用于电动牙刷中往复摆动式电机的闭环控制系统的制作方法
1.本发明涉及电动牙刷技术领域,尤其是一种用于电动牙刷中往复摆动式电机的闭环控制系统。
背景技术:
2.电动牙刷是近几年开始流行的新产品,并在国外已掀起了口腔保健领域的一场革命。随着电动牙刷在我国的大范围普及,并且随着人们对其认知的提高,电动牙刷也会成为了大众保健品中重要的一员。调查显示,电动牙刷与普通牙刷相比,更为科学有效,可以更彻底清除牙菌斑、减少牙龈炎和牙龈出血,电动牙刷是通过马达输出轴的快速往复旋转,使刷头产生高频振动,从而瞬间将牙膏分解成细微泡沫,深入清洁牙缝;目前在电动牙刷中驱动马达通常采用往复摆动式电机,利用高频率的交流信号驱动马达作旋转摆动,由于每个马达的内部磁路、线圈的阻抗存在一定的差异,导致马达工作时的摆动角度和驱动力有一定的离散性,并且在牙刷工作时,不同的人会使用不同的压力,导致马达在各种负载下呈现不同的摆幅。由于现有的马达缺乏输出反馈机制,不能很好的确定电机输出轴转动角度,使得目前的电动牙刷不能根据需要来调整摆动角度的大小,从而使摆幅恒定或按需调整,大大降低了牙刷的使用效果,同时由于反馈机制的缺乏,影响后续牙刷的开发使用,降低用户的使用体验。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种用于电动牙刷中往复摆动式电机的闭环控制系统,其结构构成简单,具有良好的控制反馈效果,有效保持电机的输出摆幅,保证用户使用体验。
4.为实现上述目的,本发明提供了一种用于电动牙刷中往复摆动式电机的闭环控制系统,包括控制模块、检测模块、运算模块和驱动模块,所述控制模块、检测模块、运算模块和驱动模块之间分别通讯连接;
5.所述控制模块用于输入摆幅调整指令和逻辑信息,根据摆幅调整指令和逻辑信息生成电压波形信息,所述电压波形信息包括幅值、频率和占空比信息,并将电压波形信息发送给驱动模块;
6.所述检测模块用于获取电机输出轴产生的物理量信息,所述物理量信息包括发现绕组产生的电压或电流、电容传感器产生的电容、霍尔传感器产生的电压,并将物理量发送给运算模块;
7.所述运算模块用于接收物理量信息,并根据物理量信息计算出电机实时摆幅数值,并输出电机实时摆幅数值;
8.所述驱动模块用于接收电压波形信息,并根据电压波形信息调整电机的输出功率。
9.这样设置的有益效果是:这样设置,在电机工作时,通过检测模块获取电机的工作
信息,同时也计算获取电机摆动的摆幅信息,在接收到新的摆幅调整指令后,控制模块会根据目标摆幅,以及预先输入的逻辑信息,获得控制用电压波形信息,并通过电压波形信息控制电机的输出功率,因电机的输出功率与电机的输出轴的摆幅成正比关系,电机输出功率的改变导致电机的摆幅随之改变,从而改变输出摆幅,从而达到目标摆幅数值,这样设置,整体模块简单合理,控制便捷,具有良好的控制效果,并且控制效率高,满足对电动牙刷摆幅以及频率的控制,具有良好的实用效果,满足用户使用需求。
10.作为本发明的进一步设置,所述检测模块还用于检测获得电机的实时输出摆幅,并将实时输出摆幅发送给运算模块;所述运算模块还用于接收实时输出摆幅,并在驱动模块调整电机输出功率后,将所述输出摆幅与摆幅调整指令要求的目标摆动幅度进行比对,当摆动幅度无法达到目标摆幅时继续生成调整指令,并将调整指令发送给驱动模块,直至输出摆幅符合目标摆幅;所述驱动模块还用于接收调整指令,并控制电机改变输出功率数值。
11.这样设置的有益效果是:这样设置,可以及时发现未达标的情况,及时反馈,同时可以通过调整指令,对输出功率数值进行调整,从而满足控制指令的需求,这样设置简单,具有良好的使用效果,控制也更为稳定。
