一种级联型混合直流低频振荡控制方法、系统和计算设备与流程
1.本发明涉及一种级联型混合直流低频振荡控制方法、系统和计算设备,属于高压直流输电混合直流技术领域。
背景技术:
2.级联型混合直流系统结合了常规直流输电系统和柔性直流输电系统的优点,是直流输电技术的重要发展方向。受端级联型混合直流的整流站由2组12脉动lcc串联构成,逆变站由1组12脉动换相换流器(lcc)和电压源换流器(vsc)并联组串联构成,并将低端vsc扩展为多个vsc并联并落点于不同区域电网,形成了多端系统,赋予了多个vsc逆变站功率分配的能力。
3.低频振荡实际上是一种出现在互联电力系统联络线上的功率动态振荡,其频率约在0.1~2.5hz范围内。电网中大量使用的快速励磁装置,使系统产生负阻尼并抵消原有的正阻尼,从而导致系统总阻尼变得很小甚至为负。在负阻尼情况下出现的扰动会被逐步放大,最后表现为发电机功率和功角发生改变。严重时还会造成系统失去稳定甚至解列。
4.现有技术中利用vsc-hvdc系统功率调制对电网低频振荡进行抑制,未充分利用混合直流的快速可控性,仅适用于交流电网。现有技术中通过设计广域电力系统稳定器对电网低频振荡进行抑制,具有无法应用于级联型混合直流系统的缺点。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种级联型混合直流低频振荡控制方法、系统和计算设备,能够抑制交流系统低频振荡,保证电力系统稳定。为达到上述目的,本发明是采用下述技术方案实现的:
6.第一方面,本发明提供了一种级联型混合直流低频振荡控制方法,所述方法包括:
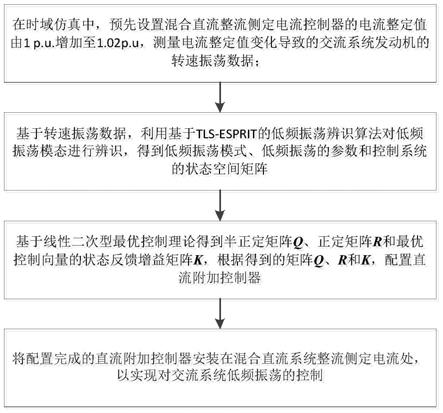
7.在时域仿真中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据;
8.基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到辨识结果;
9.根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器;
10.将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制。
11.结合第一方面,进一步地,所述时域仿真采用混合直流pscad仿真模型。
12.结合第一方面,进一步地,通过混合直流pscad仿真模型的数据测量单元采集交流系统发电机在扰动前后的转速振荡数据。
13.结合第一方面,进一步地,所述基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,包括:
14.将转速振荡数据写为频率与阻尼系数的形式;
15.将测量得到的转速振荡数据写为hankel数据矩阵xh;
16.对数据矩阵xh进行奇异值分解并整理,得到控制系统的状态空间矩阵;
17.根据转速振荡数据,得到振荡模态c;
18.基于振荡模态c,得到低频振荡的参数,包括幅值、初始相位、角频率及衰减因子。
19.结合第一方面,优选地,将转速振荡数据写为频率与阻尼系数的形式,通过下式表示:
[0020][0021]
式(1)中,x(n)为转速振荡数据,ts为采样周期,p为信号中正弦分量数的2倍,ai、φi、ωi和σi分别为第i个衰减分量的幅值、初始相位、角频率及衰减因子,j为虚数单位,c
p
为第p个振荡模态,z
pn
为信号极点,w为均值为0的白噪声。
[0022]
结合第一方面,优选地,将测量得到的转速振荡数据写为hankel数据矩阵xh,通过下式表示:
[0023][0024]
式(2)中,m为hankel矩阵的行数,l为hankel矩阵的行数,矩阵满足l》p,且m》p,l+m-1=n的关系。
[0025]
结合第一方面,优选地,对数据矩阵xh进行奇异值分解并整理,包括:
[0026]
对数据矩阵xh进行奇异值分解,得到信号子空间vs与噪声子空间vn,通过下式表示:
[0027][0028]
式(3)中,svd表示奇异值分解,h表示共轭转置,u和v为正交矩阵,σ为奇异值矩阵;
[0029]
除去vs首行得到矩阵v1,除去末行得到矩阵v2;忽略噪声和干扰并考虑误差e,存在满足以下条件的可逆矩阵ψ:
[0030]v2
+e2=(v1+e1)ψ
ꢀꢀꢀ
(4)
[0031]
使用奇异值将正交矩阵v分解为4个p
×
p的矩阵得到,表示为:
[0032][0033]
ψ
op
=-v
′
12v′
21-1
ꢀꢀꢀ
(6)
[0034]
式(5)中,v’为分解后的正交矩阵;
[0035]
式(6)中,ψ
op
为分解后正交矩阵的可逆矩阵,求解ψ
op
的特征值λ
p
(p=1,2,3,
…
p);
[0036]
通过式(5)和(6),得到使总体误差∥e1,e2∥最小的数据矩阵xh的最优解。
[0037]
结合第一方面,优选地,还包括:
[0038]
结合第一方面,优选地,奇异值矩阵σ的对角元素di为hankel矩阵的第i个奇异值。
