一种剑杆织机主轴用磁阻电机的控制系统及控制方法与流程
1.本发明涉及剑杆织机控制系统与控制策略领域,具体是一种剑杆织机主轴用磁阻电机的控制系统及控制方法。
背景技术:
2.随着我国纺织工业水平的提高和产品出口的增长,织机作为纺织设备中最为重要的织造设备,在纺织行业中有着大量需求。从国外剑杆织机技术发展来看,在机电一体化、速度、选择等技术上,都发生了巨大变化,而国产织机设备与国外相比还有很大差距,尤其是在剑杆织机集成化控制系统方面。因此,改善、发展和提高国内剑杆织机控制系统的性能具有极大价值和重大意义。
3.目前,国内剑杆织机在速度上已达到较高水平,剑杆织机的后续发展不再是一味地追求速度,而是应当结合智能制造及节能减排等需求,追求更高的集成化、网络化程度,打破技术壁垒,实现主轴直驱技术的普及。控制系统是织机的心脏,这些需求的实现在很大程度上取决于控制系统。剑杆织机的主电机是驱动织机主轴的动力来源,针对织机控制系统来说,现有的织机主轴驱动控制技术有的采用三相异步电机皮带轮调速,它通过更换电机与主轴之间用于传动的皮带轮来实现转速的调节,还有一些采用三相异步电机结合变频器调速。对于这两种技术而言,成本略高、启动性能不强、效率低而且能耗大。
4.目前欧洲的主要剑杆织机生产厂商大都已采用永磁同步电机或srm调速系统,搭配直接转动结构,在简化了机械结构的同时,相较于变频调速系统也更加节能高效。与永磁同步电机相比,srm结构简单,成本更低,最大允许温升较高,不会出现永磁同步电机的因长时间过热导致的退磁现象。在性能上,srm的起动转矩可达到额定转矩的2倍,但是启动时有效电流却只有额定电流的1/3,可频繁启停与换向,在较广的转速和功率范围有高效率。综合以上特点,srm非常适合用于织机的直接传动,因此成为了各大织机厂商青睐的对象,是目前织机主轴驱动技术的主要发展方向。这种设计会使得在织机主轴驱动控制时的工作效率更高,启动性能更强,成本更低,能耗更小,更能满足实际工业生产需求。
5.目前,国内织机在机械结构与控制系统上的差距具体表现在:
6.1.以plc为控制核心,结合变频器、伺服驱动器等通用电气设备的控制结构,集成度低且成本高。通用电气设备可靠性和稳定性高、抗干扰能力强,开发周期短,研发过程类似于搭积木,易造成功能的冗余与浪费,且高端plc市场基本由国外厂家垄断,成本较高。文献《叶太强,何勇,沈小其,等.基于stm32f4嵌入式的剑杆织机控制系统设计[j].自动化与仪表,2019,34(03):9-13.》提出以两个stm32f4单片机为核心的控制系统,将系统分为五个子模块,但未考虑主轴直驱与系统网络化升级,且仍使用变频器等通用电气设备,集成度低,造成功能的冗余与浪费且本较高。
[0007]
2.主轴直接驱动技术并未普及。异步电机的局限性导致大部分国产织机仍采用皮带轮结合离合器的间接传动结构,结构复杂,增加了织机日常维护负担,启动性能弱,工作效率较低且能耗较高。文献《王英辉.高速剑杆织机自动控制系统设计[j].纺织报告,2020,
39(06):17-19.》提出的以16位单片机p51xa-s3为核心的剑杆织机控制系统,最高能够支持600转/分的主轴转速,但同样存在结构复杂,工作效率低与能耗较高等问题。
[0008]
3.织机智能化与信息化程度不高,可扩展性较差。由于硬件结构与接口的限制,现有的织机控制系统若要进行改造,很可能需要将整个控制系统更换掉,增加了系统升级的难度与成本。文献《王书,吴小艳.基于twincat&ethercat的剑杆织机监控系统研究[j].纺织科技进展,2019(08):17-19.》提出的剑杆织机控制系统,以twincat平台为基础设计控制及监控系统,通过ethercat协调下位机控制织机运转,但系统需以pc为软件运行平台,局限性较大。
技术实现要素:
[0009]
针对现有技术的不足,本发明拟解决的技术问题是,提供一种剑杆织机主轴用磁阻电机的控制系统及控制方法。
[0010]
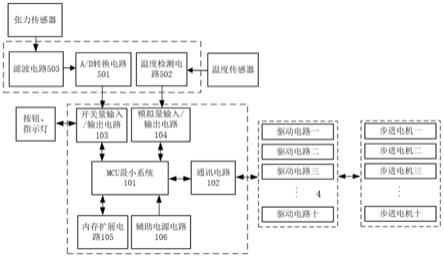
本发明解决所述控制系统技术问题的技术方案是,提供一种剑杆织机主轴用磁阻电机的控制系统,其特征在于,该控制系统包括主控模块、电送电卷控制模块、主轴驱动模块、选纬绞边控制模块和张力/温度检测模块;
