用于电机的爪极转子和用于电机的转子装置的制作方法
1.本技术涉及用于电机的爪极转子和用于电机的转子装置。
背景技术:
2.通常,电机包括定子以及可相对于定子移动的转子。电机能够以电动或发电方式工作,在电动方式中,电能被转换成动能,反之,在发电方式中,动能被转换成电能。在操作期间,转子的磁场与定子的磁场相互作用。
3.爪极转子通常包括两个具有爪极指状物的部件。爪极指状物构成爪极转子的磁极。通过爪极转子中的励磁线圈,转子中的磁通量可以增加,使得具有爪极转子的电机具有较高的扭矩。这意味着电机能够更有效地操作。
4.要解决的任务是提出一种用于电机的能够有效地操作的爪极转子。要解决的另一个任务是提出一种用于电机的能够有效地操作的转子装置。
技术实现要素:
5.这些任务通过独立权利要求的主题来解决。从属权利要求中指出了有利的配置和进一步的发展。
6.根据用于电机的爪极转子的至少一个实施例,爪极转子包括转子轭。转子轭可以包括转子芯。转子轭至少布置在爪极转子内的一些地方。至少在某些地方,转子轭是圆柱形的。此外,转子轭可包括第一环形部件和第二环形部件。转子轭可以包括铁磁材料,例如铁或钢。转子轭还可以包括软磁复合粉末材料。
7.爪极转子还包括至少两个第一爪极指状物和至少两个第二爪极指状物。从爪极转子的外部来看,爪极指状物各自可以具有近似平行四边形的形状。总的来说,每个爪极指状物可以具有弯曲的形状。在这种情况下,爪极指状物的弯曲形状分别沿着爪极转子的周向延伸。每个爪极指状物沿着爪极转子的纵向轴线可以比沿着爪极转子的周向延伸得远。爪极指状物可以布置在爪极转子的外侧处。爪极指状物可以包括与转子轭相同的材料。这意味着爪极指状物可以包括铁磁材料,例如铁或钢。爪极指状物还可以包括软磁复合粉末材料。第一爪极指状物各自可以具有相同的尺寸和形状。第二爪极指状物各自可以具有相同的尺寸和形状。所有爪极指状物,即第一和第二爪极指状物,分别还可以具有相同的尺寸和形状。爪极转子可以包括与第二爪极指状物相同数量的第一爪极指状物。
8.第一和第二爪极指状物各自与转子轭连接。这可以意味着第一和第二爪极指状物附接到转子轭。爪极指状物可以与转子轭形成为一体。可选地,爪极指状物各自可以是与转子轭连接的独立部件。第一爪极指状物可以与转子轭的第一环形部件连接。第二爪极指状物可以与转子轭的第二环形部件连接。
9.第一爪极指状物从爪极转子的第一侧朝向爪极转子的第二侧延伸。第二爪极指状物从第二侧朝向第一侧延伸。爪极转子的第一侧与爪极转子的第二侧相对。这意味着沿着爪极转子的纵向轴线,第一侧布置在爪极转子的一端处,第二侧布置在爪极转子的另一端
处。转子轭的第一环形部件可以布置在第一侧处。转子轭的第二环形部件可以布置在第二侧处。第一爪极指状物可以在第一侧处与转子轭连接。第二爪极指状物可以在第二侧处与转子轭连接。第一和第二爪极指状物可以具有平行于爪极转子的纵向轴线延伸的主延伸方向。
10.第一爪极指状物和第二爪极指状物可以沿着爪极转子的周向交替布置。这意味着每个第一爪极指状物沿着爪极转子的周向布置在两个第二爪极指状物之间。同样,每个第二爪极指状物沿着爪极转子的周向布置在两个第一爪极指状物之间。在这种情况下,每个第一爪极指状物被布置成与相应的相邻第二爪极指状物间隔开。这意味着在每种情况下,在一个第一爪极指状物和一个第二爪极指状物之间都存在间隙。
