一种方向性无线充电车的传感网充电调度算法的制作方法
1.本发明涉及无线传感器网络技术领域,具体为一种方向性无线充电车的传感网充电调度算法。
背景技术:
2.无线功率传输(wpt)是一种通过无线信号将电能从电源传输到能量接收器的技术。最近的研究表明,节点可以通过wpt在一定距离(》10m)和一定角度范围内充电。wpt为延长无线传感器网络的寿命开辟了一个新的领域。许多学者致力于无线传感器网络中wpt技术的研究。一些工作侧重于使用静态/ 移动wcs通过wpt为节点充电。一些学者致力于研究基于wpt(wptred)的能量再分配问题,wptred可以通过节点间的能量再分配来延长整个无线传感器网络的生命周期。本发明将使用动态充电节点的网络充电与静态充电节点之间的能量再分配相结合。解决基于无线功率传输的移动充电规划问题,对于延长无线传感器网络的使用寿命,构建永久性无线传感器网络具有重要意义。
3.假设无线传感网络中的每个节点装有一个无线能量接收器、一个无线能量发送器和一个能量存储器。其中每个节点都包含一些属性,例如能量初始值,所希望达到的能量期望,满足运行的最低能量等。同样,方向性充电车包含一些属性,例如出发初始能量,保证正常工作的最低能量,移动速度,移动能耗等。充电位置集合为包含q个固定位置的坐标。每次方向性充电车从充电站出发,遍历一些充电位置,并且在这些位置上指向性的为网络中的节点充电。任务是寻找一个充电车在不同节点的和无线传感网中的能量调度,使得:调度完成后所有网络的节点均大于其能量期望;总能量损失最小;调度总时间最少。
技术实现要素:
4.本发明的目的在于提供一种方向性无线充电车的传感网充电调度算法,具备充电过程中能量损失最小,时间跨度最小,有利于延长无线传感器网络的寿命的优点,解决了调度完成后所有网络的节点均小于其能量期、总能量损失最大和调度总时间最少长的问题。
5.为实现上述目的,本发明提供如下技术方案:一种方向性无线充电车的传感网充电调度算法,包括以下步骤:
6.步骤1:指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;
7.步骤2:对充电调度方向性问题进行分解;
8.步骤3:方向性充电车分解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角构造出不同的虚拟节点,虚拟节点的数目与传输范围内
所有的节点数目正相关,且至多有q个虚拟节点;
9.步骤4:对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相统一;
10.步骤5:解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;
11.步骤6:解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;
12.步骤7:分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度。
13.优选的,所述在步骤1中,模型包含n个静态充电节点的无线传感网络,能量传输矩阵c中的元素c(i,j)表示从节点ui到节点uj的能量传递系数,该系数受很多方面的影响,例如节点间距离,环境,硬件,收集能量时的能量消耗,能量传输系数是非负的,如果两节点i和j的能量传递系数存在c(i,j) +c(j,i)》0,或者i与j为一个充电节点拆分出的虚拟节点,则i,j两节点是邻接节点。
14.优选的,所述充电集合x={x1,x2,...,xm}中的每一个元素xi表示一个固定的充电位置的坐标,并且s1步骤中的调度矩阵s=(s1,s2,...,sk)表示包含k个调项度,第i个调度集合中元素si:=(τi,si,ri)表示在集合si中的节点(包含虚拟节点和无线传感网节点)在时间τi内向集合ri中的节点传输能量。
15.优选的,所述在步骤2中,对方向性充电车调度问题、能量再分配的能量损失最小化问题(erd-egy)、能量再分配的时间最小化问题(erd-time) 进行分解。
16.优选的,所述在步骤3中,先构造特殊的静态充电节点集合v={v1,v2,...vm} 为充电节点,有着一定可以传输角度和传输范围的充电车在确定的充电节点处根据可传输范围内的无线传感网节点数目q,以范围内每个传感网节点和为充电节点的连线为角平分线可以把一个充电节点分为q个虚拟节点,其位置与充电节点在空间中的位置相同,和范围内可传输到的节点之间的传输效率和权利要求2中的传输效率要求一致,且由一个充电节点拆出的不同虚拟节点之间的传输效率为0。
17.优选的,所述在步骤4中,经过分析,首先将每个充电节点和根据方向性无线充电车的放电过程转化为无线传感网络的能量在分配过程,充电车的指向性问题转换为仅与可充电范围内的节点的能量传输系数为正,进一步与静态网络的能量在分配过程相统一,且erd-egy问题是能量传输造成的能量损失最小化和充电车移动造成的能量损失最小化两个子问题的统一。