[0011]
主控模块包括mcu最小系统(101)、通讯电路(102)、开关量输入/输出电路(103)和模拟量输入/输出电路(104);
[0012]
电送电卷控制模块包括隔离驱动电路(201)、速度检测电路(202)、母线电压检测电路、相电流检测电路、三相逆变电路(203)和整流滤波电路;
[0013]
主轴驱动模块包括电机驱动电路(301)、转子位置检测电路(302)、母线电压检测电路、相电流检测电路、功率变换电路(303)和整流滤波电路;
[0014]
张力/温度检测模块包括a/d转换电路(501)、温度检测电路(502)和滤波电路(503);
[0015]
剑杆织机上设置有张力传感器,用于检测经纱张力;滤波电路(503)的输入端与张力传感器通讯连接,输出端与a/d转换电路(501)通讯连接;a/d转换电路(501)通过开关量输入/输出电路(103)与mcu最小系统(101)通讯连接;织机主轴运行过程中,经纱张力需处于正常范围内;当经纱张力超出正常范围时,mcu最小系统(101)发出指令让织机主轴停止运行,并通过电送电卷控制模块调控经纱张力,使之处于正常范围内;
[0016]
整流滤波电路通过母线电压检测电路与mcu最小系统(101)通讯连接,将检测的电动电卷电机的母线电压信息反馈给mcu最小系统(101)进行处理,当母线电压超出正常范围时mcu最小系统(101)随即发出指令使得电送电卷电机停止工作;外界交流电通过整流滤波电路与三相逆变电路(203)通讯连接,将交流电整流滤波为直流电后,输送至三相逆变电路(203)中;三相逆变电路(203)与相电流检测电路通讯连接,三相逆变电路(203)将整流滤波后的直流电转换为uvw三相交流电来给剑杆织机的电送电卷电机供电;相电流检测电路与电送电卷电机连接,用于检测电送电卷电机的相电流大小;电送电卷电机的编码器通过速度检测电路(202)与mcu最小系统(101)通讯连接,速度检测电路(202)采集电送电卷电机的转速信息并传输给mcu最小系统(101)进行处理,mcu最小系统(101)通过转速信息的处理结果来调整其输出的pwm的频率或占空比;mcu最小系统(101)通过隔离驱动电路(201)与三相逆变电路(203)通讯连接,mcu最小系统(101)输出三路互补带死区的调整频率后的pwm信
号,经隔离驱动电路(201)隔离后,传输至三相逆变电路(203)中,控制三相逆变电路(203)输出相应频率的uvw三相交流电来控制电送电卷电机转速,进而调控经纱张力,为主轴电机的运行提供合适的张力环境;
[0017]
剑杆织机上设置有温度传感器,用于检测环境温度;温度检测电路(502)的输入端与温度传感器通讯连接,输出端通过模拟量输入/输出电路(104)与mcu最小系统(101)连接;织机主轴运行过程中,环境温度需处于正常范围内;当环境温度超出正常范围时,mcu最小系统(101)发出指令让织机主轴停止运行;
[0018]
通讯电路(102)与mcu最小系统(101)双向通讯连接;选纬绞边控制模块通过通讯电路(102)与mcu最小系统(101)通讯连接,选纬绞边控制模块检测剑杆织机的选纬器与绞边器的驱动电机的转速信息并通过通讯电路(102)传输给mcu最小系统(101),mcu最小系统(101)对转速信息进行运算;当驱动电机转速超出预先设定的转速范围时,mcu最小系统(101)发出命令,通过通讯电路(102)传输给选纬绞边控制模块,调整驱动电机的转速从而配合织机主轴的运动;当转速处于预先设定的转速范围时,mcu最小系统(101)发出命令,通过通讯电路(102)传输给选纬绞边控制模块,允许选纬器与绞边器工作;当织机主轴旋转到对应角度时,mcu最小系统(101)再次发出命令,通过通讯电路(102)传输给选纬绞边控制模块,控制织机执行选纬与绞边动作;
[0019]