11.第一爪极指状物可以具有从第一侧到第二侧逐渐变细的形状。第二爪极指状物可以具有从第二侧到第一侧逐渐变细的形状。在这种情况下,爪极指状物的延伸分别沿着爪极转子的周向逐渐变细。此外,或者可选地,第一爪极指状物的形状可以分别逐渐变细,使得爪极转子的第一侧处的第一爪极指状物在穿过爪极转子的截面的径向方向上具有比在未布置在第一侧处的位置处更大的延伸。此外,或者可选地,第二爪极指状物的形状可以分别逐渐变细,使得爪极转子的第二侧处的第二爪极指状物在穿过爪极转子的截面的径向方向上具有比在未布置在第二侧的位置处更大的延伸。
12.在第一侧处,一个第一磁体分别设置在第一爪极指状物之间。这意味着在两个第一爪极指状物之间,一个第一磁体分别布置在第一侧处。因此,爪极转子整体上包括与第一爪极指状物一样多的第一磁体。第一磁体各自沿着爪极转子的周向布置在两个第一爪极指状物之间。第一磁体可以布置成与第一爪极指状物间隔开。这可以意味着在每种情况下,在每个第一磁体与相邻的第一爪极指状物之间都保留有间隙。每个第一磁体可以是永磁体。在爪极转子外侧观察时,第一磁体各自可以具有近似矩形的形状。第一磁体可以沿着爪极转子的周向具有弯曲形状。在穿过爪极转子的截面中,第一磁体在第一侧可以具有与第一侧的第一爪极指状物相同的沿径向方向的延伸。
13.在第二侧处,一个第二磁体分别设置在第二爪极指状物之间。这意味着在每种情况下,一个第二磁体布置在两个第二爪极指状物之间的第二侧处。因此,爪极转子整体上具有与第二爪极指状物相同数量的第二磁体。第二磁体各自沿着爪极转子的周向布置在两个第二爪极指状物之间。第二磁体可以布置成与第二爪极指状物间隔开。这可以意味着在每种情况下,在每个第二磁体与相邻的第二爪极指状物之间都保留有间隙。每个第二磁体可以是永磁体。在爪极转子外侧观察时,每个第二磁体可以具有近似矩形的形状。第二磁体可以沿着爪极转子的周向具有弯曲形状。在穿过爪极转子的截面中,第二磁体在第二侧可以具有与第二侧的第二爪极指状物相同的沿径向方向的延伸。
14.第一磁体各自可以具有相同的形状和尺寸。每个第二磁体可以具有相同的形状和尺寸。所有磁体,即第一和第二磁体,分别还可以具有相同的形状和尺寸。
15.当电机运行时,在第一侧附接第一磁体以及在第二侧附接第二磁体导致使用爪极转子的电机的气隙内的磁通量增加。因此,每个第一磁体都有助于磁化相邻的两个第二爪极指状物中的每一个,并且每个第二磁体都有助于磁化相邻的两个第一爪极指状物中的每一个。爪极转子的磁极由爪极指状物形成。增强的磁通量导致电机的扭矩增加。因此,电机能够更有效地运行。
16.第一磁体和第二磁体布置在通常不用于增强磁通量的位置处。由于第一磁体布置在第一爪极指状物之间的自由安装空间中,第二磁体布置在第二爪极指状物之间的自由安装空间中,因此爪极转子的安装空间被更有效地利用。第一和第二磁体有助于增强气隙内的磁通量。通过附接第一和第二磁体,爪极指状物之间的安装空间也被用于增强磁通量。因此,在无需扩大爪极转子的情况下能够提高使用爪极转子的电机的效率。
17.根据爪极转子的至少一个实施例,第一和第二磁体各自附接到转子磁轭。第一磁体在爪极转子的第一侧处附接到转子轭,第二磁体在爪极转子的第二侧处附接到转子轭。第一磁体可以附接到转子轭的第一环形部件。第二磁体可以附接到转子轭的第二环形部件。第一磁体和第二磁体每个都可以胶合到转子轭上。转子轭提供高稳定性,使得第一和第二磁体可以有利地以稳定的方式附接到转子轭。这使得第一磁体能够布置成与第一爪极指状物间隔开,并且第二磁体能够布置成与第二爪极指状物间隔开。因此,避免了转子轭中的磁通泄漏。
18.根据爪极转子的至少一个实施例,第一磁体和第二磁体的磁化方向在穿过爪极转子的截面中分别平行于径向方向延伸。在穿过爪极转子的截面中,径向方向从爪极转子的中心点延伸到爪极转子的外侧。第一磁体的磁化方向彼此不同。因此,在穿过爪极转子的截面中,每个第一磁体的磁化方向在第一磁体的相应位置处分别平行于径向方向延伸。这意味着在穿过爪极转子的截面中,每个第一磁体的磁化方向可以从外侧朝向爪极转子的中心点延伸,或者从中心点朝向外侧延伸。
