一种双轴多稳态波浪振动能量收集装置
1.本发明涉及振动能量收集技术领域,尤其涉及一种将波浪振动转化为电能的双轴多稳态振动能量收集装置。
背景技术:
2.随着海洋经济的发展,海洋机器人越来越活跃于对未知海域的探索。目前海洋机器人作业时间受所携带电池容量的限制,不能满足机器人长时间持续作业的需求。当前已有研究者设计并制造波浪能振动能量收集装置,主要分为两类:压电式和电磁式。其中,压电式振动能量收集装置是通过受外界振动影响产生应力应变时,利用压电材料的正压电效应产生电能;但是目前的压电能量收集装置存在输出电压非线性,能量效率低、输出功率低的问题,仅能实现对传感器供能。而电磁式振动能量收集装置,是利用法拉第电磁感应定律发电;目前,基于惯性摆的电磁式振动能量收集装置往往具有较窄的工作频带和单一振动方向,环境适应性较差。
3.中国专利公开号cn 111396237 a公开了一种基于惯性摆的球形水下机器人波浪能捕获系统及方法,该装置主要由球状壳体、惯性摆、推进器、发电机和锚定绳索组成;这种能量捕获系统,可以与球形机器人结构密切结合,能够利用机器人自身的惯性摆和发电装置,实现波浪能捕获。现有的一种可调谐振动能量收集装置(中国专利公开号cn 108155774 b),该装置采用摆杆式结构,通过改变弹簧与固定铰支座的距离,可以改变装置的固有频率,具有可调谐以及调谐线性度好,结构简单,输出功率密度大等特点。但是以上所述的两种装置均采用横向单轴式布局,该结构使惯性摆只能在单个方向上发生转动,因此只能实现单向的振动能量收集。然而在实际的应用环境中,海波的振动激励是多方向的,该结构对振动方向的适应性较差。
4.而现有的一种多自由度可调的摆式发电系统(中国专利公开号cn 110454318 b),该装置包括浮能整流模块、储能控制模块和自由度调节模块,能够俘获波浪的往复作用力,并做多个自由度的摆动,能够提升能量转化效率;但是该装置尺寸较大,结构较为复杂,不适用于海洋机器人平台搭载。
5.总而言之,无论压电式还是电磁式,电能转换率都与装置的振动方向适应性和共振频率有关。当装置固有频率与共振频率一致时,电能转换率最高;当外界频率偏离装置固有频率时,电能转换率大幅下降。因此,针对波浪振动频率低且频带宽,振动幅值、频率和方向的随机性大的特点,需要一种能够对振动方向和振动频率适应性较好的装置,提高能量收集的效率。
技术实现要素:
6.本发明针对现有技术的不足,设计了一种双轴多稳态波浪振动能量收集装置。一方面,通过十字双轴式布局,能够捕获多个方向的振动激励,对波浪振动方向的适应性较好;另一方面,通过多稳态机构,拓宽了装置的频率工作范围,增强了对波浪振动频率的适
应性,以改善并丰富适用于海洋机器人搭载的波浪能发电装置。
7.本发明解决技术问题所采取的技术方案为:本发明包括惯性摆机构和多稳态机构,所述惯性摆机构包括惯性摆球,所述摆球下方嵌有第一圆柱形永磁体,摆球上方与摆杆相连。
8.所述摆杆上方开有第二轴孔,与第二转轴相连;所述第二转轴悬架于第二耳扣,第二转轴两端分别与第三减速电机、第四减速电机的轴相连;所述第三减速电机和第四减速电机分别位于第二耳扣两侧。
9.所述第二耳扣上方开有第一轴孔,与第一转轴相连;所述第一转轴悬架于第一耳扣,第一转轴两端与第一减速电机、第二减速电机的轴相连;所述第一减速电机、第二减速电机分别位于第一耳扣两侧。
10.所述惯性摆机构采用十字双轴式布局,能够适应多个方向的振动激励。
11.所述多稳态机构包括磁铁托盘,所述磁铁托盘的中心嵌有第二圆柱形永磁体;所述磁铁托盘的边缘嵌有环形永磁体。
12.所述磁铁托盘安装于惯性摆机构的正下方。
13.所述磁铁托盘和摆球下方的永磁体组成多稳态机构,能够拓宽装置的频率工作范围,增强对波浪振动频率的适应性。
14.进一步说,所述第一圆柱形永磁体上方s极、下方n极放置;所述第二圆柱形永磁体上方n极、下方s极放置;所述环形永磁体上方s极、下方n极放置。
15.进一步说,所述摆杆上方的第二轴孔上有键槽,通过第二平键与第二转轴相连。
16.进一步说,所述第三减速电机、第四减速电机通过对应的第二电机支架分别固定于第二耳扣两侧。
17.进一步说,所述第二耳扣上方的第一轴孔上有键槽,通过第一平键与第一转轴相连。
18.进一步说,所述第一减速电机、第二减速电机通过对应的第一电机支架分别固定于第一耳扣两侧。
19.本发明与背景技术相比,具有有益的效果是:本发明的装置采用十字双轴式布局,能够捕获多个方向的振动激励,对波浪振动方向的适应性较好;同时,通过多稳态机构,拓宽了装置的频率工作范围,增强了对波浪振动频率的适应性;此外,该装置整体结构稳定,形状对称,泛用性好,可以安装在任何振动装置中进行发电。
附图说明
20.下面结合附图对本发明的具体实施方式做进一步详细说明。