整流滤波电路通过母线电压检测电路与mcu最小系统(101)通讯连接,将检测的主轴电机的母线电压信息反馈给mcu最小系统(101)进行处理,当母线电压超出正常范围时mcu最小系统(101)随即发出指令使得主轴电机停止工作;外界交流电通过整流滤波电路与功率变换电路(303)通讯连接,将交流电整流滤波为直流电后,输送至功率变换电路(303)中;功率变换电路(303)与相电流检测电路通讯连接,功率变换电路(303)将整流滤波后的直流电转换为uvw三相交流电来给主轴电机供电,同时起到增加磁阻电机起动转矩电流、减小转矩脉动的作用;相电流检测电路与主轴电机连接,用于检测主轴电机的相电流大小;主轴电机上设置的位置传感器通过转子位置检测电路(302)与mcu最小系统(101)通讯连接,转子位置检测电路(302)采集主轴电机的转子位置信息并传输给mcu最小系统(101)进行处理,mcu最小系统(101)通过转子位置信息的处理结果来调整其输出的pwm的频率或占空比;mcu最小系统(101)通过电机驱动电路(301)与功率变换电路(303)通讯连接,mcu最小系统(101)输出三路互补带死区的调整频率后的pwm信号,经电机驱动电路(301)隔离后,传输至功率变换电路(303)中,控制功率变换电路(303)输出相应频率的uvw三相交流电来控制主轴电机转速,进而实现对织机主轴的驱动。
[0020]
本发明解决所述方法技术问题的技术方案是,提供一种剑杆织机主轴用磁阻电机的控制方法,其特征在于,该方法包括以下步骤:
[0021]
步骤1、张力传感器和温度传感器分别检测经纱张力和环境温度,当两者均处于正常范围时进入步骤2,当两者超出正常范围时立即结束控制系统的运行;
[0022]
步骤2、mcu最小系统(101)通过母线电压检测电路开始检测电送电卷电机和srm的母线电压,通过相电流检测电路开始检测电送电卷电机和srm的相电流;当发现相电流存在过流或母线电压存在欠压或过压的情况时,立即结束控制系统的运行;当母线电压与相电流处于正常范围时,控制系统正常运行并持续检测母线电压和相电流,并进入步骤3;
[0023]
步骤3、首先进入中断程序,准备执行基于电压斩波控制的单神经元与模糊控制多
算法融合的单神经元模糊pid速度控制策略,然后通过位置传感器获取srm转子的位置,然后通过转子位置检测电路(302)将转子的位置信息传递给mcu最小系统(101),mcu最小系统(101)随即确定启动相并启动srm;
[0024]
步骤4、启动srm后,首先判断单神经元模糊pid速度控制策略是否允许执行;若允许执行,则设定mcu最小系统(101)中的定时器的预设时间范围,再对定时器的时间进行检测;如果检测时间不处于预设时间范围,则重新设定定时器的预设时间范围;如果检测时间处于预设时间范围,则将定时器时间清零并进入mcu最小系统(101)中执行单神经元模糊pid速度控制策略,每一个预设时间范围更新一次pwm的频率或占空比来实现srm转速的实时调节。
[0025]
与现有技术相比,本发明有益效果在于:
[0026]
1)本发明应用嵌入式控制技术,首次以功能集成度较高的stm32单片机为核心设计了各功能模块的硬件电路作为织机主轴驱动控制核心。对具体的被控织机上各个机构的功能及被控需求进行分析,根据织机控制需求,确定了控制系统硬件部分基于can总线通讯的全嵌入式多mcu的设计模式。相较于传统的相似的织机控制系统,提高了集成度并降低了控制成本且降低了能耗,并且基于总线结构的硬件架构可以很方便的对系统功能进行扩展,灵活性更高且工作效率更高。
[0027]
2)由于电网的波动或者电机不正常工作,可能会造成经整流滤波后的母线电压不在正常范围,因此,需要对电压加以监测,避免过高或者过低对srm的正常驱动造成影响。本发明的母线电压检测电路采用隔离检测的方法,首次提出使用霍尔电压传感器lv25-p对母线电压进行检测并应用于剑杆织机实际生产中。
[0028]
3)由于电网的波动或者电机不正常工作,可能会造成经整流滤波后的相电流不在正常范围,因此,需要对相电流加以监测,避免过高或者过低对srm的正常驱动造成影响。本发明首次提出使用霍尔电流传感器mt9221ct进行相电流检测并应用于剑杆织机的实际生产中。
[0029]
4)本发明的整流滤波电路,首次提出了使用限流电阻加继电器的组合方式进行整流并应用于剑杆织机的实际生产中。主轴驱动模块的驱动对象为5.5kw的磁阻电机,采用三相380v供电。三相交流电经整流桥转换为直流电后再通过电容进行蓄能滤波,为后续的功率变换器供电。由于电压较高,充电电流也较大,因此,本发明的整流滤波电路如此设计。
