码头装卸运输船载门座起重机旋转机构的改进控制电路的制作方法
1.本实用新型涉及电动机控制技术领域,特别涉及码头装卸运输船载门座起重机旋转机构的改进控制电路。
背景技术:
2.码头装卸运输船载门座起重机是港口码头装卸运输船的重要装卸机械设备,该设备包括变幅机构、起升机构、旋转机构和行走机构四部分,其中的变幅机构是用于改变门座起重机臂架幅度变化的机构,起升机构是用于改变吊钩位置的机构,旋转机构是用于改变门座起重机臂架转动方位的机构,行走机构是用于改变门座起重机位置的机构。
3.门座起重机的操作人员通过操作控制台上的控制手柄或者联动台向各个机构发出控制指令,通过plc的控制逻辑将控制指令传输给相应驱动机构的电动机来实现各个机构的动作。在装卸货物的作业过程中,需要臂架频繁地改变起吊点和卸载点,这就使得旋转机构较其他机构更加频繁地工作。由于门座起重机的这一工作特点,使得门座起重机在使用过程中存在下列情况:
4.1.由于旋转机构电路中的接触器的频繁启停,使得这些接触器的吸合机构磨损,从而导致触点粘连情况;
5.2.变幅机构、起升机构和行走机构原设计都为变频器控制输出控制,而旋转机构原设计则采用接触器切换电阻启停控制方式控制,如图1和图2所示。因门座起重机的臂架在左右旋转运行时需要接触器的频繁启停,从而导致接触器的电磁线圈由于操作过电压运行,使其在运行3个月时间左右就会发生将接触器的电磁线圈烧毁的故障情况,或者使其接线端子由于过电压粘连而发生短路故障情况。
6.针对这种故障情况,只有在更换了接触器的电磁线圈或接线端子及其连接电缆后,才能恢复正常运行。
7.由于旋转机构控制电路中接触器的频繁启停,致使接触器线圈、接线端子及其连接电缆的使用寿命极短,这就大大增加了门座起重机的故障率和事故率,这不仅极大地增加了维护和维修成本,还严重地影响码头的吊装作业需求和增加设备运行中事故发生的概率。
8.这些因素的存在给门座起重机的稳定运行,带来较大的安全事故隐患。据统计目前全国类似这样的在用设备约有上千部(台)以上,由于这种状况所造成的安全生产事故每年达上百起之多,所造成的直接经济损失保守估算也在数百万元以上。
技术实现要素:
9.针对码头装卸运输船载门座起重机旋转机构原设计接触器切换电阻启停控制方式,因门座起重机在左右旋转作业时接触器的频繁启停,导致接触器的电磁线圈、接线端子及其连接电缆操作过电压所造成的损失,本实用新型的目的在于提供一种码头卸运输船载门座起重机旋转机构的改进控制电路,以消除频繁启动接触器带来的过电压。为实现上述
目的本实用新型是通过以下技术方案实现的:
10.一种码头装卸运输船载门座起重机旋转机构的改进控制电路,其控制电路从电源经过包括六条回路:
11.第一回路组成为从电源ac220v一端连接plc控制第一输出点
‑
c13k9,再顺序连接第二接触器的常闭辅助触点k2后,再连接第一接触器线圈
‑
k1后连接电源ac220v另一端;当plc控制第一输出点
‑
c13k9闭合时,第一接触器线圈
‑
k1 得电使得主回路中的第一接触器吸合,从而控制旋转机构左向旋转运行;
12.第二回路组成为从电源ac220v一端连接plc控制第二输出点
‑
c13k10,再顺序连接第一接触器的常闭辅助触点k1后,再连接第二接触器线圈
‑
k2后连接电源ac220v另一端;当plc控制第二输出点
‑
c13k10闭合时,第二接触器线圈
‑
k2 得电使得主回路中的第二接触器吸合,从而控制旋转机构右向旋转运行;
13.第三回路组成为从电源ac220v一端连接plc控制第三输出点
‑
c13k12,再顺序连接第三接触器线圈
‑
k3后连接电源ac220v另一端;当plc控制第三输出点
‑
c13k12闭合时,第三接触器线圈
‑
k3得电使得主回路中的第三接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1,从而控制旋转机构实现加速1运行;
14.第四回路组成为从电源ac220v一端连接plc控制第四输出点
‑
c13k13,再顺序连接第四接触器线圈
‑
k4后连接电源ac220v另一端;当plc控制第四输出点
‑
c13k13闭合时,第四接触器线圈
‑
k4得电使得主回路中的第四接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1和第二级电阻
‑
r1
‑