19.在穿过爪极转子的截面中,每个第二磁体的磁化方向在第二磁体的相应位置处分别平行于径向方向延伸。这意味着每个第二磁体的磁化方向在穿过爪极转子的截面中都可以从外侧朝向爪极转子的中心点或者从中心点朝向外侧延伸。借助于第一和第二磁体,可以增强气隙内的磁通量,对于第一和第二磁体,磁化方向在穿过爪极转子的截面中分别平行于径向方向延伸。因此,具有爪极转子的电机可以更有效地运行。
20.根据爪极转子的至少一个实施例,在穿过爪极转子的截面中,第一磁体的磁化方向分别平行于径向方向朝向爪极转子的中心点延伸,并且第二磁体的磁化方向在穿过爪极转子的截面中分别平行于径向方向远离爪极转子的中心点延伸。这意味着第一磁体的磁化方向彼此不同,并且都指向爪极转子的中心点。第二磁体的磁化方向同样彼此不同,并且均远离爪极转子中心点的方向。这意味着第二磁体的磁化方向指向爪极转子的外侧。以这种方式,气隙内的磁通量可以通过第一和第二磁体增强。因此,具有爪极转子的电机可以更有效地运行。
21.根据爪极转子的至少一个实施例,第二磁体的磁化方向在穿过爪极转子的截面中分别平行于径向方向朝向爪极转子的中心点延伸,并且第一磁体的磁化方向在穿过爪极转子的截面中分别平行于径向方向远离爪极转子的中心点延伸。这意味着第二磁体的磁化方向彼此不同,并且都指向爪极转子的中心点。第一磁体的磁化方向同样彼此不同,并且都指向远离爪极转子中心点的方向。这意味着第一磁体的磁化方向指向爪极转子的外侧。以这种方式,气隙内的磁通量可以通过第一和第二磁体增强。因此,具有爪极转子的电机可以更有效地运行。
22.根据爪极转子的至少一个实施例,励磁线圈在爪极转子中被布置在转子轭与第一爪极指状物和第二爪极指状物之间。在穿过爪极转子的截面中,励磁线圈一方面布置在第
一爪极指状物和第二爪极指状物之间,另一方面布置在转子轭之间。励磁机线圈配置为直流供电。励磁线圈可以具有空心圆柱体的形状。励磁线圈被布置成与第一和第二爪极指状物间隔开。这意味着励磁线圈与第一和第二爪极指状物之间留有间隙。由于使用了励磁线圈,因此当电机运行时,气隙内的磁通量可以进一步增强。
23.根据爪极转子的至少一个实施例,第一爪极指状物和第二爪极指状物各自沿着爪极转子的纵向轴线的延伸短于整个爪极转子。因此,第一和第二爪极指状物各自不在爪极转子的整个长度上延伸。这意味着第一爪极指状物不完全从第一侧延伸到第二侧。第二爪极指状物不完全从第二侧延伸到第一侧。在爪极转子的这种结构中,分别在第一爪极指状物之间和分别在第二爪极指状物之间为第一和第二磁体保留空间。因此,第一和第二磁体各自可以有利地在爪极指状物之间附接到转子轭。
24.根据爪极转子的至少一个实施例,第一和第二爪极指状物各自沿着爪极转子的纵向轴线的延伸最多与整个爪极转子相同。这意味着第一和第二爪极指状物可以具有与爪极转子相同的长度。在这种情况下,第一和第二磁体各自可以具有用于容纳爪极指状物的一部分的凹部。或者,第一和第二爪极指状物沿爪极转子的纵向轴线比爪极转子短。在每种情况下,第一和第二爪极指状物被布置成使得为第一和第二磁体保留安装空间。因此,当电机运行时,第一和第二磁体可以有利地有助于增强气隙内的磁通量。
25.根据爪极转子的至少一个实施例,第一和第二磁体各自沿爪极转子的纵向轴线的延伸短于第一和第二爪极指状物。每个第一磁体可以布置在爪极转子的第一侧的剩余安装空间中,并且每个第二磁体可以布置在爪极转子的第二侧的剩余安装空间中。因此,爪极转子的安装空间被有效地利用。