12.作为本发明的进一步设置,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括磁性件、发电绕组和数值检测器,所述发电绕组与数值检测器相连接,所述数值检测器固定设置在电机机壳上并与运算模块电连接,所述磁性件与发电绕组其中一项与电机输出轴固定,另一项与电机机壳保持相对固定设置。
13.这样设置的有益效果是:这样设置,通过设置发电绕组和磁性件,同时发电绕组与磁性件相对运动设置,这里的运动指的是,两者其中一项运动,另一结构保持固定,可以将发电绕组设置在输出轴上,将磁铁设置在壳体上,在输出轴转动时,其上的发电绕组随之转动,同时靠近设置有磁铁,磁铁产生磁力线,同时绕组与运算模块连接,形成一个导通的回路,随着发电绕组随着输出轴的运动,从而切割磁力线,从而产生感应电流或电压,即磁生电的原理,同样的也可以将发电绕组设置在壳体轴上,将磁铁设置在输出轴上,并且在该电机结构中,输出轴的转动幅度越大,导出线切割磁力线产生的感应电流或电压就越大,并且两者关系呈线性变化,便于数据的转换,从而有效获取输出轴的摆动幅度,数据更为准确,便于运算模块分析计算,提高系统的使用效果。
14.作为本发明的进一步设置,所述检测模块包括摆幅检测单元,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括电容传感器的动极片和静极片的组合以及数值检测器,所述数值检测器与运算模块电连接,所述检测单元的静极片与电机机壳保持相对固定设置,所述动极片与输出轴固定并随输出轴动态运行。
15.这样设置的有益效果是:这样设置,动极片和静极片分别是电容的两个极片,通过两个接线端子与运算模块的电路相连。当输出轴旋转时,输出轴带动动极片往复转动,电容的极片间的面积不断变化,电容也随之变化,通过外部运算模块的电路计算出电容的大小,同时由于输出轴的转动幅度越大,电容的重合面积越大,检测到的电容就越大,且两者关系呈线性变化,从而通过检测电容的大小来反馈输出轴的旋转角度的大小。这种结构简单,检测效果好,同时结构稳定,可以有效反馈输出轴的转动幅度,有效提高整体结构的使用效果。
16.作为本发明的进一步设置,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括霍尔传感器、磁铁和数值检测器,所述数值检测器与运算模块电连接,所述霍尔传感器和磁铁其中一项与电机输出轴固定并随输出轴动态运行,另一项与电机机壳保持相对固定设置。
17.这样设置的有益效果是:这样设置,通过设置霍尔传感器和磁铁组合,同时霍尔传感器与磁铁相对运动设置,这里的运动指的是,两者其中一项运动,另一结构保持固定,可以将霍尔传感器设置在输出轴上,将磁铁设置在壳体上,在输出轴转动时,其上的霍尔传感器随之转动,同时靠近设置有磁铁,磁铁产生磁场,同时霍尔传感器与运算模块连接,形成一个导通的回路,随着霍尔传感器随着输出轴的运动,其感应到磁场变化,在霍尔传感器中感应出响应的霍尔电压,即霍尔效应,同样的也可以将霍尔传感器设置在壳体轴上,将磁铁设置在输出轴上,并且在该电机结构中,输出轴的转动幅度越大,在霍尔传感器中感应到的电压就越大,并且两者关系呈线性变化,便于数据的转换,从而有效获取输出轴的摆动幅度,数据更为准确,便于运算模块分析计算,提高系统的使用效果。
18.作为本发明的进一步设置,所述数值检测器将检测到电压或电流、霍尔电压、电容值等物理量信息发给检测模块。
19.这样设置的有益效果是:这样设置,使得数值反馈更为准确,便于读取,方便后续运算模块的数据分析,提高系统的使用效果。
附图说明
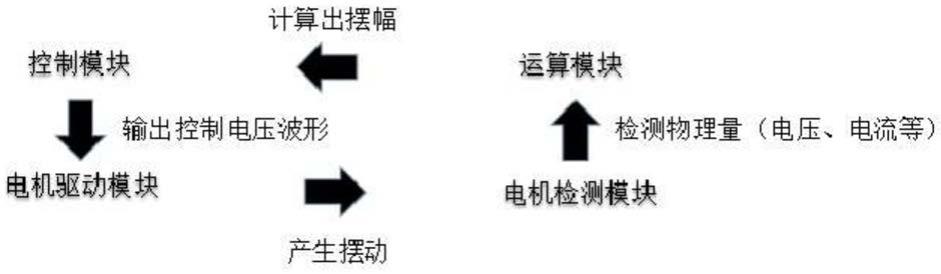
