双向CLLLC谐振变换器控制方法、电子设备及变换器与流程
双向clllc谐振变换器控制方法、电子设备及变换器
技术领域
1.本发明涉及电力电子变换器技术领域,具体而言,涉及一种双向clllc谐振变换器控制方法、电子设备及变换器。
背景技术:
2.近年来,随着新能源汽车、电池储能和充电技术的飞速发展,可支持双向功率流动的隔离dc/dc拓扑受到越来越多的关注。隔离dc/dc拓扑可分为谐振拓扑和非谐振拓扑,其中,谐振拓扑包括双向lllc、双向cllc和双向clllc(一种由c-l-l-l-c组合而成的谐振网络,其中c代表电容,l代表电感)等,非谐振拓扑包括双向dab(double active bridge,双边活动桥臂)拓扑等。双向clllc谐振变换器因其工作在软开关状态下,比非谐振拓扑效率更高,应用越来越广泛,但是双向clllc谐振变换器存在增益非线性、输出功率不能到零、调压范围小和轻载时增益不可控等问题,为了解决这些问题,变模态控制技术被提了出来。
3.现有的双向clllc谐振变换器变模态控制方法是将输入电压分为低、中、高三段,三段分别采用pfm(pulse frequency modulation,脉冲频率调节)、ppm(pulse phase modulation脉冲移相角调节)、pwm(pulse width modulation脉冲宽度调节)控制方式,并设置它们之间的衔接点以保证输出功率的平滑。这种方法可以在一定程度上可扩大调压范围,但是,从ppm移相模式切换到pwm调占空比模式时将引入更多的次生谐波和无功电流震荡,造成功耗急剧上升和效率大幅下降。
技术实现要素:
4.本发明的目的在于提供一种双向clllc谐振变换器控制方法、电子设备及变换器。
5.第一方面,本发明提供了一种双向clllc谐振变换器控制方法,包括:
6.当控制模式为增大双向clllc谐振变换器的输出功率时,采用半桥移相调制模态增加移相角,以增加所述输出功率;当所述移相角等于预设的最大移相角时,采用半桥频率调制模态增加工作频率,以增加所述输出功率;当所述工作频率等于预设的最大工作频率时,将所述双向clllc谐振变换器切换至全桥工作模式,所述全桥工作模式工作点的所述工作频率为预设的最小工作频率,所述移相角为预设的移相角切换值;基于所述移相角切换值采用全桥移相调制模态增加所述移相角,以增加所述输出功率;当移相角等于所述最大移相角时,基于所述最小工作频率采用全桥频率调制模态增加所述工作频率,以增加所述输出功率至给定功率;当所述控制模式为减小所述双向clllc谐振变换器的输出功率时,采用全桥频率调制模态减小工作频率,以减小所述输出功率;当所述工作频率等于最小工作频率时,采用全桥移相调制模态减小所述移相角,以减小所述输出功率;当所述移相角等于所述移相角切换值时,将所述双向clllc谐振变换器切换至半桥工作模式,所述半桥工作模式工作点的所述工作频率为最大工作频率,所述移相角为最大移相角;基于所述最大工作频率采用半桥频率调制模态减小所述工作频率,以减小所述输出功率;当所述工作频率等于最小工作频率时,基于所述最大移相角采用半桥移相调制模态减小所述移相角,以减小
所述输出功率至所述给定功率。
7.可选地,在所述将所述双向clllc谐振变换器切换至全桥工作模式,或所述采用全桥移相调制模态减小所述移相角之前,还包括:
8.基于输出功率相等原则,根据所述最小工作频率、所述最大工作频率和所述最大移相角确定所述移相角切换值,且所述移相角切换值小于所述最大移相角。
9.可选地,所述移相角的工作区间为[-2pi/5,+2pi/5],所述工作频率的工作区间为其中,且k>1,lm为所述双向clllc谐振变换器的原边励磁电感,lr为所述双向clllc谐振变换器的原边谐振电感。
[0010]
可选地,所述双向clllc谐振变换器的原边谐振电感和谐振电容满足第九公式,第九公式包括:
[0011][0012]
其中,α
max
为最大移相角;w
n_max
为所述最大工作频率;r
load
为负载电阻;m
aim
为预设的目标增益;n为变压器匝数;cr为所述双向clllc谐振变换器的谐振电容;lr为所述双向clllc谐振变换器的原边谐振电感;k为所述双向clllc谐振变换器的原边励磁电感与原边谐振电感的比值;所述双向clllc谐振变换器的原边谐振电感的感值等于副边谐振电感的感值。
[0013]
可选地,还包括:获取所述给定功率和所述双向clllc谐振变换器反馈的输出功率;确定所述给定功率和所述输出功率之间的误差量,并将所述误差量和最大调节分辨率进行对比,其中,所述最大调节分辨率为所述移相角或所述工作频率调节一个最小单位时所述输出功率的最大变化量;根据对比结果和所述误差量的方向确定所述控制模式。
[0014]
可选地,所述根据对比结果和所述误差量的方向确定所述控制模式包括:
[0015]
当所述误差量大于所述最大调节分辨率,且所述误差量为正向时,所述控制模式为增大双向clllc谐振变换器的输出功率;
[0016]
当所述误差量大于所述最大调节分辨率,且所述误差量为负向时,所述控制模式为减小双向clllc谐振变换器的输出功率。
[0017]
可选地,所述获取所述给定功率和所述双向clllc谐振变换器反馈的输出功率之后,还包括:根据所述给定功率的方向确定所述移相角的调节方向和所述最大移相角的方向。
[0018]
可选地,所述半桥移相调制模态和所述全桥移相调制模态中,所述输出功率与所述移相角之间呈连续单调关系;所述半桥频率调制模态和所述全桥频率调制模态中,所述输出功率与所述工作频率之间呈连续单调关系。
[0019]