2,从而控制旋转机构实现加速2运行;
15.第五回路组成为从电源ac220v一端连接plc控制第五输出点
‑
c13k14,再顺序连接第五接触器线圈
‑
k5后连接电源ac220v另一端;当plc控制第五输出点
‑
c13k14闭合时,第五接触器线圈
‑
k5得电使得主回路中的第五接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1、第二级电阻
‑
r1
‑
2和第三级电阻
‑
r1
‑
3,从而控制旋转机构实现加速3运行;
16.第六回路组成为从电源ac220v一端连接plc控制第六输出点
‑
c13k15,再顺序连接第六接触器线圈
‑
k6后连接电源ac220v另一端;当plc控制输第六出点
‑
c13k15闭合时,第六接触器线圈
‑
k6得电使得主回路中的第六接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1、第二级电阻
‑
r1
‑
2、第三极电阻
‑
r1
‑
3和第四级电阻
‑
r1
‑
4,从而控制旋转机构实现加速4运行;
17.在所述控制电路的第一回路的第一接触器线圈
‑
k1处并联一个第一rzr
‑
2阻容吸收模块r
‑
1;
18.在所述控制电路的第二回路的第二接触器线圈
‑
k2处并联一个第二rzr
‑
2阻容吸收模块r
‑
2;
19.在所述控制电路的第三回路的第三接触器线圈
‑
k3处并联一个第三rzr
‑
2阻容吸收模块r
‑
3;
20.在所述控制电路的第四回路的第四接触器线圈
‑
k4处并联一个第四rzr
‑
2阻容吸收模块r
‑
4;
21.在所述控制电路的第五回路的第五接触器线圈
‑
k5处并联一个第五rzr
‑
2阻容吸收模块r
‑
5;
22.在所述控制电路的第六回路的第六接触器线圈
‑
k6处并联一个第六rzr
‑
2阻容吸
收模块r
‑
6。
23.这样改造之后,能够有效抑制操作过电压的瞬间振荡和高频电流,使过电压的波形变缓,陡度和幅值降低,再加上rzr
‑
2阻容吸收模块的阻尼作用,使高频振荡迅速衰减,并且吸收和消耗电路断开时感性负载产生的自感电动势,能够防止过电压造成的负载绝缘击穿。从而消除了电路中存在的安全隐患。经长期试验的检验证明,这种改进方法在实践中行之有效,减小干扰,延长接点的寿命。避免了运行3个月左右就将接触器的电磁线圈烧毁的情况,能够使接触器的使用寿命延长至三年以上,也能够使接触器端子的使用寿命延长至五年以上,减小了门座起重机的故障率,满足了码头吊装作业需求,减小了故障率和维护维修成本。
24.采用本实用新型技术方案只需增加rzr
‑
2阻容吸收模块。改造后增加的 rzr
‑
2阻容吸收模块费用为720元/组;原接触器维修周期为一次/3个月;材料费及维修费用4.8万元/组。改造完后接触器维修周期延长至少一次/三年,单台可以节省57.5万元/三年。如果国内现在使用的千台同类设备都采用该技术方案改造,不仅能够大大提高设备使用率降低事故率,还可以节约大量维修费用和人工成本,取得较好的改造效果,每三年能够节省费用57000.5万元。
附图说明
25.图1是码头装卸运输船载门座起重机旋转机构主控制回路电路图;
26.图2是码头装卸运输船载门座起重机旋转机构的控制电路图;
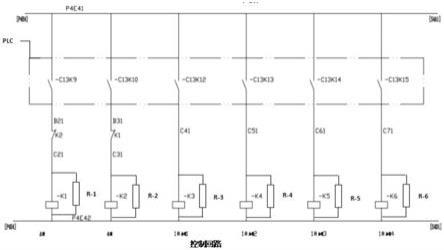
27.图3是本实用新型控制电路图。
具体实施方式
28.下面结合附图和具体实施例详细说明本实用新型。
29.本实用新型的一种码头装卸运输船载门座起重机旋转电机改进控制电路,图1所示是码头装卸运输船载门座起重机旋转机构主控制回路电路图;如图3 所示,其控制电路从电源经后包括六条回路:
30.第一回路组成为从电源ac220v一端连接plc控制第一输出点
‑
c13k9,再顺序连接第二接触器的常闭辅助触点k2后,再分别连接第一接触器线圈
‑
k1和第一rzr
‑
2阻容吸收模块r
‑
1后连接电源ac220v另一端;当plc控制第一输出点
ꢀ‑
c13k9闭合时,这时第一rzr
‑
2阻容吸收模块r
‑
1吸收了过电压,从而避免第一接触器线圈
‑
k1受到过电压影响(干扰),使第一接触器线圈
‑
k1得电,主回路中的第一接触器吸合,从而控制旋转机构左向旋转运行。
31.第二回路组成为从电源ac220v一端连接plc控制第二输出点
‑