20.图1为本发明实施例的闭环控制原理图;
21.图2为本发明第一种实施例的接线示意图;
22.图3为本发明第二种实施例的接线示意图;
23.图4为本发明第三种实施例的接线示意图。
具体实施方式
24.本发明用于电动牙刷中往复摆动式电机的闭环控制系统的第一种实施例如图1至图2所示:包括控制模块、检测模块、运算模块和驱动模块,所述控制模块、检测模块、运算模块和驱动模块之间分别通讯连接;
25.所述控制模块用于输入摆幅调整指令和逻辑信息,根据摆幅调整指令和逻辑信息生成电压波形信息,所述电压波形信息包括幅值、频率和占空比信息,并将电压波形信息发送给驱动模块;
26.所述检测模块用于获取电机输出轴产生的物理量信息,所述物理量信息包括发现绕组产生的电压或电流、电容传感器产生的电容、霍尔传感器产生的电压,并将物理量发送给运算模块;
27.所述运算模块用于接收物理量信息,并根据物理量信息计算出电机实时摆幅数值,并输出电机实时摆幅数值;
28.所述驱动模块用于接收电压波形信息,并根据电压波形信息调整电机的输出功率。这样设置的有益效果是:这样设置,在电机工作时,通过检测模块获取电机的工作信息,同时也计算获取电机摆动的摆幅信息,在接收到新的摆幅调整指令后,控制模块会根据目
标摆幅,以及预先输入的逻辑信息,获得控制用电压波形信息,并通过电压波形信息控制电机的输出功率,因电机的输出功率与电机的输出轴的摆幅成正比关系,电机输出功率的改变导致电机的摆幅随之改变,从而改变输出摆幅,从而达到目标摆幅数值,这样设置,整体模块简单合理,控制便捷,具有良好的控制效果,并且控制效率高,满足对电动牙刷摆幅以及频率的控制,具有良好的实用效果,满足用户使用需求。
29.作为本实施方式的进一步设置,所述检测模块还用于检测获得电机的实时输出摆幅,并将实时输出摆幅发送给运算模块;所述运算模块还用于接收实时输出摆幅,并在驱动模块调整电机输出功率后,将所述输出摆幅与摆幅调整指令要求的目标摆动幅度进行比对,当摆动幅度无法达到目标摆幅时继续生成调整指令,并将调整指令发送给驱动模块,直至输出摆幅符合目标摆幅;所述驱动模块还用于接收调整指令,并控制电机改变输出功率数值。这样设置的有益效果是:这样设置,可以及时发现未达标的情况,及时反馈,同时可以通过调整指令,对输出功率数值进行调整,从而满足控制指令的需求,这样设置简单,具有良好的使用效果,控制也更为稳定。
30.作为本实施方式的进一步设置,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括磁性件、发电绕组和数值检测器,所述发电绕组与数值检测器相连接,所述数值检测器固定设置在电机机壳上并与运算模块电连接,所述磁性件与发电绕组其中一项与电机输出轴固定,另一项与电机机壳保持相对固定设置。这样设置的有益效果是:这样设置,通过设置发电绕组和磁性件,同时发电绕组与磁性件相对运动设置,这里的运动指的是,两者其中一项运动,另一结构保持固定,可以将发电绕组设置在输出轴上,将磁铁设置在壳体上,在输出轴转动时,其上的发电绕组随之转动,同时靠近设置有磁铁,磁铁产生磁力线,同时绕组与运算模块连接,形成一个导通的回路,随着发电绕组随着输出轴的运动,从而切割磁力线,从而产生感应电流或电压,即磁生电的原理,同样的也可以将发电绕组设置在壳体轴上,将磁铁设置在输出轴上,并且在该电机结构中,输出轴的转动幅度越大,导出线切割磁力线产生的感应电流或电压就越大,并且两者关系呈线性变化,便于数据的转换,从而有效获取输出轴的摆动幅度,数据更为准确,便于运算模块分析计算,提高系统的使用效果。