[0030]
5)本发明首次提出采用霍尔式位置检测并应用于剑杆织机的实际生产中,使用霍尔开关传感器njk-5002c进行转子位置检测,通过转子位置检测电路与mcu最小系统通讯。
[0031]
6)基于srm非线性、变结构的特性,本发明首次提出了基于电压斩波控制的单神经元与模糊控制多算法融合的单神经元模糊pid速度控制策略来改进pid参数,调整srm速度,从而实现对织机主轴的驱动控制。单神经元模糊pid速度控制策略是传统的pid算法经过单神经元与模糊控制的融合算法改进后的一种用于织机主轴的速度控制策略,相较于传统的相似的织机控制,算法具有更好的动态响应性能与动态特性,使得织机主轴驱动控制时的启动性能更强,工作效率更高,成本更低,能耗更小,更能满足实际工业生产需求。
附图说明
[0032]
图1为本发明的主控模块、选纬绞边控制模块和张力/温度检测模块的硬件连接
图;
[0033]
图2为本发明的主控模块、电送电卷控制模块和主轴驱动模块的硬件连接图;
[0034]
图3为本发明的母线电压检测电路图;
[0035]
图4为本发明的相电流检测电路图;
[0036]
图5为本发明的整流滤波电路图;
[0037]
图6为本发明的转子位置检测电路图;
[0038]
图7为本发明的整体控制流程图;
[0039]
图8为本发明的单神经元模糊pid速度控制策略流程图;
[0040]
图9为本发明的单神经元模糊pid速度控制器的结构图。
[0041]
图中,主控模块1、电送电卷控制模块2、主轴驱动模块3、选纬绞边控制模块4、张力/温度检测模块5;
[0042]
mcu最小系统101、通讯电路102、开关量输入/输出电路103、模拟量输入/输出电路104、内存扩展电路105、辅助电源电路106;
[0043]
隔离驱动电路201、速度检测电路202、三相逆变电路203;
[0044]
电机驱动电路301、转子位置检测电路302、功率变换电路303;
[0045]
a/d转换电路501、温度检测电路502、滤波电路503。
具体实施方式
[0046]
下面给出本发明的具体实施例。具体实施例仅用于进一步详细说明本发明,不限制本技术权利要求的保护范围。
[0047]
本发明提供了一种剑杆织机主轴用磁阻电机的控制系统(简称控制系统),其特征在于,该控制系统包括主控模块1、电送电卷控制模块2、主轴驱动模块3、选纬绞边控制模块4和张力/温度检测模块5;
[0048]
主控模块1包括mcu最小系统101、通讯电路102、开关量输入/输出电路103和模拟量输入/输出电路104;
[0049]
电送电卷控制模块2用于调控经纱张力,进而为主轴电机的运行提供合适的张力环境,包括隔离驱动电路201、速度检测电路202、母线电压检测电路、相电流检测电路、三相逆变电路203和整流滤波电路;
[0050]
主轴驱动模块3用于驱动主轴电机,进而实现对织机主轴的驱动,包括电机驱动电路301、转子位置检测电路302、母线电压检测电路、相电流检测电路、功率变换电路303和整流滤波电路;剑杆织机的主轴电机采用功率不大于5.5kw的磁阻电机(switched reluctance motor,简称srm),通过控制磁阻电机的旋转来带动织机主轴的旋转,主轴旋转的快慢是通过控制磁阻电机实现的。
[0051]
张力/温度检测模块5用于检测经纱张力和温度环境,包括a/d转换电路501、温度检测电路502和滤波电路503;
[0052]
开关量输入/输出电路103与mcu最小系统101双向通讯连接,开关量输入/输出电路103能够接收与输出开关量信号;剑杆织机上设置有张力传感器,用于检测经纱张力;滤波电路503的输入端与张力传感器通讯连接,输出端与a/d转换电路501通讯连接;a/d转换电路501通过开关量输入/输出电路103与mcu最小系统101通讯连接;张力传感器将检测到
的经纱张力信息以电信号的形式传输给滤波电路503进行滤波后,通过a/d转换电路501进行a/d转换,再通过开关量输入/输出电路103转换为开关量信号传输给mcu最小系统101进行处理;织机主轴运行过程中,经纱张力需处于正常范围内;当经纱张力超出正常范围时,mcu最小系统101发出指令让织机主轴停止运行,并通过电送电卷控制模块2调控经纱张力,使之处于正常范围内;
