应用于高压开关柜的开关小车及其控制方法与流程
1.本发明实施例涉及管理控制技术领域,尤其涉及一种应用于高压开关柜的开关小车及其控制方法。
背景技术:
2.随着电力生产的智能化发展,实现设备的调控一体化具有非常重要的意义。
3.目前,变电站内的高压开关柜是通过人力或者机械式的电动开关小车将开关小车摇进摇出的,其中,人力是指变电设备状态转换操作是由变电站值班员就地操作的,机械式电动开关小车是通过改造小车的常规底盘,将电能转化为机械能使小车摇进摇出,前者自动化程度非常低,后者控制精密不够,可靠性低,且智能化程度不高。
技术实现要素:
4.本发明提供一种应用于高压开关柜的开关小车及其控制方法,以精准、可靠、智能化的控制开关小车更改高压开关柜的状态。
5.第一方面,本发明实施例提供了一种应用于高压开关柜的开关小车,包括:主控装置、磁悬浮装置、动力装置和开关小车车体;
6.其中,主控装置用于接收服务器发送的设备控制指令,根据设备控制指令生成电磁方向指令,并发送至动力装置,控制动力装置提供动力,推动磁悬浮装置运动;开关小车车体置于磁悬浮装置上,磁悬浮装置用于带动开关小车车体运动至目标位置;开关小车车体用于改变高压开关柜的状态。
7.可选的,开关小车车体包括小车触头,开关小车车体运动至目标位置时,小车触头与高压开关柜接触,改变高压开关柜的状态。
8.可选的,动力装置包括导轨磁铁;导轨磁铁用于接收主控装置发送的电磁方向指令,并根据电磁方向指令控制导轨磁铁的极性,导轨磁铁提供的磁力与磁悬浮装置提供的磁力相互作用产生动力,推动磁悬浮装置运动。
9.可选的,开关小车还包括距离检测装置;距离检测装置与开关小车车体电连接,用于检测开关小车车体与高压开关柜的距离,并将距离检测结果反馈至主控装置;主控装置还用于根据距离检测结果确定开关小车是否运动至目标位置。
10.可选的,开关小车还包括环境检测装置;环境检测装置与开关小车车体电连接,用于检测高压开关柜的内部环境;其中,环境检测装置包括温度检测仪、湿度检测仪、声纹检测仪、烟雾检测仪;温度检测仪用于检测高压开关柜内部的温度;湿度检测仪用于检测高压开关柜内部的湿度;声纹检测仪用于检测高压开关柜内部的声波;烟雾检测仪用于检测高压开关柜内部的烟雾。
11.可选的,开关小车还包括报警装置;主控装置还包括报警信息采集模块;主控装置用于若距离检测装置检测到开关小车未运动至目标位置,将报警信息通过报警信息采集模块发送至报警装置,以控制报警装置按照预设报警方式进行报警。
12.第二方面,本发明实施例还提供了一种应用于高压开关柜的开关小车的控制方法,该方法包括:
13.接收服务器发送的设备控制指令,设备控制指令包括开关小车的标识信息和控制数据;
14.根据标识信息确定目标开关小车;
15.确定目标开关小车是否满足启动条件,若满足,则根据控制数据控制目标开关小车运动。
16.可选的,根据标识信息确定目标开关小车,包括:获取候选开关小车的标识码,标识码与候选开关小车一一对应;确定标识码与标识信息是否匹配;若标识码与标识信息匹配,则确定标识码对应的候选开关小车为目标开关小车。
17.可选的,根据控制数据控制目标开关小车运动,包括:根据控制数据确定目标开关小车的运行数据;其中,运行数据包括目标开关小车的运动方向、运动距离及目标位置;根据目标开关小车的运动方向和运动距离,控制目标开关小车运动。
18.可选的,控制目标开关小车运动之后,还包括:确定目标开关小车的最新位置与目标位置之间的距离长度;若距离长度大于预设阈值,则根据预设报警方式进行报警;接受服务器发送的报警处理信息和处理结果,并将目标开关小车的运行数据、报警信息、报警处理信息和处理结果进行存储。
19.本发明提供的应用于高压开关柜的开关小车包括:主控装置、磁悬浮装置、动力装置和开关小车车体;其中,主控装置用于接收服务器发送的设备控制指令,根据设备控制指令生成电磁方向指令,并发送至动力装置,控制动力装置提供动力,推动磁悬浮装置运动;开关小车车体置于磁悬浮装置上,磁悬浮装置用于带动开关小车车体运动至目标位置;开关小车车体用于改变高压开关柜的状态。解决了现有高压开关柜的控制方法的自动化程度低、控制精密不够,可靠性低,智能化程度不高的问题,能够精准、可靠、智能化的控制开关小车更改高压开关柜的状态。
附图说明
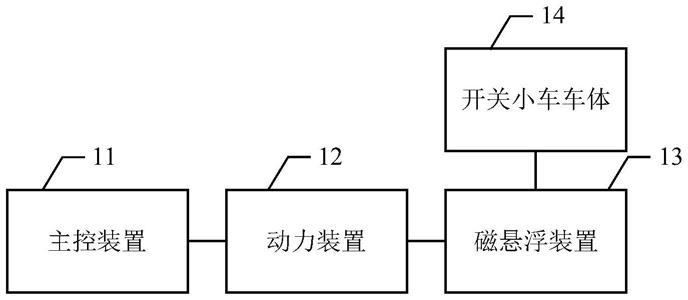