31.作为本实施方式的进一步设置,所述数值检测器将检测到电压或电流、霍尔电压、电容值等物理量信息发给检测模块。这样设置的有益效果是:这样设置,使得数值反馈更为准确,便于读取,方便后续运算模块的数据分析,提高系统的使用效果。
32.本发明用于电动牙刷中往复摆动式电机的闭环控制系统的第二种实施例如图1、图3所示:包括控制模块、检测模块、运算模块和驱动模块,所述控制模块、检测模块、运算模块和驱动模块之间分别通讯连接;
33.所述控制模块用于输入摆幅调整指令和逻辑信息,根据摆幅调整指令和逻辑信息生成电压波形信息,所述电压波形信息包括幅值、频率和占空比信息,并将电压波形信息发送给驱动模块;
34.所述检测模块用于获取电机输出轴产生的物理量信息,所述物理量信息包括发现绕组产生的电压或电流、电容传感器产生的电容、霍尔传感器产生的电压,并将物理量发送给运算模块;
35.所述运算模块用于接收物理量信息,并根据物理量信息计算出电机实时摆幅数值,并输出电机实时摆幅数值;
36.所述驱动模块用于接收电压波形信息,并根据电压波形信息调整电机的输出功率。这样设置的有益效果是:这样设置,在电机工作时,通过检测模块获取电机的工作信息,同时也计算获取电机摆动的摆幅信息,在接收到新的摆幅调整指令后,控制模块会根据目标摆幅,以及预先输入的逻辑信息,获得控制用电压波形信息,并通过电压波形信息控制电机的输出功率,因电机的输出功率与电机的输出轴的摆幅成正比关系,电机输出功率的改变导致电机的摆幅随之改变,从而改变输出摆幅,从而达到目标摆幅数值,这样设置,整体模块简单合理,控制便捷,具有良好的控制效果,并且控制效率高,满足对电动牙刷摆幅以及频率的控制,具有良好的实用效果,满足用户使用需求。
37.作为本实施方式的进一步设置,所述检测模块还用于检测获得电机的实时输出摆幅,并将实时输出摆幅发送给运算模块;所述运算模块还用于接收实时输出摆幅,并在驱动模块调整电机输出功率后,将所述输出摆幅与摆幅调整指令要求的目标摆动幅度进行比对,当摆动幅度无法达到目标摆幅时继续生成调整指令,并将调整指令发送给驱动模块,直至输出摆幅符合目标摆幅;所述驱动模块还用于接收调整指令,并控制电机改变输出功率数值。这样设置的有益效果是:这样设置,可以及时发现未达标的情况,及时反馈,同时可以通过调整指令,对输出功率数值进行调整,从而满足控制指令的需求,这样设置简单,具有良好的使用效果,控制也更为稳定。
38.作为本实施方式的进一步设置,所述检测模块包括摆幅检测单元,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括电容传感器的动极片和静极片的组合以及数值检测器,所述数值检测器与运算模块电连接,所述检测单元的静极片与电机机壳保持相对固定设置,所述动极片与输出轴固定并随输出轴动态运行。这样设置的有益效果是:这样设置,动极片和静极片分别是电容的两个极片,通过两个接线端子与运算模块的电路相连。当输出轴旋转时,输出轴带动动极片往复转动,电容的极片间的面积不断变化,电容也随之变化,通过外部运算模块的电路计算出电容的大小,同时由于输出轴的转动幅度越大,电容的重合面积越大,检测到的电容就越大,且两者关系呈线性变化,从而通过检测电容的大小来反馈输出轴的旋转角度的大小。这种结构简单,检测效果好,同时结构稳定,可以有效反馈输出轴的转动幅度,有效提高整体结构的使用效果。
39.作为本实施方式的进一步设置,所述数值检测器将检测到电压或电流、霍尔电压、电容值等物理量信息发给检测模块。这样设置的有益效果是:这样设置,使得数值反馈更为准确,便于读取,方便后续运算模块的数据分析,提高系统的使用效果。
