电动汽车爬坡多电机无位置传感器同步控制方法
1.本发明属于交流电机传动控制技术领域,具体涉及电动汽车爬坡多电机无位置传感器同步控制方法。
背景技术:
2.目前,以电机为牵引动力源的电动汽车得到了广泛关注和大力发展。一方面,电动汽车具有噪音低、振动小及节能环保的优点,既能摆脱对石油的依赖,又可以降低二氧化碳排放,有效缓解能源及环境危机。另一方面,pmsm(表贴式永磁同步电机)具有效率高、功率密度高、结构简单、噪声低和体积小的优点,非常适合作为牵引电机应用于电动汽车中。而现有的电动汽车牵引系统多采用机械位置/速度传感器来获取电机的位置或转速信号。在电动汽车实际运行过程中,电磁环境复杂、振动剧烈,易导致机械式传感器失效而引发牵引系统故障,造成大转矩冲击,严重时损伤轴承、齿轮、电机等关键部件,危害电动汽车的运行安全。
3.pmsm电驱动系统作为传统燃油汽车中发动机和变速箱功能的替代,决定了车辆的起动、爬坡、加速等关键性指标,其工程化和产业化对于电动汽车产业发展影响重大。与普通的工业用电机驱动系统不同,电动汽车对于pmsm电驱动系统性能有更高的要求。
4.目前常见的多电机协同控制结构主要由机械同步结构与电子同步结构两类。电气控制方式可以同时控制多台电机的位置、转速等一系列参数,以此来控制几台电机协同运转,对于多电机协同控制系统,可以由跟踪误差和同步误差直接判断系统性能是否达到要求。当前,常用与电动汽车的多电机协同控制主要有交叉耦合同步控制、相邻交叉耦合控制以及偏差耦合同步控制。交叉耦合只适用于电机数目较少的情况,相邻交叉耦合存在延时情况,偏差耦合受跟随误差影响较大。
5.当电动汽车运行在爬坡工况下时,要求电机要为电动汽车提供足够的驱动力,即当电动汽车在爬坡工况下时,永磁同步轮毂电机要输出足够大的转矩。而这种突变的转矩波动,会导致永磁同步电机无位置传感器控制中转子初始位置估计的偏差从而影响永磁同步电机无位置传感器的控制性能并且引起电机大转矩输出下的启动失败,当单电机的控制精度受损时,多电机协同控制的跟踪误差和同步误差也会增大,影响电动汽车的驱动性能。
技术实现要素:
6.为克服上述技术的不足,本发明的目的是提供电动汽车爬坡多电机无位置传感器同步控制方法,通过基于锁相环的自适应滑模观测器和电流环自抗扰控制器来改善电动汽车爬坡工况下单电机的无位置传感器控制性能,进一步提升转速估计精度、转子位置估计精度并减小转矩波动的影响,通过均值耦合来完成四台电机的协同控制。
7.为实现上述目的,本发明采用的技术方案是:
8.电动汽车爬坡多电机无位置传感器同步控制方法,基于静止坐标系即αβ坐标系估计扩展反电势,构造自适应滑模观测器,采用锁相环pll代替反正切计算进行转子位置跟
踪,根据给定电流和估计电流搭建电流环自抗扰控制器,包括以下步骤:
9.步骤1,设计自适应滑模观测器,获得转子位置估计值,具体做法是:
10.步骤1.1,对于表贴式永磁同步电机,静止坐标系下的电流方程为式(1)所示:
[0011][0012]
式中,r为定子电阻,ls为定子电感,i
α
α轴电流,i
β
为β轴电流,u
α
为α轴电压,u
β
为β轴电压,e
α
为α轴反电势,e
β
为β轴反电势,表示对i
α
求导,表示对i
β
求导,
[0013]
且e
α
和e
β
满足式(2)
[0014][0015]
式中,为定子磁链,ωe为电气角速度,θe为转子位置角;
[0016]
步骤1.2,定义滑模面函数s,为式(3)所示:
[0017][0018]
式(3)中,代表α轴估计电流,为β轴估计电流,为α轴电流误差,为β轴电流误差;
[0019]
步骤1.3,构造自适应滑模观测器,为式(4)所示:
[0020][0021]
式中k为负常数,sign为符号函数,为α轴估计反电势,为β
轴估计反电势,表示对求导,表示对求导;
[0022]
步骤1.4,滑模面设计的核心是确定变量误差,用式(4)减去式(1),可得α轴电流误差和β轴电流误差状态观测方程为式(5)所示:
[0023][0024]
式中,为α轴反电势误差的非奇异终端滑模面,为β轴反电势误差,表示对求导,表示对求导;
[0025]
步骤1.5,当时,系统进入滑模面,则反电动势的自适应律为式(6)所示:
[0026][0027]