20.图1是本发明实施例提供的一种应用于高压开关柜的开关小车的结构示意图;
21.图2是本发明实施例提供的一种相互作用的磁力的结构示意图;
22.图3是本发明实施例提供的另一种应用于高压开关柜的开关小车的结构示意图;
23.图4是本发明实施例提供的又一种应用于高压开关柜的开关小车的结构示意图;
24.图5是本发明实施例提供的一种应用于高压开关柜的开关小车的控制方法的流程示意图。
具体实施方式
25.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
26.图1是本发明实施例提供的一种应用于高压开关柜的开关小车的结构示意图,如图1所示,应用于高压开关柜的开关小车包括:主控装置11、磁悬浮装置13、动力装置12和开
关小车车体14;其中,主控装置11用于接收服务器发送的设备控制指令,根据设备控制指令生成电磁方向指令,并发送至动力装置12,控制动力装置12提供动力,推动磁悬浮装置13运动;开关小车车体14置于磁悬浮装置13上,磁悬浮装置13用于带动开关小车车体14运动至目标位置;开关小车车体14用于改变高压开关柜的状态。
27.其中,设备控制指令为控制开关小车运动的指令,包括开关小车的运动距离、方向、速度、时间等信息;磁悬浮装置13为两组励磁线圈,具体的,一组励磁线圈与开关小车车体14电连接,另一组励磁线圈与动力装置12电连接,通过为两组励磁线圈导通反向的电流,可以使两组励磁线圈呈现相反的极性,从而产生排斥力,实现开关小车车体14的悬浮。
28.具体的,主控装置11在接收到服务器发送的设备控制指令后,会根据设备控制指令中携带的开关小车的运动方向等信息生成电磁方向控制指令,用以控制动力装置12提供动力,推动磁悬浮装置13运动带动开关小车车体14运动至目标位置。
29.其中,设备控制指令的下发可以是用户近距离完成的,也可以是远程控制的;目标位置为衡量开关小车运动的标准,当开关小车运动至目标位置时,即可认为开关小车的运动操作已完成,此时,开关小车车体14能够用于改变高压开关柜的状态。
30.可选的,动力装置12是为开关小车提供驱动力的装置,具体的,动力装置12包括导轨磁铁,导轨磁铁用于接收主控装置11发送的电磁方向指令,并根据电磁方向指令控制导轨磁铁的极性,导轨磁铁提供的磁力与磁悬浮装置13提供的磁力相互作用产生动力,推动磁悬浮装置13运动。
31.其中,导轨磁铁由一节节带有极性的电磁铁组成,通电后,导轨磁铁会变成一节节带有n极和s极的电磁铁,导轨磁铁和磁悬浮装置13的励磁线圈两者在磁铁的吸引力和排斥力的相互作用下产生动力,推动磁悬浮装置13运动。
32.具体的,推动磁悬浮装置13的运动方向受主控装置11发送的电磁方向指令控制,不同的电磁方向指令会使导轨磁铁呈现不同的极性,从而控制磁悬浮装置13的运动方向,图2是本发明实施例提供的一种相互作用的磁力的结构示意图,从图2中可以看出,磁悬浮装置13的励磁线圈包括两组n极和s极并列的电磁铁,且每组均由一节n极和s极的电磁铁组成,导轨磁铁由一节节带有n极和s极的电磁铁组成,其中,导轨磁铁的n极(s极)与磁悬浮装置13磁铁的n极(s极)相互排斥,如图2中对外的双向箭头所示,导轨磁铁的s极(n极)与磁悬浮装置13磁铁的n极(s极)相互吸引,如图2中对内的双向箭头所示,在磁铁的排斥力和吸引力的相互作用下,会推动磁悬浮装置13的运动,运动方向如图2中加粗的箭头所示,导轨磁铁上的电磁铁和磁悬浮装置13的电磁铁会不断相互作用产生动力,推动磁悬浮装置13持续前进。
33.其中,导轨磁铁的电磁铁的极性受电磁方向指令控制,具体的,导轨磁铁中的电磁铁的极性可以是先n极后s极的排列方式,也可以是先s极后n极的排列方式,在与磁悬浮装置13的电磁铁相互作用时,不同的排列方式产生的吸引力和排除力亦不同,会推动磁悬浮装置13向不同的方向运动。
34.可选的,图3是本发明实施例提供的另一种应用于高压开关柜的开关小车的结构示意图,从图3可以看出,开关小车车体14是用于更改高压开关柜状态的装置,具体的,开关小车车体14包括小车触头,当开关小车车体14运动至目标位置时,小车触头会与高压开关柜接触,从而改变高压开关柜的状态。
35.其中,开关小车车体14包括多小车触头,小车触头用于与高压开关柜接触,当开关小车车体14运动至目标位置时,小车触头与高压开关柜接触,更改高压开关柜的状态。