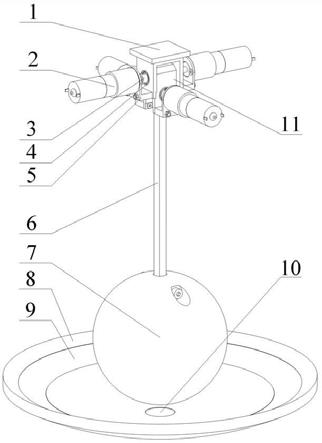
21.图1是本发明的双轴多稳态波浪振动能量收集装置的斜视图。
22.图2是本发明装置的正面半剖视图。
23.图3是本发明装置的侧面半剖视图。
24.图中:1、第一耳扣,2、减速电机,3、第一转轴,4、轴承,5、电机支架,6、摆杆,7、摆球,8、磁铁托盘,9、第一永磁体,10、第二永磁体,11、第二耳扣,12、第三永磁体,13、第二转轴。
具体实施方式
25.本发明提供了一种双轴多稳态波浪振动能量收集装置。该装置包括惯性摆机构和多稳态机构。惯性摆机构包括摆球,摆球的下方嵌有圆柱形永磁体;圆柱形永磁体上方s极,下方n极放置;摆球的中心开有十字孔洞,竖直方向孔洞用于插入摆杆,水平方向孔洞用于插入螺栓将摆球与摆杆固定;摆杆上方开有轴孔和键槽,通过平键将摆杆和第二转轴相连;第二转轴通过轴承悬架于第二耳扣,转轴的两端掏空通过键槽和紧定螺钉与减速电机的轴相连,减速电机通过电机支架分别固定于第二耳扣两侧;第二耳扣上方开有轴孔和键槽,通过平键与第一转轴相连;第一转轴通过轴承悬架于第一耳扣,转轴的两端掏空通过键槽和紧定螺钉与减速电机的轴相连,减速电机通过电机支架分别固定于第一耳扣两侧;第一耳扣上方留有凸槽,用于固定装个装置;所述惯性摆机构采用十字双轴式布局,能够适应多个方向的振动激励。
26.所述多稳态机构包括磁铁托盘,磁铁托盘安装于惯性摆机构正下方;所述磁铁托盘的中心嵌有圆柱形永磁体,所述圆柱形永磁体上方n极,下方s极放置;所述磁铁托盘的边缘嵌有环形永磁体,所述环形永磁体上方s极,下方n极放置;磁铁托盘和惯性摆球下方的永磁体组成了多稳态机构,能够拓宽装置的频率工作范围,增强对波浪振动频率的适应性。
27.本发明装置整体结构稳定,形状对称,泛用性好,可以安装在任何振动装置中进行发电。
28.实施例:图1~图3给出了一种双轴多稳态波浪振动能量收集装置。
29.实施例中的装置包括惯性摆机构和多稳态机构。
30.惯性摆机构包括了摆球7,中心开有十字孔洞;摆球7下方开有凹槽嵌有第三永磁体12(即第一圆柱形永磁体),第三永磁体12上方s极,下方n极放置;摆球7上方通过螺栓与摆杆6相连;摆杆6上端开有轴孔和键槽,通过平键与第二转轴13相连接;第二转轴13通过轴承4悬架于第二耳扣11,第二转轴13的两端掏空通过键槽和紧定螺钉与减速电机2的轴相连;减速电机2通过螺钉与电机支架5相连,电机支架5通过螺栓固定在第二耳扣11的两侧;第二耳扣11上方开有轴孔和键槽,通过平键与第一转轴3相连;第一转轴3通过轴承4悬架于第一耳扣1,第一转轴3的两端掏空通过键槽和紧定螺钉与减速电机2的轴相连;减速电机2通过螺钉与电机支架5相连,电机支架5通过螺栓固定在第一耳扣1的两侧;第一耳扣1上方留有凸槽,用于固定装个装置。
31.多稳态机构包括了磁铁托盘8,磁铁托盘8的中心嵌有第二永磁体10(即第二圆柱形永磁体);第二永磁体10上方n极,下方s极放置;磁铁托盘8的边缘嵌有环形第一永磁体9(即环形永磁体),第一永磁体9上方s极,下方n极放置;磁铁托盘8和摆球7下方的第三永磁体12组成多稳态机构。
32.本发明的工作原理如下:将该装置安装在海洋机器人的舱体内,惯性摆机构通过第一耳扣1上方的凸槽悬吊于海洋机器人舱体中,磁铁托盘8置于惯性摆机构的正下方,并固定在海洋机器人舱体内壁。摆球7通过摆杆6和第一转轴3与第二转轴13组成了十字双轴惯性摆结构,带动减速电机2的主轴转动。
33.在运动过程中,安装有双轴多稳态波浪振动能量收集装置的海洋机器人在海波的
激励下进行无规律晃动,带动第一耳扣1和磁铁托盘8一起运动,而摆球7由于惯性的存在,带动第一转轴3和第二转轴13做往复转动;而第一转轴3和第二转轴13分别连接有减速电机2,带动减速电机2的主轴转动。根据电磁感应定律,减速电机内部转子转动,切割定子产生的磁感线,转子线圈内部产生感应电动势,外接负载形成闭合回路,形成感应电流。
34.同时,当摆球7摆动后,安装在其底部的第三永磁体12会与安装在磁铁托盘8中的第二永磁体10产生斥力,并与由第一永磁体9产生吸力,组成了多稳态机构。
35.该装置通过十字双轴式布局,能够捕获多个方向的振动激励,提高了对振动方向的适应性;通过多稳态机构,拓宽了装置的频率工作范围,增强了对波浪振动频率的适应性。
36.在运动的过程中,由于海波运动是多个方向振动的叠加,减速电机2最终产生电流的大小和方向也是无规律的,所以要搭载一个整流器用于将不规则交流电转换为直流电收集起来。
37.最后,还需要注意的是,以上列举的仅是本发明的一个具体实施例。显然,本发明不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1