[0053]
剑杆织机的电送电卷电机所用直流电由交流电经整流滤波电路转换而来,但是由于电网的波动,可能会造成整流滤波后的直流电不在正常范围内,进而对电机的正常驱动造成影响,因此,整流滤波电路通过母线电压检测电路与mcu最小系统101通讯连接,将检测的电动电卷电机的母线电压信息反馈给mcu最小系统101进行处理,当母线电压超出正常范围时mcu最小系统101随即发出指令使得电送电卷电机停止工作;外界交流电通过整流滤波电路与三相逆变电路203通讯连接,将交流电整流滤波为直流电后,输送至三相逆变电路203中;三相逆变电路203与相电流检测电路通讯连接,三相逆变电路203将整流滤波后的直流电转换为uvw三相交流电来给剑杆织机的电送电卷电机供电;相电流检测电路与电送电卷电机连接,用于检测电送电卷电机的相电流大小;电送电卷电机的编码器通过速度检测电路202与mcu最小系统101通讯连接,速度检测电路202采集电送电卷电机的转速信息并传输给mcu最小系统101进行处理,mcu最小系统101通过转速信息的处理结果来调整其输出的pwm的频率或占空比;mcu最小系统101通过隔离驱动电路201与三相逆变电路203通讯连接,mcu最小系统101输出三路互补带死区的调整频率后的pwm信号,经隔离驱动电路201隔离来排除噪声干扰后,传输至三相逆变电路203中,控制三相逆变电路203输出相应频率的uvw三相交流电来控制电送电卷电机转速,进而调控经纱张力,为主轴电机的运行提供合适的张力环境;
[0054]
模拟量输入/输出电路104与mcu最小系统101双向通讯连接;剑杆织机上设置有温度传感器,用于检测环境温度;温度检测电路502的输入端与温度传感器通讯连接,输出端通过模拟量输入/输出电路104与mcu最小系统101连接,温度传感器将检测到的环境温度信息传输给温度检测电路502,温度检测电路502将环境温度信息以电信号的形式传输给模拟量输入/输出电路104,模拟量输入/输出电路104转换为模拟量信号,再传输给mcu最小系统101进行处理;织机主轴运行过程中,环境温度需处于正常范围内;当环境温度超出正常范围时,mcu最小系统101发出指令让织机主轴停止运行;
[0055]
通讯电路102与mcu最小系统101双向通讯连接;选纬绞边控制模块4通过通讯电路102与mcu最小系统101通讯连接,选纬绞边控制模块4检测剑杆织机的选纬器与绞边器的驱动电机的转速信息并通过通讯电路102传输给mcu最小系统101,mcu最小系统101对转速信息进行运算;当驱动电机转速超出预先设定的转速范围时,mcu最小系统101发出命令,通过通讯电路102传输给选纬绞边控制模块4,调整驱动电机的转速从而配合织机主轴的运动;当转速处于预先设定的转速范围时,mcu最小系统101发出命令,通过通讯电路102传输给选纬绞边控制模块4,允许选纬器与绞边器工作;当织机主轴旋转到对应角度时,mcu最小系统101再次发出命令,通过通讯电路102传输给选纬绞边控制模块4,控制织机执行选纬与绞边动作;
[0056]
剑杆织机的主轴电机所用直流电由交流电经整流滤波电路转换而来,但是由于电网的波动,可能会造成整流滤波后的直流电不在正常范围内,进而对电机的正常驱动造成
影响,因此,整流滤波电路通过母线电压检测电路与mcu最小系统101通讯连接,将检测的主轴电机的母线电压信息反馈给mcu最小系统101进行处理,当母线电压超出正常范围时mcu最小系统101随即发出指令使得主轴电机停止工作;外界交流电通过整流滤波电路与功率变换电路303通讯连接,将交流电整流滤波为直流电后,输送至功率变换电路303中;功率变换电路303与相电流检测电路通讯连接,功率变换电路303将整流滤波后的直流电转换为uvw三相交流电来给主轴电机(即磁阻电机)供电,同时起到增加磁阻电机起动转矩电流、减小转矩脉动的作用;相电流检测电路与主轴电机连接,用于检测主轴电机的相电流大小;主轴电机上设置的位置传感器通过转子位置检测电路302与mcu最小系统101通讯连接,转子位置检测电路302采集主轴电机的转子位置信息并传输给mcu最小系统101进行处理,mcu最小系统101通过转子位置信息的处理结果来调整其输出的pwm的频率或占空比;mcu最小系统101通过电机驱动电路301与功率变换电路303通讯连接,mcu最小系统101输出三路互补带死区的调整频率后的pwm信号,经电机驱动电路301隔离来排除噪声干扰后,传输至功率变换电路303中,控制功率变换电路303输出相应频率的uvw三相交流电来控制主轴电机转速,进而实现对织机主轴的驱动。