第二方面,本发明提供了一种电子设备,包括存储器和处理器;
[0020]
所述存储器,用于存储计算机程序;
[0021]
所述处理器,用于当执行所述计算机程序时,实现如第一方面任一项所述的双向clllc谐振变换器控制方法。
[0022]
第三方面,本发明提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如第一方面任一项所述的双向clllc谐振
变换器控制方法。
[0023]
第四方面,本发明提供了一种双向clllc谐振变换器,包括一次侧电路、clllc谐振腔、二次侧电路和如第二方面所述的电子设备,所述一次侧电路通过所述clllc谐振腔与所述二次侧电路电连接,所述电子设备分别与所述一次侧电路和所述二次侧电路电连接。
[0024]
本发明的双向clllc谐振变换器控制方法、电子设备及变换器的有益效果是:当增大双向clllc谐振变换器的输出功率时,依次通过半桥移相调制模态、半桥频率调制模态、半桥工作模式切换至全桥工作模式、全桥移相调制模态和全桥频率调制模态进行调节。对应地,当减小双向clllc谐振变换器的输出功率时,依次通过全桥频率调制模态、全桥移相调制模态、全桥工作模式切换至半桥工作模式、半桥频率调制模态和半桥移相调制模态进行调节。各个环节相互衔接,在各个调节环节中,输出功率仅与单一变量(工作频率或移相角)相关,并且明确了半桥工作模式和全桥工作模式切换时的工作点,能够实现输出功率正反向平滑无中断调节,同时充分发挥各个调制模态的调节能力,使得输出功率最大化且线性连续可调。并且,在全桥工作模式或半桥工作模式下,当调节工作频率无法对输出功率进行有效调节,即双向clllc谐振变换器轻载时,采用移相调制模态来调节输出功率,输出功率跟随移相角的变化而变化,不受工作频率的影响,如果给定功率为0,当移相角为0时,输出功率为0,解决了输出功率不能到零和轻载时增益不可控的问题,扩大了调压范围。并且,相较于现有技术,本发明仅采用了移相调制模态和频率调制模态,不涉及pwm调占空比模态,不会引入大量的次生谐波和无功电流震荡,避免了功率急剧上升和效率大幅下降。
附图说明
[0025]
图1为本发明实施例的一种双向clllc谐振变换器的拓扑结构示意图;
[0026]
图2为本发明实施例的一种双向clllc谐振变换器的结构示意图;
[0027]
图3为本发明的双向clllc谐振变换器工作在半桥工作模式下的示意图;
[0028]
图4为本发明实施例的双向clllc谐振变换器的等效电路图;
[0029]
图5为本发明实施例的半桥、全桥移相谐振腔激励电压波形图;
[0030]
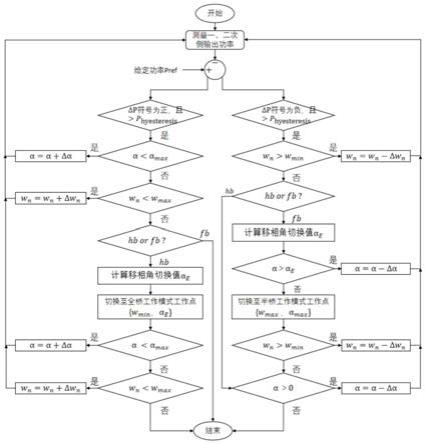
图6为本发明实施例的双向clllc谐振变换器控制方法的流程图;
[0031]
图7为本发明实施例的增大双向clllc谐振变换器的输出功率的流程图;
[0032]
图8为本发明实施例的减小双向clllc谐振变换器的输出功率的流程图;
[0033]
图9为本发明实施例的变模态控制过程示意图;
[0034]
图10为本发明实施例的双向clllc谐振变换器的输出功率与移相角之间的关系图;
[0035]
图11为本发明实施例的判断移相角调节方向和最大移相角方向的示意图;
[0036]
图12为本发明实施例的仿真输出结果跟踪功率给定信号的情况示意图;
[0037]
图13为本发明实施例的给定第一阶段控制过程的示意图;
[0038]
图14为本发明实施例的给定第二阶段控制过程的示意图;
[0039]
图15为本发明实施例的给定第三阶段控制过程的示意图;
[0040]
图16为本发明实施例的给定第四阶段控制过程的示意图;
[0041]
图17为本发明实施例的仿真过程中的半桥工作模式切换至全桥工作模式的切换点的示意图;
[0042]
图18为本发明实施例的仿真过程中的全桥工作模式切换至半桥工作模式的切换点的示意图;
[0043]
图19为本发明实施例的仿真过程中软起动点、软转向点和软停机点的示意图。
具体实施方式
[0044]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。应当理解的是,本发明的附图及实施例仅用于示例性作用,并非用于限制本发明的保护范围。
[0045]
应当理解,本发明的方法实施方式中记载的各个步骤可以按照不同的顺序执行,和/或并行执行。此外,方法实施方式可以包括附加的步骤和/或省略执行示出的步骤。本发明的范围在此方面不受限制。
[0046]
本文使用的术语“包括”及其变形是开放性包括,即“包括但不限于”。术语“基于”是“至少部分地基于”。术语“一个实施例”表示“至少一个实施例”;术语“另一实施例”表示“至少一个另外的实施例”术语“可选地”表示“可选的实施例”。其他术语的相关定义将在下文描述中给出。需要注意,本发明中提及的“第一”、“第二”等概念仅用于对不同的装置、模块或单元进行区分,并非用于限定这些装置、模块或单元所执行的功能的顺序或者相互依存关系。本发明中提及的“一个”、“多个”的修饰是示意性而非限制性的,本领域技术人员应当理解,除非在上下文另有明确指出,否则应该理解为“一个或多个”。
[0047]
在介绍本发明的双向clllc谐振变换器控制方法、电子设备和变换器之前,首先介绍一下双向clllc谐振变换器拓扑。
[0048]
如图1所示,本发明实施例的双向clllc谐振变换器拓扑结构图中,q1、q2、q3、q4为一次侧的四只功率开关管,q5、q6、q7、q8是二次侧的四只功率开关管,功率开关管可包括mosfet和igbt等。vdc_in是一次侧电源或负载。中间的虚线框部分为clllc谐振腔,其中lr1为一次侧谐振电感,cr1为一次侧谐振电容,lm为一次侧励磁电感,变压器t的变比为n:1,lr2为二次侧谐振电感,cr2为二次侧谐振电容,vdc_out为二次侧的电源或负载。