18.优选的,所述在步骤6中,采用逐个比较的方法,按照移动路径所经过的节点数目为循环次数,每次删掉经过的一个充电位置,同时删除该充电位置衍生的所有虚拟节点,计算在每个虚拟节点和无线传感网节点的能量传输满足s5求得的时间长度的情况下,充电结束后的能量总损失若删除充电节点可以使能量损失最小化,则在分析调度序列是不考虑该节点生成的虚拟节点;循环后可以获得各个节点的能量传输最佳时间长度,使得充电过程
完成后,能量损失最小。
19.优选的,所述在步骤7中,erd-time问题的核心是给定已获得的时间长度列表t、充电车移动路径和移动时间,和冲突图g(v,e),目标是找到具有最小时间跨度的能量调度序列,使得总调度的时间跨度最小,然后依次选择待发送能量节点中,当前能量最大的节点,并且利用冲突图g将冲突节点置于能量接收状态,以此产生一个调度集合中元素。
20.优选的,所述若充电车处于移动过程中,确定调度集合中元素发送节点集合的步骤如下:(a1)将u中需要发送能量的节点中当前能量最大的节点加入到发送节点集合;(a2)将(a1)中新加入的节点的邻居节点加入到邻居节点集合;(a3)重复(a1)(a2)直到没有待分配的需要发送能量的节点。
21.优选的,所述调度集合中元素的时间长度是以下四个时间的最小值:(c1) 节点未调度时间长度变成0的最短时间;(c2)节点达到其ell的最短时间; (c3)充电车到达下一个充电位置的剩余时间;(c4)充电车在当前位置当前方向剩余充电时间。
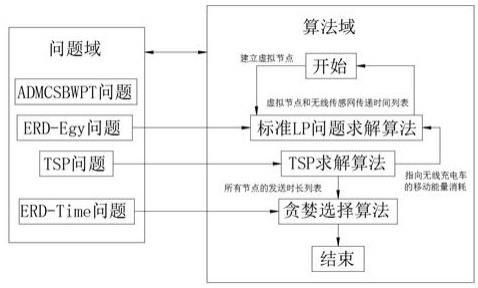
22.与现有技术相比,本发明的有益效果是:本发明通过设置建立虚拟节点,利用lp求解器获得节点能量分配的时长列表,利用成熟的解决tsp问题的算法解决方向性充电车的充电调度,最后利用贪婪选择算法设计充电节点和无线传感网节点能量的再分配过程,获得能量再分配调度与方向性充电调度并行的最终的调度序列,解决了调度完成后所有网络的节点均小于其能量期、总能量损失最大和调度总时间最少长的问题,该一种方向性无线充电车的传感网充电调度算法,具备充电过程中能量损失最小,时间跨度最小,有利于延长无线传感器网络的寿命的优点。
附图说明
23.图1为本发明系统示意图。
具体实施方式
24.下面将通过实施例的方式对本发明作更详细的描述,这些实施例仅是举例说明性的而没有任何对本发明范围的限制。
25.如图1所示,本发明提供一种技术方案:一种方向性无线充电车的传感网充电调度算法,包括以下步骤:
26.步骤1:指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;
27.步骤2:对充电调度方向性问题进行分解;
28.步骤3:方向性充电车分解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角构造出不同的虚拟节点,虚拟节点的数目与传输范围内所有的节点数目正相关,且至多有q个虚拟节点;
29.步骤4:对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相
统一;
30.步骤5:解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;
31.步骤6:解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;
32.步骤7:分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度。
33.实施例一:
34.指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;对充电调度方向性问题进行分解;方向性充电车分解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角构造出不同的虚拟节点,虚拟节点的数目与传输范围内所有的节点数目正相关,且至多有q个虚拟节点;对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相统一;解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度。
35.实施例二:
36.指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;在步骤1中,模型包含n个静态充电节点的无线传感网络,能量传输矩阵c中的元素c(i,j)表示从节点ui到节点 uj的能量传递系数,该系数受很多方面的影响,例如节点间距离,环境,硬件,收集能量时的能量消耗。能量传输系数是非负的,如果两节点i和j的能量传递系数存在c(i,j)+c(j,i)》0,或者i与j为一个充电节点拆分出的虚拟节点,则i,j两节点是邻接节点,充电集合x={x1,x2,...,