26.根据爪极转子的至少一个实施例,每个第一磁体与第二爪极指状物之一直接接触,并且每个第二磁体与第一爪极指状物之一直接接触。对于每个第一爪极指状物,在其指向爪极转子的第二侧的一侧处布置有一个第二磁体。在这种情况下,每个第二磁体可以与第一爪极指状物齐平。同样,每个第二爪极指状物在其指向爪极转子的第一侧的一侧处布置有一个第一磁体。在这种情况下,第一磁体各自可以与第二爪极指状物齐平。
27.借助于垂直于穿过爪极转子的截面延伸的表面,第一磁体每个都可以与第二爪极指状物之一直接接触。在第一磁体与第二爪极指状物之一直接接触的位置处,相应的第一磁体和相应的第二爪极指状物沿着爪极转子的周向具有相同的延伸。沿着爪极转子的纵向轴线的一个第一磁体的长度和一个第二磁体的长度之和可以对应于爪极转子的整个长度。借助于垂直于穿过爪极转子的截面延伸的表面,第二磁体每个都可以与第一爪极指状物之一直接接触。在第二磁体与第一爪极指状物之一直接接触的位置处,相应的第二磁体和相应的第一爪极指状物沿着爪极转子的周向具有相同的延伸。沿着爪极转子的纵向轴线的一个第二磁体的长度和一个第一爪极指状物的长度之和可以对应于爪极转子的整个长度。
28.由于每个第一磁体与第二爪极指状物之一直接接触,并且每个第二磁体与第一爪极指状物之一直接接触,因此第一和第二磁体以有效的方式有助于增强气隙内的磁通量。
29.根据爪极转子的至少一个实施例,第一和第二磁体各自具有凹部,爪极指状物之一的一部分布置在该凹部中。这意味着第一磁体每个都具有凹部,第二爪极指状物之一的一部分布置在该凹部中。第二磁体每个都具有凹部,第一爪极指状物之一的一部分布置在该凹部中。每个凹部可以适应第一和第二爪极指状物的形状。在该实施例中,第一和第二爪
极指状物沿着爪极转子的纵向轴线的延伸可以与爪极转子相同。此外,一个第一磁体的长度和一个第二爪极指状物的长度之和可以大于爪极转子沿其纵向轴线的长度。同样,一个第二磁体的长度和一个第一爪极指状物的长度之和可以大于爪极转子沿其纵向轴线的长度。为此,一个第一磁体和一个第二爪极指状物各自在第一磁体的凹部区域内同轴延伸。同样,一个第二磁体和一个第一爪极指状物各自在第二磁体的凹部区域内同轴延伸。通过这种布置,爪极转子的安装空间可以有效地利用。此外,爪极转子的稳定性通过这种布置得到增强。因此,通过分别将爪极指状物的一部分布置在相应的凹部中,爪极转子的稳定性总体上得以提高。
30.根据爪极转子的至少一个实施例,第一磁体的数量和第二磁体的数量之和等于爪极转子的磁极数量。爪极转子能够包括与第二磁体相同数量的第一磁体。通过第一和第二磁体的这种布置,当电机运行时,气隙内的磁通量被有利地增强。
31.此外,还提出了一种用于电机的转子装置。根据转子装置的至少一个实施例,转子装置包括此处描述的爪极转子中的至少两个。因此,所述爪极转子的所有特征也被公开用于转子装置,反之亦然。两个爪极转子可以以防扭转的方式彼此连接。两个爪极转子可以彼此直接接触。爪极转子中的一个布置在另一个爪极转子的第一侧或第二侧处。该至少两个爪极转子可以具有相同的结构。通过这种转子装置,气隙内的磁通量可以有利地进一步增强。此外,转子装置的整个长度可以增加。
32.根据转子装置的至少一个实施例,转子装置的爪极转子中的至少两个具有彼此不同的结构。这意味着两个爪极转子中的第一个具有不同于第二个爪极转子的结构。这意味着爪极转子的不同实施例的优点可以结合起来。
附图说明
33.在下文中,将结合示例性实施例和相关附图更详细地解释此处描述的爪极转子和转子装置。
34.在图1a和图1b中,示出了穿过电机示例的一部分的示意性截面。