[0049]
在现有的双向clllc谐振变换器的谐振控制电路中,控制器通常采集双向clllc谐振变换器工作时的正、反向输出电压或者输出电流或者谐振电容电压,以输出电压或者输出电流或者谐振电容电压为控制变量,通过控制环的作用输出控制指令至一次侧和二次侧桥臂开关管的使能端。
[0050]
如图2所示,本发明实施例提供的一种双向clllc谐振变换器,包括一次侧电路、clllc谐振腔、二次侧电路和如下所述的电子设备,所述一次侧电路通过所述clllc谐振腔与所述二次侧电路电连接,所述电子设备分别与所述一次侧电路和所述二次侧电路电连接。
[0051]
具体地,电子设备可包括控制器、工控机和计算机等数据处理设备,图2中以控制器为例,本实施例中,控制器采集双向clllc谐振变换器工作时的正、反向输出电压和输出电流,从而得到输出功率,以输出功率为控制变量,通过控制环的作用输出控制指令至一次侧和二次侧桥臂开关管的使能端。
[0052]
本可选的实施例中,直接采用功率流作为反馈信号进行控制,相较于现有技术中以输出电压为反馈信号进行控制,能够实现功率流的正反向平滑线性调节。
[0053]
需要说明的是,图2所示电路仅为基本电路,实际设计时该电路可包含更多元器件。
[0054]
在介绍本发明的双向clllc谐振变换器控制方法之前,先对控制方法中的一下操作进行解释。
[0055]
在本发明的控制算法中,会对双向clllc谐振变换器进行切桥操作。双向clllc谐振变换器具有半桥和全桥两种工作模式,切桥是指将双向clllc谐振变换器从半桥工作模式切换至全桥工作模式,或,从全桥工作模式切换至半桥工作模式。
[0056]
全桥工作模式定义为任何时候一、二次侧两个桥臂全部使能高频开关工作。参见图1,在全桥工作模式下,一次侧对角线上的两个开关管q1与q4同时导通、关断,q2与q3同时导通、关断,二次侧对角线上的两个开关管q5与q8同时导通、关断,q6与q7同时导通、关断。
[0057]
半桥工作模式指任何时候一、二次侧有且仅有一对上、下开关管使能高频开关工作,另一对开关管处于“静止”状态,其中上开关管关断,下开关管导通,如图3所示。因为一、二次侧各有两个半桥,半桥工作模式因此有4种组合形式:
[0058]
(1)一次侧q1与q2互补导通、关断,q3保持关断,q4保持导通,同时二次侧q5与q6互补导通、关断,q7保持关断,q8保持导通,如图1所示。
[0059]
(2)q3与q4互补导通、关断,q1保持关断,q2保持导通,同时q7与q8互补导通、关断,q5保持关断,q6保持导通。
[0060]
(3)一次侧q1与q2互补导通、关断,q3保持关断,q4保持导通,同时二次侧q7与q8互补导通、关断,q5保持关断,q6保持导通。
[0061]
(4)q3与q4互补导通、关断,q1保持关断,q2保持导通,同时q5与q6互补导通、关断,q7保持关断,q8保持导通。
[0062]
四种形式的半桥工作模式均可切换为全桥工作模式运行,全桥工作模式也可切换为任一形式的半桥工作模式运行。
[0063]
为定义移相角α,我们对图1的电路进行等效处理,其中vin_sw表示一次侧激励,vout_sw表示二次侧激励电压。同时根据能量守恒,将二次侧的谐振电感lr2、cr2“映射”到一次侧,可得到如图4所示的等效电路:
[0064]
移相角α定义为一次侧激励电压vin_sw和二次侧激励电压vout_sw之间的相位差。
[0065]
如图5左半部分所示的半桥驱动波形,半桥工作模式下,vin_sw是幅度为0至vdc_in,频率为w,占空比50%的周期性方波,vout_sw是幅度为0至vdc_out,频率为w,占空比50%的周期性方波,因vin_sw和vout_sw之间存在相位差α,加载在谐振腔的激励电压可以表示为vin_sw和vout_sw之差,是为vsw。
[0066]
与之类似,如图5右半部分所示的全桥驱动波形,全桥工作模式下vin_sw是幅度为+vdc_in至-vdc_in,频率为w,占空比50%的周期性方波,vout_sw是幅度为+vdc_out至-vdc_out,频率为w,占空比50%的周期性方波。
[0067]
如图5所示,全桥工作模式时vsw显然比半桥工作模式的vsw幅度更高,这意味着更强的带载能力,因此,本发明中变换器轻载输出时工作在半桥工作模式,重载时工作在全桥工作模式。另外,移相角α的变化会影响vsw的脉冲宽度,工作频率w的变化会影响clllc谐振腔的阻抗,进而影响输出至负载的输出功率。
[0068]
本可选的实施例中,双向clllc谐振变换器轻载时工作在半桥工作模式,能够使一
半开关管处于静默状态,降低变换器功耗;母线电压利用率减半,环流减小,减小了变换器铜耗;半桥工作模式下调节分辨率更高,当全桥工作模式下输出功率/工作频率的斜率趋于0时切换到半桥工作模式,可以实现在轻载时的高分辨调节。
[0069]
需要说明的是,本发明的双向clllc谐振变换器控制方法、电子设备及变换器可应用于新能源汽车、储能电站和充电设施等场景中。
[0070]
如图6至图8所示,本发明实施例提供的一种双向clllc谐振变换器控制方法,包括:
[0071]
步骤s110,如图7所示,当控制模式为增大双向clllc谐振变换器的输出功率时,采用半桥移相调制模态增加移相角,以增加所述输出功率。
[0072]