40.本发明用于电动牙刷中往复摆动式电机的闭环控制系统的第三种实施例如图1、图4所示:包括控制模块、检测模块、运算模块和驱动模块,所述控制模块、检测模块、运算模块和驱动模块之间分别通讯连接;
41.所述控制模块用于输入摆幅调整指令和逻辑信息,根据摆幅调整指令和逻辑信息生成电压波形信息,所述电压波形信息包括幅值、频率和占空比信息,并将电压波形信息发送给驱动模块;
42.所述检测模块用于获取电机输出轴产生的物理量信息,所述物理量信息包括发现绕组产生的电压或电流、电容传感器产生的电容、霍尔传感器产生的电压,并将物理量发送给运算模块;
43.所述运算模块用于接收物理量信息,并根据物理量信息计算出电机实时摆幅数
值,并输出电机实时摆幅数值;
44.所述驱动模块用于接收电压波形信息,并根据电压波形信息调整电机的输出功率。这样设置的有益效果是:这样设置,在电机工作时,通过检测模块获取电机的工作信息,同时也计算获取电机摆动的摆幅信息,在接收到新的摆幅调整指令后,控制模块会根据目标摆幅,以及预先输入的逻辑信息,获得控制用电压波形信息,并通过电压波形信息控制电机的输出功率,因电机的输出功率与电机的输出轴的摆幅成正比关系,电机输出功率的改变导致电机的摆幅随之改变,从而改变输出摆幅,从而达到目标摆幅数值,这样设置,整体模块简单合理,控制便捷,具有良好的控制效果,并且控制效率高,满足对电动牙刷摆幅以及频率的控制,具有良好的实用效果,满足用户使用需求。
45.作为本实施方式的进一步设置,所述检测模块还用于检测获得电机的实时输出摆幅,并将实时输出摆幅发送给运算模块;所述运算模块还用于接收实时输出摆幅,并在驱动模块调整电机输出功率后,将所述输出摆幅与摆幅调整指令要求的目标摆动幅度进行比对,当摆动幅度无法达到目标摆幅时继续生成调整指令,并将调整指令发送给驱动模块,直至输出摆幅符合目标摆幅;所述驱动模块还用于接收调整指令,并控制电机改变输出功率数值。这样设置的有益效果是:这样设置,可以及时发现未达标的情况,及时反馈,同时可以通过调整指令,对输出功率数值进行调整,从而满足控制指令的需求,这样设置简单,具有良好的使用效果,控制也更为稳定。
46.作为本实施方式的进一步设置,所述检测模块包括摆幅检测单元,所述摆幅检测单元包括霍尔传感器、磁铁和数值检测器,所述数值检测器与运算模块电连接,所述霍尔传感器和磁铁其中一项与电机输出轴固定并随输出轴动态运行,另一项与电机机壳保持相对固定设置。这样设置的有益效果是:这样设置,通过设置霍尔传感器和磁铁组合,同时霍尔传感器与磁铁相对运动设置,这里的运动指的是,两者其中一项运动,另一结构保持固定,可以将霍尔传感器设置在输出轴上,将磁铁设置在壳体上,在输出轴转动时,其上的霍尔传感器随之转动,同时靠近设置有磁铁,磁铁产生磁场,同时霍尔传感器与运算模块连接,形成一个导通的回路,随着霍尔传感器随着输出轴的运动,其感应到磁场变化,在霍尔传感器中感应出响应的霍尔电压,即霍尔效应,同样的也可以将霍尔传感器设置在壳体轴上,将磁铁设置在输出轴上,并且在该电机结构中,输出轴的转动幅度越大,在霍尔传感器中感应到的电压就越大,并且两者关系呈线性变化,便于数据的转换,从而有效获取输出轴的摆动幅度,数据更为准确,便于运算模块分析计算,提高系统的使用效果。
47.作为本实施方式的进一步设置,所述数值检测器将检测到电压或电流、霍尔电压、电容值等物理量信息发给检测模块。这样设置的有益效果是:这样设置,使得数值反馈更为准确,便于读取,方便后续运算模块的数据分析,提高系统的使用效果。
48.以上实例,只是本发明优选地具体实例的一种,本领域技术人员在本发明技术方案范围内进行的通常变化和替换都包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1