一种步进电机控制模组的制作方法
1.本实用新型涉及步进电机控制领域,特别是涉及一种步进电机控制模组。
背景技术:
2.现有步进电机控制模组都是做到在硬件层面可以按脉冲个数来驱动电机转动。这就要求精准控制上位控制器的puls和dir的数量,然后通过既有的步进驱动器驱动步进电机以达到需要的旋转速度及旋转角度,请参阅图1。
3.在许多应用中,机械设计者所设计的实现的平动或转动的动力是电机,但他们并不一定懂得怎样去产生一个特定的脉冲信号去实现上位控制器中的旋转速度puls和旋转角度dir的信号。而不得不去与电路工程师组成设计团队,来共同完成设计目标。在时间上,空间上,效率上造成了损失。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种步进电机控制模组,用于解决现有技术中步进电机控制模组所存在的问题。
5.为实现上述目的及其他相关目的,本实用新型提供一种步进电机控制模组,所述步进电机控制模组包括集成设置的:
6.电源接口,所述电源接口用于外部接入第一直流电源;
7.电源模块,所述电源模块与电源接口连接,用于将第一直流电源转换为第二直流电源;
8.稳压模块,所述稳压模块与电源模块连接,用于将第二直流电源转化为第三直流电源;
9.rs485通讯模块,所述rs485通讯模块与稳压模块、外部上位机连接,用于传输modbus寄存器信号;
10.单片机模块,所述单片机模块与稳压模块、rs485通讯模块连接,用于根据modbus寄存器信号输出en使能信号、dir转角信号和pul转速信号;
11.反向器模块,所述反向器模块用于将en使能信号、dir转角信号和pul转速信号放大;
12.步进电机控制器接口,所述步进电机控制器接口与电源接口、反相器模块连接,用于根据en使能信号、dir转角信号和pul转速信号驱动电机运行。
13.于本实用新型的一实施例中,所述步进电机控制模组还包括集成设置的数据存储模块,所述数据存储模块与稳压模块、单片机模块连接,用于数据存储。
14.于本实用新型的一实施例中,所述步进电机控制模组还包括集成设置的调试接口,所述调试接口与稳压模块、单片机模块连接,用于单片机模块调试。
15.于本实用新型的一实施例中,所述步进电机控制模组还包括集成设置的alm接口,所述alm接口与步进电机控制器接口、单片机模块连接,用于将电机异常信号传输到单片机
模块。
16.于本实用新型的一实施例中,所述反向器模块包括第一反向器、第二反向器和第三反向器。
17.如上所述,本实用新型的一种步进电机控制模组,具有以下有益效果:本实用新型将各个功能模块集成于一块通用板上,上位机通过简单的modbus协议输出modbus寄存器信号到单片机模块,进而使得单片机模块输出相应的modbus寄存器信号输出en使能信号、dir转角信号和pul转速信号,实现步进电机的机械控制,并且步进电机的转动速度和转动角度等均可以随时通过上位机进行调整,从而摆脱了复杂的驱动电路和编程工作。
附图说明
18.图1显示为现有技术中公开的步进电机控制模组的工作原理图。
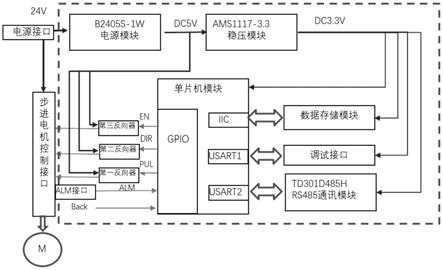
19.图2显示为本实用新型实施例中公开的步进电机控制模组的工作原理图。
20.图3显示为本实用新型实施例中公开的电源接口的电路示意图。
21.图4显示为本实用新型实施例中公开的电源模块的电路示意图。
22.图5显示为本实用新型实施例中公开的稳压模块的电路示意图。
23.图6显示为本实用新型实施例中公开的rs485通讯模块的电路示意图。
24.图7显示为本实用新型实施例中公开的单片机模块的电路示意图。
25.图8显示为本实用新型实施例中公开的第一反向器的电路示意图。
26.图9显示为本实用新型实施例中公开的第二反向器的电路示意图。
27.图10显示为本实用新型实施例中公开的第三反向器的电路示意图。
28.图11显示为本实用新型实施例中公开的步进电机控制器接口的电路示意图。