[0057]
优选地,剑杆织机上的按钮和指示灯通过开关量输入/输出电路103与mcu最小系统101通讯连接,mcu最小系统101通过开关量输入/输出电路103将控制信号作用于指示灯,按钮将信号通过开关量输入/输出电路103传输给mcu最小系统101。
[0058]
优选地,主控模块1还包括内存扩展电路105和辅助电源电路106;内存扩展电路105与mcu最小系统101双向通讯连接,内存扩展电路105可以实现系统掉电后对数据的保存并将保存的数据实时传输给mcu最小系统101;辅助电源电路106为mcu最小系统101供电。
[0059]
优选地,mcu最小系统101以stm32f407vet6单片机为核心;内存扩展电路中采用容量为512k字节的at24c512芯片,通过iic总线与单片机通讯;通讯电路102包括can、rs485接口电路、以太网接口,分别采用的是iso1050dub、max3485以及lan8270通讯芯片。
[0060]
优选地,剑杆织机的选纬器和绞边器的驱动电机均为相同型号的步进电机,共10个,额定电压24v。选纬绞边控制模块4由10个步进电机的驱动电路集成,可减小模块的体积与成本,提高集成度;驱动电路之间相互独立,每个驱动电路以步进电机驱动芯片tb6600hg为核心。
[0061]
优选地,所述母线电压检测电路(如图3所示)采用隔离检测的方法,首次使用霍尔电压传感器lv25-p进行电压检测并应用于剑杆织机的实际生产中。正常情况下母线电压约为310v,lv25-p工作在线性度最高的状态时需要初级线圈电流在10ma左右,因此,限流电阻大小应为31kω左右,取两个电阻(r4和r2)串联,大小为32.1kω。以310v
±
15%的电压波动计算,初级线圈流过的电流在8.2~11.1ma之间,输出电流是初级线圈电流的2.5倍,则输出电流在20.5~27.8ma之间。mcu最小系统101输入电压不能高于3.3v,所以,采样电阻r7阻值为100ω。母线电压检测电路的电路构成是:霍尔电压传感器lv25-p的ht+引脚依次串联电阻r4和电阻r2后接a端,ht-引脚接b端,4引脚和5引脚分别接15v电源的正极和负极;lv25-p的m引脚分别接电阻r6的1引脚和采样电阻r7的1引脚,r7的2引脚分别接gnd和电容c3的一端,r6的2引脚接电容c3的另一端并输出与母线电压大小对应的电压信号u1给mcu最小系统101;a端和b端用于连接整流滤波电路和母线电压检测电路;u1是母线电压检测电路输出的与母线电压大小对应的电压信号,电阻r6与电容c3组成低通滤波电路,u1经电容c3滤波后
送入mcu最小系统101中进行处理。
[0062]
优选地,所述相电流检测电路(如图4所示)采用霍尔电流传感器进行相电流检测并应用于剑杆织机的实际生产中。电机功率1.5kw,峰值电流不超过20a,因此采用量程为-20a~+20a的mt9221ct-20br5的霍尔电流传感器芯片。mt9221ct的ip+与ip-引脚为电流检测引脚,芯片工作电压为5v;滤波电容c44可调整传感器输出带宽,降低输出噪声,滤波电容为0.027uf时,输出带宽约为10khz,噪声在20mv以内;传感器输出电压在0~4.5v之间,为匹配单片机0~3.3v的adc转换范围,通过r39与r42进行分压,将电压限制在2.7v以下;同时r39与c43组成截止频率约为80khz的rc低通滤波电路,对输出电压进行低通滤波。相电流检测电路的电路构成是:mt9221ct的2个ip+引脚接三相电的u相、v相或w相中的一个,2个ip-引脚接gnd,vcc引脚接5v电压的正极并通过去耦电容c40接agnd,viout引脚接电阻r39的1引脚,filter引脚接滤波电容c44的1引脚,gnd引脚接agnd后与c44的2引脚、r42的1引脚和c43的1引脚连接;r39的2引脚分别接电阻r42的2引脚和电容c43的2引脚并输出与相电流大小对应电压信号u2给mcu最小系统101;u2是相电流检测电路输出的与相电流大小对应的电压信号,电阻r39与电容c43组成低通滤波电路,u2经电容c43滤波后送入mcu最小系统101中进行处理。