步骤1.6,由于反正切计算的鲁棒性较差,采用锁相环pll进行转子位置跟踪,由式(7)可得自适应滑模观测器中锁相环的输入误差δe;
[0028][0029]
通过锁相环pll即可得估计的转子角速度以及转子估计值估计转速np为电机极对数,通过估计转速即可构建转速环;
[0030]
步骤2,基于估计的电流以及电流给定值构建电流环自抗扰控制器,包括跟踪微分器td、扩张状态观测器eso以及非线性状态误差反馈控制律nlsef,具体做法是:
[0031]
步骤2.1,对于表贴式永磁同步电机,常采用的控制方式,构建d轴和q轴自抗扰控制器的td,为式(8)和式(9)所示;
[0032][0033][0034]
式中,是d轴给定电流且是d轴给定电流且是q轴给定电流,r是跟踪速度,fal为非线性函数;z
11d
为d轴跟踪微分器的跟踪信号,是z
11d
的微分,x
1d
是d轴跟踪微分器的状态变量,a
0d
是d轴跟踪微分器的非线性因子,δ
0d
是d轴跟踪微分器的滤波因子;z
11q
为q轴跟踪微分器的跟踪信号,是z
11
的微分,x
1q
是q轴跟踪微分器的状态变量,a
0q
是q轴跟踪微分器的非线性因子,δ
0q
是q轴跟踪微分器的滤波因子;
[0035]
步骤2.2,根据d轴估计电流以及q轴估计电流构建d轴和q轴扩张状态观测器eso,为式(10)和(11)所示;
[0036][0037][0038]
式中,b为扰动补偿增益,z
21d
是对的状态观测值,为z
21d
的微分,z
22d
为d轴扰动估计值,为z
22d
的微分,β
1d
和β
2d
为d轴eso的误差增益,a
1d
和a
2d
是d轴eso的非线性因子,δ
1d
和δ
2d
是d轴eso的滤波因子,τd为d轴eso控制量,x
2d
是d轴eso的状态变量;z
21q
是是对的状态观测值,为z
21q
的微分,z
22q
为q轴扰动估计值,为z
22q
的微分β
1q
和β
2q
为q轴eso的误差增益,a
1q
和a
2q
是q轴eso的非线性因子,δ
1q
和δ
2q
是q轴eso的滤波因子,τq为q轴eso控制量,x
2q
是q轴eso的状态变量;
[0039]
步骤2.3,构建d轴和q轴非线性状态误差反馈控制律nlsef,为式(12)和式(13)所示:
[0040][0041][0042]
式中,xd为d轴nlsef的状态变量,τ
d0
为d轴nlsef的非线性反馈的输出量,ad是d轴nlsef的的非线性因子,δd是d轴nlsef的的滤波因子,β
3d
是d轴nlsef的控制律增益系数;xq为q轴nlsef的状态变量,τ
q0
为q轴nlsef的非线性反馈的输出量,aq是q轴nlsef的的非线性因子,δq是q轴nlsef的的滤波因子,β
3q
是q轴nlsef的控制律增益系数,
[0043]
利用d轴和q轴自抗扰控制器代替传统电流环中的pi控制器,即可构成电流环,通过电流环以及步骤1中得到的转速环即可构成双闭环结构,从而对单永磁同步电机进行控制。
[0044]
多永磁同步电机无传感器协同控制的均值耦合方法,基于给定转速n*以及估计转速设计速度跟随控制器和速度同步控制器,具体包括以下步骤:
[0045]
步骤1,计算每台表贴式永磁同步电机spmsm的跟踪误差,为式(14)所示:
[0046][0047]
式中,e1为第一台spmsm的跟踪误差,e2为第二台spmsm的跟踪误差,e3为第三台spmsm的跟踪误差,e4为第四台spmsm的跟踪误差;n
*
为给定转速,为第一台spmsm的估计转速,为第二台spmsm的估计转速,为第三台spmsm的估计转速,为第四台spmsm的估计转速;
[0048]
步骤2,设计速度跟踪控制器,具体做法为:
[0049]
步骤2.1,设每台spmsm的跟踪误差函数的状态变量,为式(15)所示:
[0050]
[0051]
式中,y
11
是第一台spmsm的状态变量,y
12
是第二台spmsm的状态变量,y
13
是第三台spmsm的状态变量,y
14
是第四台spmsm的状态变量;
[0052]
步骤2.2,定义每台spmsm的速度跟踪控制器的全局终端滑模面为式(16):
[0053][0054]
式中,s1、s2、s3和s4分别为第一台、第二台、第三台和第四台spmsm的全局终端滑模面,是y