29.图12显示为本实用新型实施例中公开的数据存储模块的电路示意图。
30.图13显示为本实用新型实施例中公开的调试接口的电路示意图。
31.图14显示为本实用新型实施例中公开的alm接口的电路示意图
具体实施方式
32.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
33.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
34.请参阅图2,本实用新型提供一种步进电机控制模组,所述步进电机控制模组包括集成设置的:
35.电源接口jp1,所述电源接口jp1用于外部接入12v~24v直流电源,请参阅图3,所述电源接口jp1的第2引脚、第3引脚接入外部12v~24v直流电源,第3引脚引出12v~24v直
流电源。
36.电源模块,所述电源模块与电源接口连接,用于将12v~24v直流电源转换为5v直流电源,请参阅图4,所述电源模块包括电压转换芯片m1、电容e1、电容e2和电容e3;所述电容e1设置于电压转换芯片m1的第1引脚和第2引脚之间,所述电容e2和电容e3设置于电压转换芯片m1的第4引脚和第6引脚之间,所述电压转换芯片m1的第1引脚接入12v~24v直流电源,通过电压转换芯片m1将12v~24v直流电源转化为5v直流电源,并且通过电压转换芯片m1的第6引脚将5v直流电源输出。
37.稳压模块,所述稳压模块与电源模块连接,用于将5v直流电源转化为3.3v直流电源,请参阅图5,所述稳压模块包括稳压芯片u1、电容c3、电容c4、电容c5和电容c6;所述电容c5和电容c6设置于稳压芯片u1的第3引脚和第1引脚之间,所述电容c3和电容c4设置于稳压芯片u1的第2引脚和第1引脚之间,所述稳压芯片u1的第3引脚接入5v直流电源,通过稳压芯片u1将5v直流电源转化为3.3v直流电源,并且通过稳压芯片u1的第2引脚将3.3v直流电源输出。
38.rs485通讯模块,所述rs485通讯模块与稳压模块、外部上位机连接,用于传输modbus寄存器信号,请参阅图6,所述rs485通讯模块包括rs485通讯芯片u2和电容c11;所述电容c11设置于rs485通讯芯片u2的第2引脚和第1引脚之间,所述rs485通讯芯片u2的第3引脚和第4引脚(即txb和rxb)与单片机模块连接,并且所述rs485通讯芯片u2的第10引脚与外部上位机连接,通过rs485通讯芯片u2将modbus寄存器信号传输到单片机模块。
39.单片机模块,所述单片机模块与稳压模块、rs485通讯模块连接,用于根据modbus寄存器信号输出en使能信号、dir转角信号和pul转速信号,请参阅图7,所述单片机模块包括单片机芯片u3、晶振x1和晶振y1;所述晶振y1设置于单片机芯片u3的第3引脚和第4引脚之间,所述晶振x1设置于单片机芯片u3的第5引脚和第6引脚之间,所述单片机芯片u3的第12引脚和第13引脚(即txb和rxb)与s485通讯芯片u2的第3引脚和第4引脚(即txb和rxb)连接,输入modbus寄存器信号;所述单片机芯片u3的第32引脚、第11引脚以及第43引脚与反向器模块连接,输出en使能信号、dir转角信号和pul转速信号到反向器模块。
40.反向器模块,所述反向器模块用于将en使能信号、dir转角信号和pul转速信号放大,所述反向器模块包括第一反向器、第二反向器和第三反向器;请参阅图8,所述第一反向器包括场效应管q1、电阻r2和电阻r3,所述场效应管q1的栅极经过电阻r2与单片机芯片u3的第43引脚(即pwm)连接,经过电阻r3接地,所述场效应管q1漏极输出pul转速信号;请参阅图9,所述第二反向器包括场效应管q2、电阻r4和电阻r5,所述场效应管q2的栅极经过电阻r4与单片机芯片u3的第11引脚(即rl)连接,经过电阻r5接地,所述场效应管q2漏极输出dir转角信号;请参阅图10,所述第三反向器包括场效应管q3、电阻r6和电阻r7,所述场效应管q3的栅极经过电阻r6与单片机芯片u3的第32引脚(即en)连接,经过电阻r7接地,所述场效应管q3漏极输出en使能信号。