具体地,如图6所示,比对当前移相角α和最大移相角α
max
,判断当前移相角是否小于最大移相角,若否,则进入半桥频率调制模态;若是,则采用半桥移相调制模态增大移相角,每次增大一个移相角单位δα,直至移相角等于最大移相角,进入半桥频率调制模态。
[0073]
示例性地,如图9所示为假设调节输出功率从0开始增大,一、二次侧各使能一个半桥工作。半桥移相调制模态对应图9中的模态[1],即a-b阶段或a
’‑
b’阶段,此时,一、二次侧半桥的上、下开关管的初始工作频率为最小工作频率w
min
,初始占空比为50%,初始移相角为α=0。随着负载功率的升高,一、二次侧之间的移相角α逐渐增加,达到
±
α
max
(输出功率为正时为-α
max
,输出功率为负时+α
max
)后进入模态[2]。双向clllc谐振变换器正向输出时模态[1]为a-b阶段,双向clllc谐振变换器反向输出时模态[1]为a
’‑
b’阶段。
[0074]
步骤s120,当所述移相角等于预设的最大移相角时,采用半桥频率调制模态增加工作频率,以增加所述输出功率。
[0075]
具体地,如图6所示,比对当前工作频率wn和最大工作频率w
max
,判断当前工作频率是否小于最大工作频率,若否,则进入下一阶段;若是,则采用半桥频率调制模态增大工作频率,每次增大一个工作频率单位δwn,直至当前工作频率等于最大工作频率,进入下一阶段。
[0076]
示例性地,图9中,半桥频率调制模态对应图9中的模态[2],即b-c阶段或b
’‑
c’阶段,双向clllc谐振变换器正向输出时模态[2]为b-c阶段,双向clllc谐振变换器反向输出时模态[2]为b
’‑
c’阶段。此时,移相角达到
±
α
max
后保持不变,转而调节工作频率,输出功率随工作频率w的增加而增加,直到工作频率达到w
max
进入下一阶段。
[0077]
步骤s130,当所述工作频率等于预设的最大工作频率时,将所述双向clllc谐振变换器切换至全桥工作模式,所述全桥工作模式工作点的所述工作频率为预设的最小工作频率,所述移相角为预设的移相角切换值。
[0078]
具体地,判断双向clllc谐振变换器的当前工作模式,若为全桥工作模式fb,则结束调节过程;若为半桥工作模式hb,则先计算移相角切换值αe,然后将双向clllc谐振变换器切换至全桥工作模式,其中,将当前工作频率切换至全桥工作模式工作点对应的最小工作频率w
min
,当前移相角切换至全桥工作模式工作点对应的移相角切换值αe。
[0079]
示例性地,图9中,半桥工作模式切换至全桥工作模式对应图9中的hb(half bridg,半桥)
→
fb(full bridge,全桥)过程,即c-d阶段或c
’‑
d’阶段,双向clllc谐振变换器正向输出时为c-d阶段,双向clllc谐振变换器反向输出时为c
’‑
d’阶段。切换为全桥工作模式运行,全桥工作模式工作点为(w
min
,αe),移相角切换值αe的取值遵循输出功率相等的原
则,而且αe<α
max
。
[0080]
步骤s140,基于所述移相角切换值采用全桥移相调制模态增加所述移相角,以增加所述输出功率。
[0081]
具体地,判断当前移相角α是否小于最大移相角α
max
,若否,则进入全桥频率调制模态;若是,则采用全桥移相调制模态增大移相角,每次增大一个移相角单位δα,直至移相角等于最大移相角,进入全桥频率调制模态。
[0082]
示例性地,图9中,全桥移相调制模态对应图9中的模态[3],即d-e阶段或d
’‑
e’阶段,双向clllc谐振变换器正向输出时模态[3]对应d-e阶段,双向clllc谐振变换器反向输出时模态[3]对应d
’‑
e’阶段。从移相角切换值逐渐增大移相角,直至达到最大移相角,进入模态[4]。
[0083]
步骤s150,当移相角等于所述最大移相角时,基于所述最小工作频率采用全桥频率调制模态增加所述工作频率,以增加所述输出功率至给定功率。
[0084]
具体地,判断当前工作频率wn是否小于最大工作频率w
max
,若否,则表示输出功率达到给定功率,结束调节过程;若是,则采用全桥频率调制模态增大工作频率,每次增大一个工作频率单位δwn,直至当前工作频率等于最大工作频率,此时输出功率达到给定功率,结束调节过程。
[0085]
图9中,横坐标为归一化频率,纵坐标为归一化输出功率,在a
→b→c→d→e→
f调节过程或a
’→b’→c’→d’→e’→
f’调节过程中,输出功率从0逐渐增加。
[0086]
步骤s210,如图8所示,当所述控制模式为减小所述双向clllc谐振变换器的输出功率时,采用全桥频率调制模态减小工作频率,以减小所述输出功率。
[0087]
具体地,如图6所示,比对当前工作频率wn和最小工作频率w
min
,判断当前工作频率是否大于最小工作频率,若否,则进入下一阶段;若是,则采用全桥频率调制模态减小工作频率,每次减小一个工作频率单位δwn,直至当前工作频率等于最大工作频率,进入下一阶段。
[0088]
图9中,f
→e→d→c→b→
a调节或f
’→e’→d’→c’→b’→
a’调节过程中输出功率逐渐减小,具体调节过程与a
→b→c→d→e→
f调节过程或a
’→b’→c’→d’→e’→
f’调节过程相反,在此不再赘述。
[0089]
步骤s220,当所述工作频率等于最小工作频率时,采用全桥移相调制模态减小所述移相角,以减小所述输出功率。
[0090]
具体地,判断双向clllc谐振变换器的当前工作模式,若为半桥工作模式hb,则结束调节过程;若为全桥工作模式fb,则先计算移相角切换值αe。判断当前移相角α是否大于移相角切换值αe,若否,则进入切桥阶段;若是,则采用全桥移相调制模态减小移相角,每次减小一个移相角单位δα,直至移相角等于移相角切换值αe,进入切桥阶段。