11
的微分,是y
12
的微分,是y
13
的微分,是y
14
的微分,a和β0为滑模增益且为正数,p和c为正奇数;
[0055]
步骤2.3,定义每台spmsm的全局终端滑模控制律为式(17)
[0056][0057]
式中,pn为电机极对数,为定子磁链,j为转动惯量,a1和β1为控制律设计参数且大于0,u1、u2、u3和u4分别为第一台、第二台、第三台和第四台spmsm的全局终端滑模控制律;
[0058]
步骤2.4,每台spmsm的跟踪控制电流为式(18)所示:
[0059][0060]
式中,i
g1
、i
g2
、i
g3
和i
g4
分别为第一台、第二台、第三台和第四台spmsm的跟踪控制电流;
[0061]
步骤3,计算每台spmsm的同步误差,为式(19)所示:
[0062][0063]
式中,e
t1
为第一台spmsm的同步误差,e
t2
为第二台spmsm的同步误差,e
t3
为第三台spmsm的同步误差,e
t4
为第四台spmsm的同步误差;
[0064]
步骤4,设计速度同步控制器,具体做法是:
[0065]
步骤4.1,设每台spmsm的同步误差函数的状态变量为式(20)所示:
[0066][0067]
式中,y
t11
是第一台spmsm的同步状态变量,y
t12
是第二台spmsm的两个同步状态变量,y
t13
是第三台spmsm的两个状态变量,y
t14
是第四台spmsm的两个状态变量;
[0068]
步骤4.2,每台spmsm的同步控制电流为式(21)所示:
[0069][0070]
式中,i
t1
、i
t2
、i
t3
和i
t4
分别为第一台、第二台、第三台和第四台spmsm的同步控制电流;是y
t11
的微分,是y
t12
的微分,是y
t13
的微分,是y
t14
的微分;
[0071]
步骤5,计算每台spmsm的q轴给定电流,具体做法为:为式所示:
[0072][0073]
式中,和分别为第一台、第二台、第三台和第四台spmsm的q轴给定电流,得到每台spmsm的q轴给定电流后即可输入每台电流环自抗扰控制器中,完成四台电机的同步协调控制。
[0074]
本发明的有益效果是:
[0075]
1)实现了用于电动汽车爬坡的永磁同步电机无位置传感器控制;
[0076]
2)通过自抗扰控制,减小了在电动汽车爬坡工况下转矩突增对转速的影响;
[0077]
3)改善了无位置传感器的控制性能,提高了位置估计精度。
[0078]
4)提高了电动汽车爬坡时无位置传感器的多电机协同控制精度。
[0079]
在单永磁同步电机无位置传感器控制中使用自适应滑模观测器以及电流环自抗扰控制器对转矩波动进行误差补偿,提高控制精度,采用均值耦合对四台电机进行协同控制。
附图说明
[0080]
图1是本发明一种spmsm无位置传感器控制原理框图。
[0081]
图2是本发明一种基于锁相环的自适应滑模观测器原理框图。
[0082]
图3是本发明电流环自抗扰控制器的原理框图。
[0083]
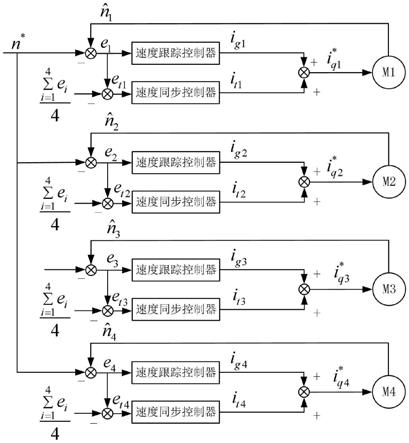
图4是本发明一种均值耦合控制的原理框图。
具体实施方式
[0084]
下面结合附图和具体实施方式对本发明进行详细说明。
[0085]
本发明是一种用于电动汽车爬坡的多永磁同步电机无位置传感器协同控制策略,具体按照以下步骤实施:
[0086]
对于表贴式永磁同步电机(spmsm)无位置传感器控制,采用自适应滑模观测器,并采用电流环自抗扰控制器减小电动汽车爬坡时转矩波动的影响,spmsm无位置传感器控制原理框图如图1所示;
[0087]
电动汽车爬坡多电机无位置传感器同步控制方法,其特征在于,基于静止坐标系即αβ坐标系估计扩展反电势,构造自适应滑模观测器,采用锁相环pll代替反正切计算进行转子位置跟踪,根据给定电流和估计电流搭建电流环自抗扰控制器,包括以下步骤:
[0088]
步骤1,设计基于锁相环的自适应滑模观测器,获得转子位置估计值,其原理图如图2所示;
[0089]
步骤1.1,对于spmsm,静止坐标系下的电流方程如式(1)所示:
[0090][0091]
式中,r为定子电阻,ls为定子电感,i
α
为α轴电流,i