[0039]
结合第一方面,优选地,根据转速振荡数据,得到振荡模态c,包括:
[0040]
考察测量到的转速振荡数据,低频振荡的模态,通过下式计算:
[0041]
c=[c
1 c2ꢀ…ꢀcp
]
t
=(λhλ)-1
λhy
ꢀꢀꢀ
(7)
[0042]
式(7)中,c为低频振荡的模态,p为第p个振荡模态,λ为特征值,y为采样的信号;
[0043]
通过最小二乘法求得幅值和初始相角信息,对n点采样信号,有
[0044]
y=λc=[x(0) x(1) ... x(n-1)]
t
ꢀꢀꢀ
(8)
[0045]
低频振荡的参数包括幅值、初始相位、角频率及衰减因子,分别通过下式计算:
[0046]ai
=2|ci|
[0047]
θi=argci[0048][0049]
式(9)中,ai为转速振荡数据中第i个分量的幅值,θi为转速振荡数据中第i个分量的初始相位,ωk为角频率,σk为衰减因子。
[0050]
结合第一方面,进一步地,所述得到最优控制向量的状态反馈增益矩阵k,包括:
[0051]
根据状态空间模型和低频振荡模式辨识结果,基于线性二次型最优控制理论,使用matlab语句k1=lqr(a,b,q1,r1),得到状态反馈增益矩阵k。
[0052]
结合第一方面,进一步地,所述得到半正定矩阵q、正定矩阵r,包括:
[0053]
基于线性二次型最优控制理论,根据经验值,设置半正定矩阵q为对角元素等于1、其他元素等于0的矩阵,设置正定矩阵r为1.0。
[0054]
结合第一方面,进一步地,所述配置直流附加控制器,包括:
[0055]
根据被控系统的状态方程和状态反馈增益矩阵k,通过阿克曼公式求得使被控系统稳定所需的状态反馈增益矩阵ke,所述状态反馈增益矩阵ke即为直流附加控制器。
[0056]
结合第一方面,优选地,求得使被控系统稳定所需的状态反馈增益矩阵ke,通过下式计算:
[0057][0058]
式(10)中,k*为被控系统的对偶系统的状态反馈增益矩阵;a为被控系统的状态矩阵,c为被控系统的控制矩阵,φ(a)为状态矩阵的组合,通过下式计算:
[0059]
φ(a)=an+α1a
n-1
+
…
+α
n-1
a+α
niꢀꢀꢀ
(11)
[0060]
式(11)中,α1,
……
,αn为相关系数,i为单位矩阵。
[0061]
第二方面,本发明提供了一种级联型混合直流低频振荡控制系统,包括:
[0062]
测量模块:用于在时域仿真中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据;
[0063]
辨识模块:用于基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到低频振荡模式、低频振荡的参数和控制系统的状态空间矩阵;
[0064]
配置模块:用于根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器;
[0065]
控制模块:用于将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制。
[0066]
第三方面,本发明提供了一种计算设备,其特征在于,包括处理器及存储介质;
[0067]
所述存储介质用于存储指令;
[0068]
所述处理器用于根据所述指令进行操作以执行第一方面所述方法的步骤。
[0069]
第四方面,本发明提供了计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现第一方面所述方法的步骤。
[0070]
与现有技术相比,本发明实施例所提供的一种级联型混合直流低频振荡控制方法、系统和计算设备所达到的有益效果包括:
[0071]
本发明在时域仿真中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据;本发明基于时域仿真,充分利用级联型混合直流系统快速可控的技术优势,具有易实现的优点;
[0072]
本发明基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到低频振荡模式、低频振荡的参数和控制系统的状态空间矩阵;根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器;将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制;本发明能够应用于级联型混合直流系统,能够抑制交流系统低频振荡,保证电力系统稳定,具体应用范围广、适用性强的优点。
附图说明
[0073]
图1是本发明实施例一提供的一种级联型混合直流低频振荡最优控制方法的流程图;
[0074]
图2是本发明实施例一提供的一种级联型混合直流低频振荡最优控制方法得到的基于线性二次型最优控制的观测-状态反馈控制系统;
[0075]
图3是本发明实施例二提供的级联型混合直流系统的示意图;
[0076]