c13k10,再顺序连接第一接触器的常闭辅助触点k1后,再分别连接第二接触器线圈
‑
k2和第二rzr
‑
2阻容吸收模块r
‑
2后连接电源ac220v另一端;当plc控制第一输出点
‑
c13k10闭合时,这时第二rzr
‑
2阻容吸收模块r
‑
2吸收了过电压,从而避免第二接触器线圈
‑
k2受到过电压影响(干扰)。使第二接触器线圈
‑
k2得电,主回路中的第二接触器吸合,从而控制旋转机构右向旋转运行。
32.第三回路组成为从电源ac220v一端连接plc控制第三输出点
‑
c13k12后,再分别顺序连接第三接触器线圈
‑
k3和第三rzr
‑
2阻容吸收模块r
‑
3后连接电源 ac220v另一端;当plc控制第三输出点
‑
c13k12闭合时,这时第三rzr
‑
2阻容吸收模块r
‑
3吸收了过电压,从而
避免第三接触器线圈
‑
k3受到过电压影响(干扰),使第三接触器线圈
‑
k3得电,主回路中的第三接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1,从而控制旋转机构实现加速1运行。
33.第四回路组成为从电源ac220v一端连接plc控制第四输出点
‑
c13k13后,再分别顺序连接第四接触器线圈
‑
k4和第四rzr
‑
2阻容吸收模块r
‑
4后连接电源 ac220v另一端;当plc控制第四输出点
‑
c13k13闭合时,这时第四rzr
‑
2阻容吸收模块r
‑
4吸收了过电压,从而避免第四接触器线圈
‑
k4受到过电压影响(干扰),使其第四接触器线圈
‑
k4得电使得主回路中的第四接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1和第二级电阻
‑
r1
‑
2,从而控制旋转机构实现加速2运行。
34.第五回路组成为从电源ac220v一端连接plc控制第五输出点
‑
c13k14后,再分别顺序连接第五接触器线圈
‑
k5和第五rzr
‑
2阻容吸收模块r
‑
5后连接电源 ac220v另一端;当plc控制第五输出点
‑
c13k14闭合时,这时第五rzr
‑
2阻容吸收模块r
‑
5吸收了过电压,从而避免第五接触器线圈
‑
k5受到过电压影响(干扰),使其第五接触器线圈
‑
k5得电,主回路中的第五接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1、第二级电阻
‑
r1
‑
2和第三季电阻
‑
r1
‑
3,从而控制旋转机构实现加速3运行。
35.第六回路组成为从电源ac220v一端连接plc控制第六输出点
‑
c13k15后,再分别顺序连接第六接触器线圈
‑
k6和第六rzr
‑
2阻容吸收模块r
‑
6后连接电源 ac220v另一端;当plc控制输第六出点
‑
c13k15闭合时,这时第六rzr
‑
2阻容吸收模块r
‑
6吸收了过电压,从而避免第六接触器线圈
‑
k6受到过电压影响(干扰),使第六接触器线圈
‑
k6得电,主回路中的第六接触器吸合,切除主回路中的第一级电阻
‑
r1
‑
1、第二级电阻
‑
r1
‑
2、第三极电阻
‑
r1
‑
3和第四级电阻
‑
r1
‑
4,这时第六rzr
‑
2阻容吸收模块r
‑
6吸收了过电压,从而避免第六接触器线圈
‑
k6受到过电压影响。从而控制旋转机构实现加速4运行。
36.本实用新型解决技术问题的技术方案如下:
37.原设计为无抗接触器的电磁线圈操作过电压干扰,现改造为并接rzr
‑
2阻容吸收模块吸收了接触器的电磁线圈操作过电压,即在原控制电路中每条回路的接触器的电磁线圈两端并联一个rzr
‑
2阻容吸收模块,也即在原控制电路中的控制箱中的第一接触器线圈
‑
k1、第二接触器线圈
‑
k2、第三接触器线圈
‑
k3、第四接触器线圈
‑
k4、第五接触器线圈
‑
k5和第六接触器线圈
‑
k6处,分别并联一个第一rzr
‑
2阻容吸收模块r
‑
1、第二rzr
‑
2阻容吸收模块r
‑
2、第三rzr
‑
2 阻容吸收模块r
‑
3、第四rzr
‑
2阻容吸收模块r
‑
4、第五rzr
‑
2阻容吸收模块r
‑
5 和第六rzr
‑
2阻容吸收模块r
‑
6,从而消除了电路中存在的安全隐患。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1