β
为β轴电流,u
α
为α轴电压,u
β
为β轴电压,e
α
为α轴反电势,e
β
为β轴反电势,表示对i
α
求导,表示对i
β
求导,
[0092]
且e
α
和e
β
满足式(2)
[0093][0094]
式中,为定子磁链,ωe为电气角速度,θe为转子位置角;
[0095]
步骤1.2,定义滑模面函数s,为式3所示:
[0096][0097]
式(3)中,代表α轴估计电流,为β轴估计电流,为α轴电流误差,为β轴电流误差。
[0098]
步骤1.3,构造自适应滑模观测器为式(4)所示:
[0099][0100]
式中k为负常数,sign为符号函数,为α轴估计反电势,为β轴估计反电势,表示对求导,表示对求导;
[0101]
步骤1.4,滑模面设计的核心是确定变量误差,用式(4)减去式(1),可得α轴电流误差和β轴电流误差状态观测方程由式(5)所示;
[0102][0103]
式中,为α轴反电势误差的非奇异终端滑模面,为β轴反电势误差,表示对求导,表示对求导;
[0104]
步骤1.5,当时,系统进入滑模面,则反电动势的自适应律为(6)
[0105][0106]
步骤1.6,由于反正切计算的鲁棒性较差,采用锁相环pll进行转子位置跟踪,由式(7)可得自适应滑模观测器中锁相环的输入误差δe;
[0107][0108]
通过锁相环pll即可得估计的转子角速度以及转子估计值估计转速np为电机极对数,通过估计转速即可构建转速环;
[0109]
步骤2,基于估计的电流以及电流给定值构建电流环自抗扰控制器,包括跟踪微分器td、扩张状态观测器eso以及非线性状态误差反馈控制律nlsef。其原理框图如图3所示;具体步骤为:
[0110]
步骤2.1,对于表贴式永磁同步电机,常采用的控制方式,构建d轴和q轴自抗扰控制器的td为式(8)和式(9)所示;
[0111][0112][0113]
式中,是d轴给定电流且是d轴给定电流且是q轴给定电流,r是跟踪速度,fal为非线性函数;z
11d
为d轴跟踪微分器的跟踪信号,是z
11d
的微分,x
1d
是d轴跟踪微分器的状态变量,a
0d
是d轴跟踪微分器的非线性因子,δ
0d
是d轴跟踪微分器的滤波因子;z
11q
为q轴跟踪微分器的跟踪信号,是z
11
的微分,x
1q
是q轴跟踪微分器的状态变量,a
0q
是q轴跟踪微分器的非线性因子,δ
0q
是q轴跟踪微分器的滤波因子;
[0114]
步骤2.2,根据d轴估计电流以及q轴估计电流构建d轴和q轴扩张状态观测器eso,为式(10)和(11)所示;
[0115][0116][0117]
式中,b为扰动补偿增益,z
21d
是对的状态观测值,为z
21d
的微分,z
22d
为d轴扰动估计值,为z
22d
的微分,β
1d
和β
2d
为d轴eso的误差增益,a
1d
和a
2d
是d轴eso的非线性因子,δ
1d
和δ
2d
是d轴eso的滤波因子,τd为d轴eso控制量,x
2d
是d轴eso的状态变量;z
21q
是是对的状态观测值,为z
21q
的微分,z
22q
为q轴扰动估计值,为z
22q
的微分β
1q
和β
2q
为q轴eso的误差增益,a
1q
和a
2q
是q轴eso的非线性因子,δ
1q
和δ
2q
是q轴eso的滤波因子,τq为q轴eso控制量,x
2q
是q轴eso的状态变量;
[0118]
步骤2.3,构建d轴和q轴非线性状态误差反馈控制律nlsef为式(12)和式(13)所示:
[0119][0120][0121]
式中,xd为d轴nlsef的状态变量,τ
d0
为d轴nlsef的非线性反馈的输出量,ad是d轴nlsef的的非线性因子,δd是d轴nlsef的的滤波因子,β
3d
是d轴nlsef的控制律增益系数;xq为q轴nlsef的状态变量,τ
q0
为q轴nlsef的非线性反馈的输出量,aq是q轴nlsef的的非线性因子,δq是q轴nlsef的的滤波因子,β
3q
是q轴nlsef的控制律增益系数,
[0122]
利用d轴和q轴自抗扰控制器代替传统电流环中的pi控制器,即可构成电流环,通过电流环以及步骤1中得到的转速环即可构成双闭环结构,从而对单永磁同步电机进行控制,构成控制器。
[0123]