xm}中的每一个元素xi表示一个固定的充电位置的坐标,并且s1步骤中的调度矩阵 s=(s1,s2,...,sk)表示包含k个调项度,第i个调度集合中元素si:=(τi,si,ri)表示在集合si中的节点(包含虚拟节点和无线传感网节点)在时间τi内向集合ri中的节点传输能量,对充电调度方向性问题进行分解;在步骤2中,对方向性充电车调度问题、能量再分配的能量损失最小化问题(erd-egy)、能量再分配的时间最小化问题(erd-time)进行分解,方向性充电车分解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角构造出不同的虚拟节点,虚拟节点的数目与传输范围内所有的节点数目正相关,且至多有q个虚拟节点;在步骤3中,先构造特殊的静态充电节点集合v={v1,v2,...vm}为充电节点,有着一定可以传输角度和传输范围的充电车在确定的充电节点处根据可传输范围内的无线传感网节点数目q,以范围内每个传感网节点和为充电节点的连线为角平分线可以把一个充电节点分为q个虚拟节点,其位置与充电节点在空间中的位置相同,和范围内可传输到的节点之间的传输效率和权利要求2中的传输效率要求一致,且由一个充电节点拆出的不同虚拟节点之间的传输效率为0,对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相统一;解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度。
37.实施例三:
38.指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;在步骤1中,模型包含n个静态充电节点的无线传感网络,能量传输矩阵c中的元素c(i,j)表示从节点ui到节点 uj的能量传递系数,该系数受很多方面的影响,例如节点间距离,环境,硬件,收集能量时的能量消耗。能量传输系数是非负的,如果两节点i和j的能量传递系数存在c(i,j)+c(j,i)》0,或者i与j为一个充电节点拆分出的虚拟节点,则i,j两节点是邻接节点,充电集合x={x1,x2,...,xm}中的每一个元素xi表示一个固定的充电位置的坐标,并且s1步骤中的调度矩阵 s=(s1,s2,...,sk)表示包含k个调项度,第i个调度集合中元素si:=(τi,si,ri)表示在集合si中的节点(包含虚拟节点和无线传感网节点)在时间τi内向集合ri中的节点传输能量,对充电调度方向性问题进行分解;在步骤2中,对方向性充电车调度问题、能量再分配的能量损失最小化问题(erd-egy)、能量再分配的时间最小化问题(erd-time)进行分解,方向性充电车分解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角
构造出不同的虚拟节点,虚拟节点的数目与传输范围内所有的节点数目正相关,且至多有q个虚拟节点;在步骤3中,先构造特殊的静态充电节点集合v={v1,v2,...vm}为充电节点,有着一定可以传输角度和传输范围的充电车在确定的充电节点处根据可传输范围内的无线传感网节点数目q,以范围内每个传感网节点和为充电节点的连线为角平分线可以把一个充电节点分为q个虚拟节点,其位置与充电节点在空间中的位置相同,和范围内可传输到的节点之间的传输效率和权利要求2中的传输效率要求一致,且由一个充电节点拆出的不同虚拟节点之间的传输效率为0,对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相统一;解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;在步骤4中,经过分析,首先将每个充电节点和根据方向性无线充电车的放电过程转化为无线传感网络的能量在分配过程,充电车的指向性问题转换为仅与可充电范围内的节点的能量传输系数为正,进一步与静态网络的能量在分配过程相统一,且erd-egy问题是能量传输造成的能量损失最小化和充电车移动造成的能量损失最小化两个子问题的统一,解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;在步骤6中,采用逐个比较的方法,按照移动路径所经过的节点数目为循环次数,每次删掉经过的一个充电位置,同时删除该充电位置衍生的所有虚拟节点,计算在每个虚拟节点和无线传感网节点的能量传输满足s5求得的时间长度的情况下,充电结束后的能量总损失若删除充电节点可以使能量损失最小化,则在分析调度序列是不考虑该节点生成的虚拟节点;循环后可以获得各个节点的能量传输最佳时间长度,使得充电过程完成后,能量损失最小,分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度。
39.实施例四:
40.指向性充电车调度问题构造,首先给定一个方向性的充电车指向范围角度ω,初始能量e
b0
,最低能量限制e
l0
,移动速度v(m/s),移动单位长度消耗的能量(j/m),初始位置x0,以及给定的n个静态充电节点之间位置u,能量下限e
l
、初始能量eb、能量需求ee、能量传输功率p,最后寻找一个最佳的调度s,使得所有充电节点都满足能量需求,且总损失最小,而且满足需求所用的总时间τ最短;在步骤1中,模型包含n个静态充电节点的无线传感网络,能量传输矩阵c中的元素c(i,j)表示从节点ui到节点 uj的能量传递系数,该系数受很多方面的影响,例如节点间距离,环境,硬件,收集能量时的能量消耗。能量传输系数是非负的,如果两节点i和j的能量传递系数存在c(i,j)+c(j,i)》0,或者i与j为一个充电节点拆分出的虚拟节点,则i,j两节点是邻接节点,充电集合x={x1,x2,...,xm}中的每一个元素xi表示一个固定的充电位置的坐标,并且s1步骤中的调度矩阵 s=(s1,s2,...,sk)表示包含k个调项度,第i个调度集合中元素si:=(τi,si,ri)表示在集合si中的节点(包含虚拟节点和无线传感网节点)在时间τi内向集合ri中的节点传输能量,对充电调度方向性问题进行分解;在步骤2中,对方向性充电车调度问题、能量再分配的能量损失最小化问题(erd-egy)、能量再分配的时间最小化问题(erd-time)进行分解,方向性充电车分
解,对方向性充电车所处的不同充电节点xi和传输效率p的不同,其可传输能量的范围也会不同,对于每一个范围内所有无线传感网节点数目q,根据充电车可以传输的方向性的夹角构造出不同的虚拟节点,虚拟节点的数目与传输范围内所有的节点数目正相关,且至多有q个虚拟节点;在步骤3中,先构造特殊的静态充电节点集合v={v1,v2,...vm}为充电节点,有着一定可以传输角度和传输范围的充电车在确定的充电节点处根据可传输范围内的无线传感网节点数目q,以范围内每个传感网节点和为充电节点的连线为角平分线可以把一个充电节点分为q个虚拟节点,其位置与充电节点在空间中的位置相同,和范围内可传输到的节点之间的传输效率和权利要求2中的传输效率要求一致,且由一个充电节点拆出的不同虚拟节点之间的传输效率为0,对erd-egy子问题进行充分分析,进一步与静态网络的能量在分配过程相统一;解决erd-egy传输造成的能量损失最小化子问题,利用lp求解器可以最优的解决传输造成的能量损失问题;在步骤4中,经过分析,首先将每个充电节点和根据方向性无线充电车的放电过程转化为无线传感网络的能量在分配过程,充电车的指向性问题转换为仅与可充电范围内的节点的能量传输系数为正,进一步与静态网络的能量在分配过程相统一,且erd-egy问题是能量传输造成的能量损失最小化和充电车移动造成的能量损失最小化两个子问题的统一,解决方向性无线充电车的调度问题,利用成熟的求解算法获得充电车的移动路径、移动能耗和移动时间、然后把步骤4和步骤5结合;在步骤6中,采用逐个比较的方法,按照移动路径所经过的节点数目为循环次数,每次删掉经过的一个充电位置,同时删除该充电位置衍生的所有虚拟节点,计算在每个虚拟节点和无线传感网节点的能量传输满足s5求得的时间长度的情况下,充电结束后的能量总损失若删除充电节点可以使能量损失最小化,则在分析调度序列是不考虑该节点生成的虚拟节点;循环后可以获得各个节点的能量传输最佳时间长度,使得充电过程完成后,能量损失最小,分析和解决erd-time问题,首先给定一个方向性的充电车的移动路径、移动能耗和移动时间,以及给定的n个静态充电节点之间位置u,能量下限el、初始能量eb、能量需求ee、能量传输功率p,然后找到一个最佳调度s,使得调度过程的时间跨度τ最小,最后可以通过选择待发送能量节点间,当前能量最大的节点,并且要求在每一个节点发送能量时,其邻居节点都没有发送能量,循环该过程,直到所有节点完成其最佳时间长度,在步骤7中,erd-time问题的核心是给定已获得的时间长度列表t、充电车移动路径和移动时间,和冲突图g(v,e),目标是找到具有最小时间跨度的能量调度序列,使得总调度的时间跨度最小,然后依次选择待发送能量节点中,当前能量最大的节点,并且利用冲突图g将冲突节点置于能量接收状态,以此产生一个调度集合中元素,若充电车处于移动过程中,确定调度集合中元素发送节点集合的步骤如下:(a1)将u中需要发送能量的节点中当前能量最大的节点加入到发送节点集合;(a2)将(a1) 中新加入的节点的邻居节点加入到邻居节点集合;(a3)重复(a1)(a2) 直到没有待分配的需要发送能量的节点,调度集合中元素的时间长度是以下四个时间的最小值:(c1)节点未调度时间长度变成0的最短时间;(c2) 节点达到其ell的最短时间;(c3)充电车到达下一个充电位置的剩余时间; (c4)充电车在当前位置当前方向剩余充电时间。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1