36.具体的,小车触头的形状、大小及数量可根据高压开关柜的状态更改条件做相应调整,本发明实施例对此不进行限定。
37.图4是本发明实施例提供的又一种应用于高压开关柜的开关小车的结构示意图,从图4可知,应用于高压开关柜的开关小车还包括:距离检测装置15、环境检测装置16和报警装置17。
38.其中,开关小车上的距离检测装置15、环境检测装置16和报警装置17是可选的,可根据业务需求进行配置,具体的,距离检测装置15、环境检测装置16和报警装置17的配置数量可以是1个、3个、5个等,装置的配置情况可根据实际业务需求做相应调整,本发明实施例对此不进行限定。
39.可选的,距离检测装置15与开关小车车体14电连接,用于检测开关小车车体14与高压开关柜的距离,并将距离检测结果反馈至主控装置11;主控装置11用于根据距离检测结果确定开关小车是否运动至目标位置。
40.其中,主控模块11接收的设备控制指令中含有开关小车的运动距离,根据开关小车的运动距离即可确定开关小车运动至目标位置时开关小车车体14与高压开关柜的距离。
41.具体的,假设开关小车运动至目标位置时开关小车车体14与高压开关柜的距离应为x米,距离检测装置15会实时检测开关小车车体14与高压开关柜的距离,当反馈至主控装置11的距离检测结果为x米时,主控装置11会确定开关小车运动至目标位置。通过距离检测装置15检测开关小车车体14与高压开关柜的距离来确定开关小车是否运动至目标位置,减少了手动控制开关小车时由于控制精度不够而对小车触头造成的冲击和磨损,可以精准的实现开关小车的步进式推进,提高了设备的使用寿命。
42.可选的,环境检测装置16与开关小车车体14电连接,用于检测高压开关柜的内部环境。
43.其中,环境检测装置16包括温度检测仪161、湿度检测仪162、声纹检测仪163、烟雾检测仪164;温度检测仪161用于检测高压开关柜内部的温度;湿度检测仪162用于检测高压开关柜内部的湿度;声纹检测仪163用于检测高压开关柜内部的声波;烟雾检测仪164用于检测高压开关柜内部的烟雾。
44.具体的,环境检测装置16可以实时监测高压开关柜内部的温度、湿度、声波及烟雾信息,如若检测出高压开关柜内部存在异常温度、湿度、声波及烟雾等情况,能够及时制定并实施相应的解决措施,减少了因忽视高压开关柜内部环境的异常而导致的事故。
45.可选的,主控装置11还包括报警信息采集模块111;主控装置11用于若距离检测装置15检测到开关小车未运动至目标位置,将报警信息通过报警信息采集模块111发送至报警装置17,以控制报警装置17按照预设报警方式进行报警。
46.其中,报警信息包括开关小车的目标位置、当前位置等信息。
47.具体的,报警信息采集模块111采集到报警信息后,会确定报警信息对应的报警等级,基于报警等级生成对应的报警动作指令,基于报警动作指令控制报警装置17进行报警。其中,不同的报警信息对应不同的报警等级,不同的报警等级对应不同的报警方式(即不同的报警动作指令),报警装置17基于该报警方式进行报警,可以使用户根据报警情况了解对
应出现的问题及其严重程度,以便及时的、有针对性的解决问题。
48.本发明提供的应用于高压开关柜的开关小车包括:主控装置、磁悬浮装置、动力装置和开关小车车体;其中,主控装置用于接收服务器发送的设备控制指令,根据设备控制指令生成电磁方向指令,并发送至动力装置,控制动力装置提供动力,推动磁悬浮装置运动;开关小车车体置于磁悬浮装置上,磁悬浮装置用于带动开关小车车体运动至目标位置;开关小车车体用于改变高压开关柜的状态。解决了现有高压开关柜的控制方法的自动化程度低、控制精密不够,可靠性低,智能化程度不高的问题,能够精准、可靠、智能化的控制开关小车更改高压开关柜的状态。
49.图5是本发明实施例提供的一种应用于高压开关柜的开关小车的控制方法的流程示意图,该方法应用于图1所示的开关小车,如图5所示,该方法具体可以包括如下步骤:
50.s501、接收服务器发送的设备控制指令,设备控制指令包括开关小车的标识信息和控制数据。
51.其中,设备控制指令是服务器发送的一个设备控制信号,具体的,当有更改高压开关柜状态的需求时,可以通过服务器发送一个设备控制指令,以控制开关小车更改高压开关柜的状态。