[0091]
步骤s230,当所述移相角等于所述移相角切换值时,将所述双向clllc谐振变换器切换至半桥工作模式,所述半桥工作模式工作点的所述工作频率为最大工作频率,所述移相角为最大移相角。
[0092]
具体地,将双向clllc谐振变换器切换至半桥工作模式,其中,将当前工作频率切换至半桥工作模式工作点对应的最大工作频率w
max
,当前移相角切换至半桥工作模式工作点对应的最大移相角α
max
。
[0093]
步骤s240,基于所述最大工作频率采用半桥频率调制模态减小所述工作频率,以减小所述输出功率。
[0094]
具体地,判断当前工作频率wn是否大于最小工作频率w
min
,若否,则进入半桥移相调制模态;若是,则采用半桥频率调制模态减小工作频率,每次减小一个工作频率单位δwn,直至当前工作频率等于最小工作频率,进入半桥移相调制模态。
[0095]
步骤s250,当所述工作频率等于最小工作频率时,基于所述最大移相角采用半桥移相调制模态减小所述移相角,以减小所述输出功率至所述给定功率。
[0096]
具体地,判断当前移相角α是否大于0,若否,则结束调节过程;若是,则采用半桥移相调制模态减小移相角,每次减小一个移相角单位δα,直至移相角等于0,此时输出功率达到给定功率,结束调节过程。
[0097]
本实施例中,当增大双向clllc谐振变换器的输出功率时,依次通过半桥移相调制模态、半桥频率调制模态、半桥工作模式切换至全桥工作模式、全桥移相调制模态和全桥频率调制模态进行调节。对应地,当减小双向clllc谐振变换器的输出功率时,依次通过全桥频率调制模态、全桥移相调制模态、全桥工作模式切换至半桥工作模式、半桥频率调制模态和半桥移相调制模态进行调节。各个环节相互衔接,在各个调节环节中,输出功率仅与单一变量(工作频率或移相角)相关,并且明确了半桥工作模式和全桥工作模式切换时的工作点,能够实现输出功率正反向平滑无中断调节,同时充分发挥各个调制模态的调节能力,使得输出功率最大化且线性连续可调。并且,在全桥工作模式或半桥工作模式下,当调节工作频率无法对输出功率进行有效调节,即双向clllc谐振变换器轻载时,采用移相调制模态来调节输出功率,输出功率跟随移相角的变化而变化,不受工作频率的影响,当移相角为0时,输出功率为0,解决了输出功率不能到零和轻载时增益不可控的问题,扩大了调压范围。并且,相较于现有技术,本发明仅采用了移相调制模态和频率调制模态,不涉及pwm调占空比模态,不会引入大量的次生谐波和无功电流震荡,避免了功率急剧上升和效率大幅下降。
[0098]
可选地,还包括:
[0099]
获取所述给定功率和所述双向clllc谐振变换器反馈的输出功率;
[0100]
确定所述给定功率和所述输出功率之间的误差量,并将所述误差量和最大调节分辨率进行对比,其中,所述最大调节分辨率为所述移相角或所述工作频率调节一个最小单位时对应的输出功率的最大变化量;
[0101]
根据对比结果和所述误差量的方向确定所述控制模式。
[0102]
具体地,给定功率减去反馈的输出功率作为调节指令给到控制环节,控制环节需要做出调节是否到位的判断,其判断的依据就是误差量δp是否在最大调节分辨率的范围内,图6中的p_"hyesteresis"就是最大调节分辨率。最大调节分辨率定义为移相角或工作频率调节一个最小单位时输出功率的最大变化量。当误差量小于或等于最大调节分辨率时,表示输出功率已调节到位,可结束调节过程;若误差量大于最大调节分辨率,表示输出功率未调节到位,需要结合误差量的方向确定输出功率的调节方向,该调节方向指输出功率是向增大自身的方向调节,还是减小自身的方向调节。
[0103]
可选地,所述根据对比结果和所述误差量的方向确定所述控制模式包括:
[0104]
当所述误差量大于所述最大调节分辨率,且所述误差量为正向时,所述控制模式为增大双向clllc谐振变换器的输出功率;
[0105]
当所述误差量大于所述最大调节分辨率,且所述误差量为负向时,所述控制模式为减小双向clllc谐振变换器的输出功率。
[0106]
具体地,如果调节未到位,控制系统要判断此时的误差量的方向,如果为负表示给定小于反馈,功率应向着给定的方向也就是减小自身的方向调节,即控制模式为减小双向clllc谐振变换器的输出功率;如果为正表示给定大于反馈,功率应向着给定的方向也就是增大自身的方向调节,即控制模式为增大双向clllc谐振变换器的输出功率。
[0107]
可选地,如图11所示,所述获取所述给定功率和所述双向clllc谐振变换器反馈的输出功率之后,还包括:根据所述给定功率的方向确定所述移相角的调节方向和所述最大移相角的方向。
[0108]
具体地,给定功率包含方向和模值两个部分,若给定功率为正向,即给定功率大于或等于0时,则移相角的调节方向和最大移相角的方向为负向,移相角单位和最大移相角均小于0;若给定功率为负向,即给定功率小于0时,则移相角的调节方向和最大移相角的方向为正向,移相角单位和最大移相角均大于0。该移相角的调节方向和最大移相角的方向用于表示移相角是向增大自身的方向调节(即移相角单位δα的符号为正),还是减小自身的方向调节(即移相角单位δα的符号为负)。
[0109]
可选地,所述移相角的工作区间为[-2pi/5,+2pi/5],所述工作频率的工作区间为其中,且k>1,lm为所述双向clllc谐振变换器的原边励磁电感,lr为所述双向clllc谐振变换器的原边谐振电感。
[0110]