利用d轴和q轴自抗扰控制器代替传统电流环中的pi控制器,即可构成电流环。
[0124]
采用均值耦合法对四台采用单电机无传感器控制方法的spmsm进行多电机协同控
制,均值耦合的控制原理框图如图4所示;具体步骤为:
[0125]
步骤1,计算每台spmsm的跟踪误差为式(14)所示
[0126][0127]
式中,e1为第一台spmsm的跟踪误差,e2为第二台spmsm的跟踪误差,e3为第三台spmsm的跟踪误差,e4为第四台spmsm的跟踪误差;n
*
为给定转速,为第一台spmsm的估计转速,为第二台spmsm的估计转速,为第三台spmsm的估计转速,为第四台spmsm的估计转速;
[0128]
步骤2,设计速度跟踪控制器,为下式所示:
[0129]
步骤2.1,设每台spmsm的跟踪误差函数的状态变量,为式(15)所示:
[0130][0131]
式中,y
11
是第一台spmsm的状态变量,y
12
是第二台spmsm的状态变量,y
13
是第三台spmsm的状态变量,y
14
是第四台spmsm的状态变量;
[0132]
步骤2.2,定义每台spmsm的速度跟踪控制器的全局终端滑模面为式(16):
[0133][0134]
式中,s1、s2、s3和s4分别为第一台、第二台、第三台和第四台spmsm的全局终端滑模面,是y
11
的微分,是y
12
的微分,是y
13
的微分,是y
14
的微分,a和β0为滑模增益且为正数,p和c为正奇数;
[0135]
步骤2.3,定义每台spmsm的全局终端滑模控制律为式(17)
[0136][0137]
式中,pn为电机极对数,为定子磁链,j为转动惯量,a1和β1为控制律设计参数且大于0,u1、u2、u3和u4分别为第一台、第二台、第三台和第四台spmsm的全局终端滑模控制律;
[0138]
步骤2.4,每台spmsm的跟踪控制电流为式(18)所示:
[0139][0140]
式中,i
g1
、i
g2
、i
g3
和i
g4
分别为第一台、第二台、第三台和第四台spmsm的跟踪控制电流;
[0141]
步骤3,计算每台spmsm的同步误差,为式(19)所示:
[0142][0143]
式中,e
t1
为第一台spmsm的同步误差,e
t2
为第二台spmsm的同步误差,e
t3
为第三台spmsm的同步误差,e
t4
为第四台spmsm的同步误差;
[0144]
步骤4,设计速度同步控制器,具体做法是:
[0145]
步骤4.1,设每台spmsm的同步误差函数的状态变量为式(20)所示:
[0146][0147]
式中,y
t11
是第一台spmsm的同步状态变量,y
t12
是第二台spmsm的两个同步状态变量,y
t13
是第三台spmsm的两个状态变量,y
t14
是第四台spmsm的两个状态变量;
[0148]
步骤4.2,每台spmsm的同步控制电流为式(21)所示:
[0149]
[0150]
式中,i
t1
、i
t2
、i
t3
和i
t4
分别为第一台、第二台、第三台和第四台spmsm的同步控制电流;是y
t11
的微分,是y
t12
的微分,是y
t13
的微分,是y
t14
的微分;
[0151]
步骤5,计算每台spmsm的q轴给定电流,具体做法为:为式所示:
[0152][0153]
式中,和分别为第一台、第二台、第三台和第四台spmsm的q轴给定电流,得到每台spmsm的q轴给定电流后即可输入每台电流环自抗扰控制器中,完成四台电机的同步协调控制。
[0154]
当用于电动汽车的标贴式永磁同步电机工作在爬坡工况下时,由于转矩波动以及对大转矩的需求,会出现以下问题:会导致永磁同步电机无位置传感器控制中转子初始位置估计的偏差,影响永磁同步电机无位置传感器的控制性能;由于单电机的控制精度受损,多电机协同控制的跟踪误差和同步误差也会增大,影响电动汽车的驱动性能。为了提高电动汽车用永磁同步电机在爬坡工况下的无位置传感器控制的控制性能以及多电机控制的精度,本发明提出了一种基于电流环自抗扰控制器的均值耦合控制策略,以改善电动汽车爬坡用永磁同步电机的无位置传感器控制性能以及多电机控制精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1