41.步进电机控制器接口jp2,所述步进电机控制器接口与电源接口、反相器模块连接,用于根据en使能信号、dir转角信号和pul转速信号驱动电机运行;请参阅图11,所述步进电机控制器接口jp2的第2引脚(即pul)接入pul转速信号,所述步进电机控制器接口jp2的第4引脚(即dir)接入dir转角信号,所述步进电机控制器接口jp2的第6引脚(即en-)接入en使能信号,所述步进电机控制器接口jp2对应相应引脚接入步进电机控制器,并且将步进
电机控制器与步进电机连接。
42.数据存储模块,所述数据存储模块与稳压模块、单片机模块连接,用于数据存储;请参阅图12,所述数据存储模块包括存储器ic1、电阻r16和电阻r17,所述存储器ic1的第5引脚经过电阻r16接地,并且与单片机芯片u3的第26引脚(即sda)连接,所述存储器ic1的第6引脚经过电阻r17接地,并且与单片机芯片u3的第25引脚(即scl)连接。
43.调试接口usatt1,所述调试接口usatt1与稳压模块、单片机模块连接,用于单片机模块调试,请参阅图13,所述调试接口usatt1的第2引脚、第3引脚与单片机芯片u3的第30引脚和第31(即txa和rxa)连接。
44.alm接口,所述alm接口与步进电机控制器接口、单片机模块连接,用于将电机异常信号传输到单片机模块,请参阅图14。
45.本实用新型的工作原理如下:
46.通过电源接口jp1接入12v~24v直流电源到电源模块进行电压转换,将12v~24v直流电源转化为5v直流电源,并且将5v直流电源接入稳压模块进行稳压处理,将5v直流电源转化为3.3v直流电源,通过5v和3.3v直流电源为模组其他模块供电;
47.模组上电后,单片机模块输出en使能信号、dir转角信号和pul转速信号到步进电机控制器,通过步进电机控制器控制步进电机,使得电机朝着顺时针方向旋转,直达给到的零点和复位信号通过back改变单片机芯片u3的第32引脚、第11引脚以及第43引脚的电压状态,与此同时,alm接口可以将步进电机异常信号传递到单片机芯片u3,使得单片机芯片u3可以做出相应控制;
48.rs485通讯模块可以将外部上位机与单片机芯片u3连接,例如将plc的modbus寄存器与单片机芯片u3连接,其中,modbus寄存器的说明请参阅表1:
49.编号寄存器说明读写状态说明1modbus当前idr/w默认值:12串口波特率r/w0:9600;1:115200:默认值03步进单位脉冲数r/w最小电机转动单位角度4正反转r/w0:正时针转动1:逆时针转动5当前电机状态r/w0:停止1:正转2:逆转6转动单位角度*个数r/w 7设定脉冲频率*1000r/w可调节电机转动速度,可设定2~200
50.表1
51.其中,根据实际机械动作,设定寄存器3和7数值分别设定电机的最小转动角度和转动速度这两个基本电机运动参数后,就可以指挥电机动作,操作如下:
52.电机正反转,寄存器4写入0或1,再写入转动角度寄存器6,电机就会做出相应的动作。当前步进电机的状态读取寄存器5,其它设定:modbus相关:寄存器1:modbus id,寄存器2:串口波特率。
53.综上可知,本实用新型将步进电机控制的复杂度简单化,利用工业上最基本的rs485通讯,就可以做到对步进电机的控制,而无需了解电机的复杂脉冲控制,提高了步进电机的使用效率。本实用新型有效克服了现有技术中的种种缺点而具高度产业利用价值。
54.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新
型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1