[0063]
优选地,所述整流滤波电路(如图5所示)采用限流电阻加继电器的组合方式并应用于剑杆织机的实际生产中。开始充电时继电器k1断开,当检测到a端和b端之间的电压增加到额定值的80%后,mcu最小系统101控制继电器k1吸合,将限流电阻r1短路。限流电阻r1采用小功率大阻值的限流电阻,阻值根据滤波电容的大小来选择;r2与d7起到上电指示的作用。整流滤波电路的电路构成是:三相交流电接口p1的1引脚接三相整流桥堆d7的r引脚,2引脚接d7的t*引脚,3引脚接d7的s引脚;d7的p引脚串联限流电阻r1后接a端,n引脚接b端;二极管d8的两端接限流电阻短路继电器k1的两端;d8的阳极接agnd,阴极接k1的oy0引脚;压敏电阻rt1的两端分别接a端和b端;电阻r2的1引脚接a端,2引脚接发光二极管d5的阳极,d5的阴极接b端;电容的均压电阻r3的1引脚接a端,2引脚接电容的均压电阻r4的1引脚,r4的2引脚接b端;在a端与r3的2引脚之间并联有储能滤波电容c31与储能滤波电容c32,在r4的1引脚与b端之间并联有储能滤波电容c33与储能滤波电容c34;a端和b端用于连接整流滤波电路和母线电压检测电路。
[0064]
图3和图5中,a端和b端用于连接整流滤波电路和母线电压检测电路。
[0065]
优选地,转子位置的精准检测是驱动srm的关键,本发明首次提出采用霍尔式位置检测并应用于剑杆织机的实际生产中。霍尔式位置检测采用位置传感器+转子位置检测电路302的方式实现。位置传感器采用霍尔开关传感器njk-5002c,由固定的传感器探头与随转子转动的磁极组成,这样在转子转动时位置传感器便会输出随转子位置变化的占空比为50%的开关信号。所用srm为三相12/8极,为正确驱动srm,需要三个位置传感器来指示转子位置,三个位置传感器会输出周期相同,相位差为120
°
的方波,其中每个周期在物理上代表转子转过了45
°
,每45
°
有6个位置状态,srm的驱动时序循环一次。控制系统会根据这6个状态来确定驱动srm的某一相或两相,来实现srm的驱动。位置信号采用db9端口输入,5v电源为位置传感器供电,mcu最小系统101工作电压虽然为3.3v,但是大多数i/o口都可容忍5v电压,因此位置传感器的输出信号经过滤波后可直接送入mcu最小系统101。转子位置检测电路302(如图6所示)的电路构成是:db9端口的1、2、3引脚分别与位置传感器的p1端、p2端、p3
端连接,5引脚接5v电源的正极,6引脚接gnd,其他引脚空置;电阻r29与电容c74并联后,一端接位置传感器的p1端,另一端接gnd;电阻r31与电容c75并联后,一端接位置传感器的p2端,另一端接gnd;电阻r32与电容c76并联后,一端接位置传感器的p3端,另一端接gnd。
[0066]
本发明同时提供了一种剑杆织机主轴用磁阻电机的控制方法(简称方法),其特征在于,该方法包括以下步骤:
[0067]
步骤1、张力传感器和温度传感器分别检测经纱张力和环境温度,当两者均处于正常范围时进入步骤2,当两者超出正常范围时立即结束控制系统的运行;
[0068]
步骤2、mcu最小系统101通过母线电压检测电路开始检测电送电卷电机和srm的母线电压,通过相电流检测电路开始检测电送电卷电机和srm的相电流;当发现相电流存在过流或母线电压存在欠压或过压的情况时,立即结束控制系统的运行;当母线电压与相电流处于正常范围时,控制系统正常运行并持续检测母线电压和相电流,并进入步骤3;
[0069]
步骤3、首先进入中断程序,准备执行基于电压斩波控制的单神经元与模糊控制多算法融合的单神经元模糊pid速度控制策略(简称单神经元模糊pid速度控制策略),然后通过位置传感器获取srm(即主轴电机)转子的位置,然后通过转子位置检测电路302将转子的位置信息传递给mcu最小系统101,mcu最小系统101随即确定启动相并启动srm;
