的顶壁与负压机132的输出端连通,通过负压机132产生的负压将灰尘吸取到积尘仓133中,这样可以定时对积尘仓133进行拆卸清洗,方便后期维护。
51.需要提到的事,可以在滚刷120的两端分别设有用于定位光伏板的前后位置的红外传感器,本发明优选在滚刷120的两端分别设置六个红外传感器,这样可以检测清洗机构在光伏板的前后位置,防止跑偏。
52.请参见图3和图4,升降机构200主要包括用于提供动力的驱动源、动力传递部、剪刀架210和用于实时监测滚刷120到光伏板垂直距离的高度传感器220;驱动源210可以是气缸或油缸在此不做限定,本发明优选油缸,动力传递部220主要包括滑轮组和钢索,滑轮组用来省力,钢索的一端与驱动源210连接,钢索的另一端与所述剪刀架210连接;剪刀架210与清扫机构100转动连接,铰接或通过齿轮啮合连接等,在此不做限定,高度传感器220设于清扫机构100的壳体110内,且高度传感器220位于滚刷120的正上方,升降机构200配备了用于实时监测滚刷到光伏板垂直距离的高度传感器220,由于各光伏板高度不一,为了滚刷120能够实时贴合光伏板,高度传感器220实时检测滚刷120距光伏板的距离反馈于控制系统控制驱动源通过动力传递部220带动剪刀架210实时调节滚刷120的高度使其实时保持与光伏板贴合。
53.请参见图3,倾角配平机构300主要包括固定板310、第一拉簧320和第二拉簧330;固定板310与剪刀架210连接,固定板310的左右两侧分别设有第一连接孔311和第二连接孔312;第一拉簧320的一端与第一连接孔311连接,第一拉簧320的另一端与清扫机构100的壳体110连接;第二拉簧330的一端与第二连接孔312连接,第二拉簧330的另一端与清扫机构100的壳体110连接;升降机构200与清扫机构100转动连接处位于第一拉簧320与所述第二拉簧330之间,在遇到地面震动或凹凸不平的地面时,通过第一拉簧320与所述第二拉簧330的弹力来抵清扫机构100受到来自的地面的作用力,保证清扫机构100的稳定性,并且防止清扫机构100对光伏板造成损坏。
54.请参见图3,在一种实施方式中,本发明的光伏板清洁装置还包括用于实时监控拉力的拉力配重系统400,拉力配重系统400通过一安装板a与升降机构200连接,具体地,该拉力配重系统400由拉力传感器、油缸、滑轮组、钢索、剪刀架等组成,由于清扫机构100整套结构超过100kg,在进行高速清扫作业时,滚刷120的重量会对光伏板造成冲击会对光伏板造成隐裂,而拉力配重系统400通过拉力传感器实时会实时对滚刷进行配重,使滚刷实时保持15kg左右既能保证滚刷与光伏板接触不损伤光伏板又能保正高速清扫的洁净度。
55.需要提到的是,本发明的光伏板清洁装置上还可以安装侧面防撞检测系统,具体地,该侧面防撞检测系统主要由上下各二套超声波协达系统组成,用于检测清洗机构到光伏板的间距,系统提前自动调节位置,防止距离太近发生碰撞,其中一套超声波协达系统装在滚刷120上,另外一套超声波协达系统装在光伏板上。
56.另外,请参见图1-图2,本发明还提供一种光伏清扫车,该光伏清扫车包括车架500和上述光伏板清洁装置,光伏板清洁装置与车架500连接,可以是固定连接也可以是可拆卸连接,在此不做限定,在本发明一种优选实施例中,在车架500设置一个安装孔,光伏板清洁装置设置在一安装板a上,安装板a在安装孔处与车架500抵接。
57.请参见图1,在一种实施方式中,光伏清扫车包括用于实时对光伏清扫车进行水平调整的水平调节机构600,水平调节机构600包括车轮610、“v”型铰接架620、液压油缸630和倾角传感器;v”型铰接架620的一端与车轮610连接,v”型铰接架620的另一端与车体b连接,液压油缸630的两端分别与“v”型铰接架620的两端连接,倾角传感器设于所述车轮610上,光伏板清扫车在行进的过程中,当遇到不用平整的路面时车体容易倾斜甚至侧翻,本发明通过在车轮610上安装倾角传感器来实时感应车体的倾角,然后液压油缸630控制“v”型铰接架620的张开角度,这样可以实现对车体倾角进行配平从而实现整车的实时水平。
58.请参见图1,在一种实施方式中,光伏清扫车包括驾驶室700和连杆机构,连杆机构分别与车体b和驾驶室700连接,连杆机构驱动驾驶室700进行一百八十度旋转,即由南向北或由北向南进行清扫光伏板时清扫车无需掉头,人工驾驶清扫车进行清扫作业时只需一键旋转驾驶室便可以实现两个方向的清扫工作。
59.请参见图1,需要提到的是,本发明的光伏清扫车还包括行走装置c、四轮独立转向系统d、储能系统e、整车控制系统、液压动力系统f和跨越式的车架500等。
60.具体地,行走装置c由四个独立液压马达驱动越野橡胶轮实现整车适应戈壁、沙漠等原始地貌的正常行驶。
61.四轮独立转向系统d由四个独立涡轮盘进行转向可实现整车转向、原地一百八十度掉头、任意方向平移,使得车辆更加灵活更能适应狭小复杂等地形的转场、转向。
62.储能系统e因光伏电站大多地处高原原始地貌,秋季枯草较多且干燥易燃,整车采用磷酸铁锂电池作为能量系统,电池容量350kwh,磷酸铁锂性能稳定不易自燃,电站补充电力方便,对环境影响较小。
63.整车控制系统由人工操控及rtk-gps自动驾驶两套程序组成,即可人工驾驶清扫车进行清扫工作也可无人驾驶进行全自动清扫工作。
64.液压动力系统f由电能驱动电机再驱动液压泵实现整车动力驱动,液压系统具有耐候性强更能适应各类恶劣环境,保证清洗车在各类恶劣环境中稳定安全的工作。
65.跨越式清扫车的车架500采用跨越式结构,整车跨越在光伏板之上使得清扫滚刷能稳定的贴合光伏板面上从而保证清洗的洁净度。
66.综上,本发明的光伏清扫车具有以下优点:
67.(1)清扫毛刷在液压马达的带动下,清扫毛刷自旋转对光伏组件进行清扫,清扫完毕后灰尘会被粉尘吸取系统吸收到粉尘收集箱,避免了清扫后的二次污染,更大化的清洁光伏板。
68.(2)跨越式清洗,相较于侧方悬臂清洗,在先天结构上更具有稳定优势,从而保证清扫效率及清扫效果。
69.(3)相较于其他的清扫方式,采用无水加集尘清扫方式,无需浪费水资源且比传统只刷不吸的方式清扫洁净度更有保障。
70.(4)本发明的光伏板清洁装置实现光伏清洗车的自适应清扫,即可人工驾驶清扫
车作业也可无人驾驶进行清扫作业。
71.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1