52.具体的,开关小车的标识信息是开关小车的属性信息,例如可以是开关小车识别码,包括开关小车的生产厂家、年代、车型、车身型式代码等信息,其中,开关小车识别码与开关小车一一对应,用于识别开关小车的身份;控制数据是控制开关小车运动的数据信息,包括开关小车的运动距离、方向、速度、时间等信息,本发明实施例对此不进行限定。
53.s502、根据标识信息确定目标开关小车。
54.其中,目标开关小车是从候选开关小车中筛选出来的要执行更改高压开关柜状态的任务的开关小车。具体的,根据服务器发送的设备控制指令中的开关小车的标识信息即可确定出目标开关小车。
55.可选的,根据标识信息确定目标开关小车,包括:获取候选开关小车的标识码,标识码与候选开关小车一一对应;确定标识码与标识信息是否匹配;若标识码与标识信息匹配,则确定标识码对应的候选开关小车为目标开关小车。
56.具体的,有a、b、c三个候选开关小车,其中候选开关小车a的识别码为识别码1,候选开关小车b的识别码为识别码2,候选开关小车c的识别码为识别码3,根据服务器发送的设备控制指令中的开关小车的标识信息即可确定出目标开关小车,示例性的,如若设备控制指令中的开关小车的标识信息是识别码2,则目标开关小车为候选开关小车b,如若设备控制指令中的开关小车的标识信息是识别码3,那么,目标开关小车为候选开关小车c。
57.s503、确定目标开关小车是否满足启动条件,若满足,则根据控制数据控制目标开关小车运动。
58.其中,启动条件是判断目标开关小车是否能够运动的依据,包括目标开关小车当前无待执行任务、不处于故障状态等。
59.具体的,在确定目标开关小车后,会先检测目标开关小车的当前状态,看其是否处于等待执行任务的状态,若目标开关小车能即刻执行任务,则确定其满足启动条件,根据控制数据控制目标开关小车运动。
60.可选的,根据控制数据控制目标开关小车运动,包括:根据控制数据确定目标开关
小车的运行数据;其中,运行数据包括目标开关小车的运动方向、运动距离及目标位置;根据目标开关小车的运动方向和运动距离,控制目标开关小车运动。
61.具体的,目标开关小车的运动方向包括直行、左转、右转、后退等,运动距离是开关小车运动的路径数据,包括1米、3米、5米、10米等,本发明实施例对此不进行限定。
62.示例性的,如若根据控制数据确定目标开关小车的运动方向和运动距离为先直行3米,接着左转后直行4米,那么,将控制目标开关小车从当前位置开始先直行3米,接着左转后直行4米,目标开关小车停止运动后所处的位置即为目标位置。
63.可选的,控制目标开关小车运动之后,还包括:确定目标开关小车的最新位置与目标位置之间的距离长度;若距离长度大于预设阈值,则根据预设报警方式进行报警;接受服务器发送的报警处理信息和处理结果,并将目标开关小车的运行数据、报警信息、报警处理信息和处理结果进行存储。
64.其中,距离长度用来检测开关小车的运动情况,预设阈值为衡量开关小车的运动情况的标准,当距离长度大于预设阈值时,确定开关小车存在异常情况,不同的距离长度对应不同等级的异常,有不同的报警方式,能够使用户根据报警情况了解对应出现的问题及其严重程度,以便及时的、有针对性的解决问题。
65.具体的,在目标开关小车停止运动时,会获取目标开关小车在当前时刻的最新位置,判断其与目标位置之间的距离长度,若距离长度大于预设阈值,则根据不同的距离长度采取相应的报警方式进行报警,用以告知用户目标开关小车存在的异常。在用户进行异常处理后,服务器会将报警处理信息和处理结果反馈给开关小车控制系统,此时,开关小车控制系统会控制目标开关小车继续执行之前未成功完成的任务,并将目标开关小车的运行数据、报警信息、报警处理信息和处理结果进行存储,以便后期查阅。
66.本实施例的技术方案,通过接收服务器发送的设备控制指令,设备控制指令包括开关小车的标识信息和控制数据;根据标识信息确定目标开关小车;根据控制数据及目标开关小车的当前状态确定目标开关小车是否满足启动条件;若目标开关小车满足启动条件,则根据控制数据控制目标开关小车运动。解决了现有高压开关柜的控制方法的自动化程度低、控制精密不够,可靠性低,智能化程度不高的问题,能够精准、可靠、智能化的控制开关小车更改高压开关柜的状态。
67.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1