[0070]
步骤4、启动srm后,首先判断单神经元模糊pid速度控制策略是否允许执行,之后设定mcu最小系统101中的定时器的预设时间范围(本实施例的预设时间范围为1ms),再对定时器的时间进行检测;如果检测时间不处于预设时间范围,则重新设定定时器的预设时间范围;如果检测时间处于预设时间范围,则将定时器时间清零并进入mcu最小系统101中执行单神经元模糊pid速度控制策略,每一个预设时间范围更新一次pwm的频率或占空比来实现srm转速的实时调节。
[0071]
优选地,单神经元模糊pid速度控制策略具体包括如下步骤:
[0072]
(1)开启定时器,定时器每一个预设时间范围产生1次中断信号,使定时器能够产生固定频率的中断,同时对单神经元算法的参数和模糊控制算法的参数进行初始化并进入第一次运算;单神经元算法的参数包括学习速率和权值wi(k),i=1、2、3,模糊控制算法的参数包括增益k;
[0073]
(2)根据织机主轴的位置信号变化的不同进入相应的中断,在mcu最小系统101中的中断处理函数中计算srm的实际速度y(k);再根据srm驱动的织机主轴的实际速度y(k)与期望速度r(k)计算出速度偏差e(k)=r(k)-y(k)、偏差总和以及偏差变化率e(k)-e(k-1),得到单神经元模糊pid速度控制器的输出y(k)';
[0074]
优选地,步骤(2)中,期望速度r(k)根据电送电卷电机的速度以及选纬器和绞边器的驱动电机的速度确定。
[0075]
优选地,步骤(2)具体是:单神经元模糊pid速度控制器包括基于单神经元算法的单神经元pid控制模块与基于模糊控制算法的模糊控制模块(如图9所示);
[0076]
s1、将速度偏差(即pid算法的偏差值)e(k)、偏差总和(即pid算法的积分环节)以及偏差变化率(即pid算法的微分环节)e(k)-e(k-1)作为单神经元pid控制模块
的输入,送入到单神经元pid控制模块中进行运算,令x1(k)=e(k)、x3(k)=e(k)-e(k-1),再利用单神经元算法将其与各自对应的权值wi(k),i=1、2、3即w1(k)、w2(k)、w3(k)相乘,得到单神经元pid控制模块的输出x1(k)w1(k)、x2(k)w2(k)和x3(k)w3(k);
[0077]
利用模糊控制算法将偏差变化率e(k)-e(k-1)作为模糊控制模块的输入,送入到模糊控制模块中进行模糊推理,得到增益k;
[0078]
s2、将利用单神经元算法与模糊控制算法得到的结果相融合,即将单神经元pid控制模块的输出x1(k)w1(k)、x2(k)w2(k)和x3(k)w3(k)相加之和与增益k相乘,得到单神经元模糊pid速度控制器的输出y(k)',如式(1)所示:
[0079][0080]
(3)mcu最小系统101根据单神经元模糊pid速度控制器的输出y(k)'来计算对应的pwm输出频率或占空比,进而调整srm的实际速度y(k),并更新相应的寄存器;
[0081]
(4)更新实际速度后,利用单神经元算法更新单神经元模糊pid速度控制器中的权值,利用模糊控制算法更新单神经元模糊pid速度控制器中的增益k,使得单神经元模糊pid速度控制器适应磁阻电机正常工作时的非线性环境;
[0082]
优选地,步骤(4)中,更新权值wi(k),i=1、2、3采用有监督的hebb学习规则,如式(2)所示:
[0083][0084]
式(2)中,η
p
、ηi、ηd分别为比例、积分与微分三个系数的学习速率;k表示迭代次数;w1(k)表示速度偏差e(k)的权值;w2(k)表示偏差总和的权值;w3(k)表示偏差变化率e(k)-e(k-1)的权值;
[0085]
对于各个输入量的初始权值wi(0)来说,可以任意设置,因为在迭代开始后权值会迅速接近最优解。权值的学习速率主要影响系统的调节时间,可以根据系统实际运行情况来进行调整。
[0086]
本发明未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1