图4是本发明实施例二提供的低频振荡仿真结果。
具体实施方式
[0077]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0078]
实施例一:
[0079]
如图1,本发明实施例提供了一种级联型混合直流低频振荡控制方法,包括:
[0080]
在时域仿真中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据;
[0081]
基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到低频振荡模式、低频振荡的参数和控制系统的状态空间矩阵;
[0082]
根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器;
[0083]
将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制。
[0084]
需要说明的是,时域仿真采用混合直流pscad仿真模型。
[0085]
具体步骤包括:
[0086]
步骤1:在混合直流pscad仿真模型中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据。
[0087]
具体的,通过混合直流pscad仿真模型的数据测量单元采集交流系统发电机在扰动前后的转速振荡数据。
[0088]
步骤2:基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到低频振荡模式、低频振荡的参数和控制系统的状态空间矩阵。
[0089]
步骤2.1:将转速振荡数据写为频率与阻尼系数的形式,通过下式表示:
[0090][0091]
式(1)中,x(n)为转速振荡数据,ts为采样周期,p为信号中正弦分量数的2倍,ai、φi、ωi和σi分别为第i个衰减分量的幅值、初始相位、角频率及衰减因子,j为虚数单位,c
p
为第p个振荡模态,z
pn
为信号极点,w为均值为0的白噪声。
[0092]
步骤2.2:将测量得到的转速振荡数据写为hankel数据矩阵xh,通过下式表示:
[0093][0094]
式(2)中,m为hankel矩阵的行数,l为hankel矩阵的行数,矩阵满足l》p,且m》p,l+m-1=n的关系。
[0095]
步骤2.3:对数据矩阵xh进行奇异值分解并整理,包括:
[0096]
对数据矩阵xh进行奇异值分解,得到信号子空间vs与噪声子空间vn,通过下式表示:
[0097][0098]
式(3)中,svd表示奇异值分解,h表示共轭转置,u和v为正交矩阵,σ为奇异值矩
阵,奇异值矩阵σ的对角元素di为hankel矩阵的第i个奇异值。
[0099]
除去vs首行得到矩阵v1,除去末行得到矩阵v2;忽略噪声和干扰并考虑误差e,存在满足以下条件的可逆矩阵ψ:
[0100]v2
+e2=(v1+e1)ψ
ꢀꢀꢀ
(4)
[0101]
使用奇异值将正交矩阵v分解为4个p
×
p的矩阵得到,表示为:
[0102][0103]
ψ
op
=-v
′
12v′
21-1
ꢀꢀꢀ
(6)
[0104]
式(5)中,v’为分解后的正交矩阵;
[0105]
式(6)中,ψ
op
为分解后正交矩阵的可逆矩阵;求解ψ
op
的特征值λ
p
(p=1,2,3,
…
p);
[0106]
通过式(5)和(6),得到使总体误差∥e1,e2∥最小的数据矩阵xh的最优解。
[0107]
步骤2.4:根据转速振荡数据,得到振荡模态c,通过下式表示:
[0108]
c=[c
1 c2ꢀ…ꢀcp
]
t
=(λhλ)-1
λhy
ꢀꢀꢀ
(7)
[0109]
式(7)中,c为低频振荡的模态,p为第p个振荡模态,λ为特征值,y为采样的信号;
[0110]
通过最小二乘法求得幅值和初始相角信息,对n点采样信号,有
[0111]
y=λc=[x(0) x(1) ... x(n-1)]
t
ꢀꢀꢀ
(8)。
[0112]
步骤2.5:基于振荡模态c,得到低频振荡的参数,包括幅值、初始相位、角频率及衰减因子,分别通过下式计算:
[0113]ai
=2|ci|
[0114]
θi=argci[0115][0116]
式(9)中,ai为转速振荡数据中第i个分量的幅值,θi为转速振荡数据中第i个分量的初始相位,ωk为角频率,σk为衰减因子。
[0117]
步骤3:根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器。
[0118]
步骤3.1:根据状态空间模型和低频振荡模式辨识结果,基于线性二次型最优控制理论,使用matlab语句k1=lqr(a,b,q1,r1),得到状态反馈增益矩阵k。
[0119]
步骤3.2:基于线性二次型最优控制理论,根据经验值,设置半正定矩阵q为对角元素等于1、其他元素等于0的矩阵,设置正定矩阵r为1.0,得到半正定矩阵q、正定矩阵r。
[0120]
步骤3.3:配置直流附加控制器,包括:
[0121]
根据被控系统的状态方程和状态反馈增益矩阵k,通过阿克曼公式求得使被控系统稳定所需的状态反馈增益矩阵ke,所述状态反馈增益矩阵ke即为直流附加控制器。
[0122]
具体的,考虑被控系统具有状态方程
[0123][0124]
式(10)中:x为状态向量,y为输出向量,u为控制向量,a、b及c分别状态矩阵、输出矩阵及控制矩阵。
[0125]
在设计所需的状态反馈增益矩阵ke时,通过求解其对偶问题进行求解,即解对偶系统的极点配置问题。
[0126][0127]
式(11)中:z为状态向量,n为输出向量,v为控制向量,a*、b*及c*分别状态矩阵、输出矩阵及控制矩阵。
[0128]
假设控制信号v=-kz,如果对偶系统是状态完全可控的,确定状态反馈增益矩阵k,使得矩阵a*-c*k得到一组所期望的特征值。
[0129]
如果u1,u2,
…
,un是所期望的状态观测器的矩阵特征值,则通过取相同的ui作为对偶系统的状态反馈增益矩阵的期望特征值,可得
[0130]
|si-(a
*-c
*
k)|=(s-u1)
×
(s-u2)
×
l
×
(s-un)
ꢀꢀꢀ
(12)
[0131]
注意到a
*-c
*
k和a-k
*
c的特征值相同,可得
[0132]
|si-(a
*-c
*
k)|=|si-(a-k
*
c)|
ꢀꢀꢀ
(13)
[0133]
比较特征对象式|si-(a-k
*
c)|和观测器系统的特征多项式|si-(a-kec)|,可找出ke和k
*
的关系为:ke=k
*
。因此,原系统所需的状态反馈增益矩阵keke可通过关系式ke=k
*
确定,则所需状态反馈增益矩阵ke可通过阿克曼公式求得:
[0134][0135]
式(14)中:k*为被控系统的对偶系统的状态反馈增益矩阵;a为被控系统的状态矩阵,c为被控系统的控制矩阵,φ(a)为状态矩阵的组合,通过下式计算:
[0136]
φ(a)=an+α1a
n-1
+
…
+α
n-1
a+α
niꢀꢀꢀ
(15)
[0137]
式(15)中,α1,
……
,αn为相关系数,i为单位矩阵。
[0138]
步骤4:将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制。
[0139]
将配置完成的直流附加控制器通过传递函数的形式在pscad实现,安装在混合直流整流侧控制系统中定电流控制模块中,形成的基于线性二次型最优控制的观测-状态反馈控制系统,如图2所示。
[0140]
实施例二:
[0141]
以如图3所示级联型混合直流系统为例进行计算并验证。
[0142]
设置t=3s时混合直流系统整流侧施加0.02p.u.的小扰动,加入所设计的直流附加控制器前后的交流系统功率振荡结果如图4所示。
[0143]
由图4得到,在混合直流系统整流侧加入直流附加控制器后,能够有效提升系统的
阻尼水平,从而抑制交流系统低频振荡,证明本发明的有效性。
[0144]
实施例三:
[0145]
本发明实施例提供了一种级联型混合直流低频振荡控制系统,包括:
[0146]
测量模块:用于在时域仿真中,预先设置混合直流整流侧定电流控制器的电流整定值由1p.u.增加至1.02p.u,测量电流整定值变化导致的交流系统发动机的转速振荡数据;
[0147]
辨识模块:用于基于转速振荡数据,利用基于tls-esprit的低频振荡辨识算法对低频振荡模态进行辨识,得到低频振荡模式、低频振荡的参数和控制系统的状态空间矩阵;
[0148]
配置模块:用于根据辨识结果,基于线性二次型最优控制理论得到半正定矩阵q、正定矩阵r和最优控制向量的状态反馈增益矩阵k,根据得到的矩阵q、r和k,配置直流附加控制器;
[0149]
控制模块:用于将配置完成的直流附加控制器安装在混合直流系统整流侧定电流处,以实现对交流系统低频振荡的控制。
[0150]
实施例四:
[0151]
本发明实施例提供了一种计算设备,包括处理器及存储介质;
[0152]
所述存储介质用于存储指令;
[0153]
所述处理器用于根据所述指令进行操作以执行实施例一所述方法的步骤。
[0154]
实施例五:
[0155]
本发明实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现实施例一所述方法的步骤。
[0156]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0157]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0158]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0159]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0160]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1