具体地,为了满足控制单调性的要求,双向clllc谐振变换器正向输出时移相角α的取值范围是[-2pi/5,0],双向clllc谐振变换器反向输出时移相角α的取值范围是[0,2pi/5]。
[0111]
结合图12,基波输出功率与移相角α正相关,即:po1
∝
sin(α),
[0112]
其中,
∝
表示正相关,移相角α接近
±
pi/2,调节移相角α获得的输出功率增量越小并最终趋于0,当移相角大于
±
pi/2时控制不再单调。为了保证控制的单调性,移相角的最大值不能太接近
±
pi/2。优选地,令
±
α
max
=
±
2pi/5,α=2pi/5时输出功率达到峰值(α=pi/2)的95.1%,意味着实现了95.1%潜在的移相角调节能力,同时避免工作于接近
±
pi/2的场合,也兼顾线性调节的需要。因此移相角α实际调节区间取[-2pi/5,2pi/5]。
[0113]
基波指的是v
sw
的一次谐波分量,此外还有3rd、5rd、7rd等谐波分量,但相比一次谐波而言幅度都很小,根据经典的fha分析法,忽略除基波之外的分量,这里v
sw
简单等效为仅含有基波分量的正弦波,那么输出功率po也可以等同于基波输出功率po1,即:po≈po1。
[0114]
可选地,所述双向clllc谐振变换器的原边谐振电感和谐振电容满足第九公式,第九公式包括:
[0115][0116]
其中,α
max
为最大移相角;w
n_max
为所述最大工作频率;r
load
为负载电阻;m
aim
为预设的目标增益;n为变压器匝数;cr为所述双向clllc谐振变换器的谐振电容;lr为所述双向clllc谐振变换器的原边谐振电感;k为所述双向clllc谐振变换器的原边励磁电感与原边谐振电感的比值;所述双向clllc谐振变换器的原边谐振电感的感值等于副边谐振电感的
感值。
[0117]
需要说明的是,由于双向clllc谐振变换器不仅能正向输出,还能反向输出,正向输出时的原边对应反向输出时的副边,正向输出时的副边对应反向输出时的原边。
[0118]
示例性地,以双向车载dc/dc变换器为例,双向clllc谐振变换器中各个参数可优选如下数值,正向额定充电功率15kw,负向额定放电功率10kw。原边输入电压400v,副边输出最高电压480v,谐振频率fr=100khz。lr=10μh;cr=255nf;lm=100μh;n=1;正、负向目标增益m
aim
分别为1.2、0.833;正向运行时w
n_min
取0.6,α
max
取负向运行时w
n_min
取0.6,α
max
取w
n_max
=0.8;正向αe=0.132π≈0.417,负向αe=-0.108π≈-0.339。
[0119]
本可选的实施例中,采用如上所述的数值能够保证双向clllc谐振变换器有足够的功率输出能力。
[0120]
为了实现图9控制模态,需要满足两个条件:
[0121]
1、c点的输出功率等于d点的输出功率,或c’点的输出功率等于d’点的输出功率。
[0122]
2、c点的输出功率小于e的输出功率,或c’点的输出功率小于e’点的输出功率。
[0123]
已知全桥工作模式同等条件下输出功率为半桥工作模式下的4倍,结合以上两个条件,[w
min
,w
max
]满足第一公式,第一公式包括:
[0124][0125]
其中,w
max
表示最大工作频率,w
min
表示最小工作频率。
[0126][0127]wmax
<1保证了双向clllc谐振变换器一次侧的zvs(zero voltage switching,零电压开通)零电压开通,和二次侧的零电流关断,在归一化频率处变换器存在一个增益极点,只有高于且低于1的区域才能实现输出的单调可调。工程上,lm一般远比lr大,对应k必然大于1。一般k越大,增益范围也越大,但k过大也会造成控制失去单调性,按照一般工程经验,k可根据实际负载情况在{1,10}之间取值,以k=6为例结合第一公式得到以下几种可能的组合,见表1所示。
[0128]
表1:k和工作频率上、下限的选择
[0129]
[0130][0131]
可见为了确保控制过程的单调性,w
min
至少应该大于:
[0132][0133]
当w
min
越大,w
max
的取值也越大,同时输出功率也越大,相对应的工作频带(w
max-w
min
)宽度减小。{w
min
,w
max
}实际设计没有最优解,原则上满足输出功率峰值需求的条件下尽可能也具有宽的工作频带。
[0134]
关于第一公式的推导如下:c点的输出功率小于e的输出功率,或c’点的输出功率小于e’点的输出功率,则w
min
和w
max
的取值满足第二公式,第二公式包括:po1_hb(w
max
,
±
α
max
)<po1_fb(w
min
,
±
α
max
),
ꢀꢀꢀꢀꢀ
(公式二)
[0135]
其中,po1_hb(w
max
,
±
α
max
)指半桥工作模式中c点或c’点的基波输出功率,po1_fb(w
min
,
±
α
max
)功率指全桥工作模式中e点或e’点处的基波输出功率。
[0136]
其中,全桥工作模式下输出功率满足第三公式,第三公式包括:
[0137][0138]
其中,po1_fb(wn,α)表示全桥工作模式中(wn,α)点处的基波输出功率,p0表示输出功率,wn表示工作频率,α表示移相角,n表示变压器变比,k为上文中确定的值,半桥工作模式母线电压利用率仅为全桥的一半,对应同等条件下输出功率为全桥时的1/4,即如第四公式所示:
[0139][0140]
其中,po1_hb(wn,α)表示半桥工作模式中(wn,α)点处的基波输出功率,半桥工作模式下输出功率满足第五公式,第五公式包括:
[0141][0142]
其中,n为变压器变比。k,m,wn,p0定义如下:
[0143][0144]
其中,lm为一次侧励磁电感,正向时lr为一次侧谐振电感lr1,cr为一次侧谐振电容cr1,反向时lr为二次侧谐振电感lr2,cr为二次侧谐振电容cr2,vdc_in为一次侧电源电压,vdc_out为二次侧的电源电压,z0为无符号量。根据第二公式、第四公式可得到第六公式,第六公式包括:
[0145][0146]
根据第三公式、第五公式和第六公式,可得到第一公式:
[0147][0148]
可选地,在所述将所述双向clllc谐振变换器切换值全桥工作模式,或所述采用全桥移相调制模态调节所述移相角之前,还包括:
[0149]
基于输出功率相等原则,根据所述最小工作频率、所述最大工作频率和所述最大移相角确定所述移相角切换值,且所述移相角切换值小于所述最大移相角。
[0150]
具体地,移相角αe的取值遵循输出功率相等的原则,采用第七公式表示,第七公式包括:
[0151]
po1_fb(w
min
,
±
αe)=po1_hb(w
max
,
±
α
max
),
ꢀꢀꢀꢀꢀꢀ
(公式七)
[0152]
其中,po1_hb(w
max
,
±
α
max
)指半桥工作模式中c点或c’点的基波输出功率,po1_fb(w
min
,
±
αe)功率指全桥工作模式中d点或d’点处的基波输出功率。
[0153]
根据公式第三公式、第五公式和第一公式可得到αe的关系表达式,由第八公式表示,第八公式包括:
[0154][0155]
以表1的序号3作为优选实施例:k=6,w
min
=0.5,w
max
取0.8(0.5<w
max
<0.866),α
max
=2*pi/5,带入第八公式中得到:
[0156]
αe=0.673<2*pi/5,
[0157]
因此,只要0.5<w
max
<0.866,半桥工作模式切换至全桥工作模式时αe始终小于
±
2pi/5,根据图10,输出功率与αe呈正相关,半桥工作点c处的输出功率始终小于全桥工作点e处的输出功率,半桥工作点c’处的输出功率始终小于全桥工作点e’处的输出功率,从而保证了始终存在一个小于2pi/5的αe实现输出功率在全桥d点和半桥c点之间,以及全桥d’点和半桥c’点的平滑切换。
[0158]
本可选的实施中,模态[3](d-e,或d
’‑
e’)的移相环节衔接模态[2](e-f,或e
’‑
f’)和模态[4](c-d,或c
’‑
d’)两个调频环节,保证了输出功率连续可调,同时,模态[1](a-b,或a
’‑
b’)输出到0的特性为变换器的软起动和正反向运行创造了条件。
[0159]
可选地,所述半桥移相调制模态和所述全桥移相调制模态中,所述输出功率与所述移相角之间呈连续单调关系;所述半桥频率调制模态和所述全桥频率调制模态中,所述输出功率与所述工作频率之间呈连续单调关系。
[0160]
具体地,在输出功率由0开始增大时,首先工作在半桥工作模式(a-b-c,或a
’‑b’‑
c’),半桥工作模式下存在两种调制模式,分别是移相角调制模式(ppm)和频率调制模式(pfm),两者在b/b’点处衔接,全桥工作模式下类似也存在这两种调制模式,它们在e/e’点处衔接。在本发明选择的频率和移相角调节范围内,输出功率与频率、移相角都呈连续单调关系,因此b/b’和e/e’衔接点处不存在输出功率不连续的问题。
[0161]
本发明的技术方案,提出了双向clllc谐振变换器的pfm(pulse frequency modulation,脉冲频率调节)、ppm(pulse phase modulation脉冲移相角调节)和hb/fb(half bridge/full bridge,半桥/全桥)切换三种调节方式,融合以功率流作为反馈的控制方法,能够实现变换器的软起动、软关断和软幻想,以功率流作为反馈进行控制,实现了功率流的正反向平滑线性调节。占空比恒定为50%,通过pfm、ppm和hb/fb切换相互衔接的方式最大化扩展了输出功率的范围,轻载时工作在半桥工作模式,重载时工作在全桥工作模式,实现了半桥工作模式和全桥工作模式之间的平滑衔接,有效提高重载输出能力的同时,降低了环流,提高了效率。在调节工作频率无法有效调节输出功率时,采用移相角调节方法调节输出功率,能够解决双向clllc谐振变换器轻载不可控的问题,相较于传统方案中轻载工作在间歇模式的方案,能够实现轻载可控且高分辨率控制。
[0162]
为了对本发明的双向clllc谐振变换器控制方法做进一步的说明,下面以15kw的双向车载obc充电器为例对上述控制方法进行仿真验证,其中,仿真参数如表2所示。
[0163]
表2仿真参数表
[0164]
参数值额定功率
±
15kw电源vdc_in、vdc_out240v负载rload1、rload2100ohm负载并联电容100uf一次侧mosfet、二次侧mosfet理想开关模型谐振电容cr1、cr2405nf谐振电感lr1、lr225uh励磁电感lm150uhk6fr、wr50khz、2*pi*frn变压器变比1ki,kp0.0032,0.002
[0165]
谐振点频率设计为50khz,那么变换器工作频率的上限fsw_max为0.8*50khz=40khz;下限fsw_min为0.5*50khz=25khz。为了确保正反向输出时对向电源不会对输出造
成影响,一次侧和二次侧的电源各串连一只理想二极管。另外,功率管可均为理想开关,例如电感、电容均忽略其寄生效应。
[0166]
pset为功率给定信号,po_fw为正向输出功率,po_fb为反向输出功率,单位kw。给定分为四段:0-0.2s时间段为-15kw,0.2s-0.5s时间段内为0,0.5s-0.7s时间段内为15kw,0.7s-1s时间段内为0。第一阶段(0-0.2s)时,po_fw正向功率在控制电路的作用下跟踪给定信号,直到正向输出稳定在15kw为止。第二阶段(0.2s-0.5s)为反向到正向输出的过渡阶段,该阶段po_fw在控制环的作用下逐渐减小至0。第三阶段(0.5s-0.7s)时,po_fb在控制电路的作用下跟踪给定信号,完整的0
→‑
15kw
→0→
15kw四段控制过程平滑且无超调,调节时间约0.1s。
[0167]
给定第一阶段:包含四个模态,分别为mod1,mod2,mod3,mod4,四个模态的衔接顺序为mod1
→
mod2
→
mod3
→
mod4,见图12和图13。vhb_phase、vfb_phase分别为半桥移相角和全桥移相角,vhb_phase、vfb_phase为正表示一次侧滞后于二次侧,为负表示一次侧超前于二次侧。vhb_frequency表示半桥工作频率,单位hz。vhb_frequency表示全桥工作频率,单位hz。
[0168]
模态[1](mod1:vmod1=1)
[0169]
vhb_phase从0开始增大到0.2,方波模块的delay输入1表示移相角度2*pi,0.2代表2pi/5。在此阶段,半桥工作频率维持25khz不变。
[0170]
模态[2](mod2:vmod2=1)
[0171]
vhb_phase稳定在0.2,也即2pi/5不变。在此阶段,半桥工作频率从25khz在控制器的作用下开始上升,至40khz结束。
[0172]
模态[3](mod3:vmod3=1)
[0173]
半桥工作点到达(40khz,2pi/5)时切换为全桥。切换到全桥的工作频率用vfb_frequency表示,为75khz,切换到全桥的移相角αe经控制器计算得出。功率继续增大,全桥移相角vfb_phase从αe→
2pi/5调节的过程中保持vfb_frequency不变。
[0174]
模态[4](mod4:vmod4=1)
[0175]
全桥移相角vfb_phase达到2pi/5后保持不变,转为调节vfb_phase,到达功率给定点位置后维持工作频率,最终工作频率稳定在30khz附近。
[0176]
给定第二阶段:包含四个模态,分别为mod1,mod2,mod3,mod4,四个模态的衔接顺序为mod4
→
mod3
→
mod2
→
mod1,见图14。
[0177]
模态[4](mod4:vmod4=1)
[0178]
0.4s时给定从-15kw
→
0,此时变换器工作在模态4,衔接上面的图13,vfb_frequency在控制器的作用下从约30khz开始降低至25khz,在此过程中保持vfb_phase=0.2不变。
[0179]
模态[3](mod3:vmod3=1)
[0180]
当vfb_frequency=25khz时维持不变,转为调节移相角,vhb_phase在控制器的作用下从0.2
→
αe。
[0181]
模态[2](mod2:vmod2=1)
[0182]
全桥工作点到达(75khz,αe)切换为半桥工作模式工作。半桥切换点工作频率为40khz,切换点移相角2pi/5。当功率继续减小,半桥工作频率在控制器的作用下从40khz
→
25khz调节,在此过程中保持移相角不变。
[0183]
模态[1](mod1:vmod1=1)
[0184]
半桥工作频率达到25khz后保持不变,转为调节移相角,直至输出功率归0为止。
[0185]
给定第三阶段:移相角为负,其他与第一阶段类似,不再赘述,见图15:
[0186]
给定第四阶段:移相角为负,与第二阶段类似不再赘述,见图16。
[0187]
将k=6、w
min
=0.5,w
max
=0.8带入第八公式得移相角切换值αe=0.163,通过仿真对结果的切桥瞬间进行局部放大,见图17和图18,其中图17中变换器在hb_fb下降沿处从半桥工作模式切换到全桥工作模式,其中图18中变换器在hb_fb上升沿处从全桥工作模式切换到半桥工作模式。可见,切换前后输出功率保持连续变化。
[0188]
如图19所示,正向功率po_fw减po_fb得到变换器在任何时刻的输出功率净值,可见在0s时刻,输出功率净值从0开始连续增长,实现了软起动;换向时,正向功率连续下降到0然后反向功率开始连续增长,实现了软换向;2s时刻反向功率归0实现软关机。
[0189]
本发明另一实施例提供的一种电子设备包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现如上所述的双向clllc谐振变换器控制方法。
[0190]
本发明又一实施例提供的一种计算机可读存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如上所述的双向clllc谐振变换器变模态控制方法。
[0191]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,可以通过计算机程序来指令相关硬件来完成,所述程序可存储于一计算机可读取存储介质中。所述存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
[0192]
虽然本发明公开披露如上,但本发明公开的保护范围并非仅限于此。本领域技术人员在不脱离本发明公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1