35.在图2a和图2b中,示出了爪极转子的示例性实施例。
36.基于图3a、图3b和图3c,描述了爪极转子的示例性实施例的部分。
37.基于图4a、图4b和图4c,描述了爪极转子的另一示例性实施例。
38.基于图5a、图5b、图5c和图5d,描述了爪极转子的另一示例性实施例。
39.在图6a中,示出了转子装置的示例性实施例。
40.在图6b和6c中,示出了转子装置的另一示例性实施例。
41.在图7中,示出了穿过具有爪极转子的示例性实施例的电机的一部分的示意性截面。
具体实施方式
42.在图1a中,示出了穿过电机11的示例的一部分的示意性截面。电机11不是示例性实施例。电机11包括定子24和爪极转子10。爪极转子10不是示例性实施例。定子24具有多个槽26,多个槽中布置有电绕组25。在定子24内布置有爪极转子10。爪极转子10包括励磁线圈21。
43.在图1b中,示出了图1a的爪极转子10的切口。在这种情况下,示出了励磁线圈21布置在爪极指状物13、14与转子轭12之间。
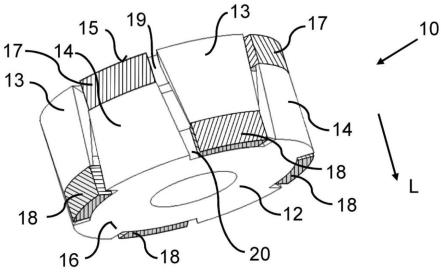
44.在图2a中,示出了用于电机11的爪极转子10的示例性实施例。爪极转子10包括转子轭12、四个第一爪极指状物13和四个第二爪极指状物14。第一爪极指状物13和第二爪极指状物14均与转子轭12连接。转子轭12包括第一环形部件19和第二环形部件20。第一爪极指状物13与第一环形部件19连接。第二爪极指状物14与第二环形部件20连接。第一爪极指状物13从爪极转子10的第一侧15朝向爪极转子10的第二侧16延伸。第二爪极指状物14从第二侧16朝向第一侧15延伸。第一环形部件19布置在第一侧15处,第二环形部件20布置在第二侧16处。第一环形部件19是转子轭12的以环的形式布置在第一侧15处的那部分。第二环形部件20是转子轭12的以环的形式布置在第二侧16处的那部分。在图2a中能够看到第一环形部件19位于第一爪极指状物13之间。第二环形部件20与第二爪极指状物14一体地示出。然而,第二爪极指状物14也可以是单独的部件。这同样适用于第一环形部件19和第一爪极指状物13。第一爪极指状物13和第二爪极指状物14各自沿爪极转子10的纵向轴线l的延伸短于整个爪极转子10。
45.一个第一磁体17分别布置在第一爪极指状物13之间的第一侧15处。一个第二磁体18分别布置在第二爪极指状物14之间的第二侧16处。因此,爪极转子10整体上包括四个第一磁体17和四个第二磁体18。第一磁体17和第二磁体18分别附接到转子轭12。因此,第一磁体17附接到第一环形部件19,第二磁体18附接到第二环形部件20。每个第一磁体17与第二爪极指状物14之一直接接触。每个第二磁体18与第一爪极指状物13之一直接接触。一个第一磁体17的长度和一个第二爪极指状物14的长度之和等于爪极转子10的整个长度。同样,一个第二磁体18的长度和一个第一爪极指状物13的长度之和等于爪极转子10的整个长度。第一磁体17和第二磁体18各自沿着爪极转子10的纵向轴线l的延伸比第一爪极指状物13和第二爪极指状物14各自沿着爪极转子10的纵向轴线l的延伸短。因此,爪极转子10的安装空间被有效地用于产生扭矩。
46.在图2b中,示出了图2a的爪极转子10的示例性实施例。在这种情况下,第一磁体17和第二磁体18的磁化方向例如通过箭头来示出。第一磁体17和第二磁体18的磁化方向在穿过爪极转子10的截面中分别平行于径向方向r延伸。在这种情况下,第一磁体17的磁化方向在穿过爪极转子10的截面中朝着爪极转子10的中心点延伸。这意味着四个第一磁体17的磁化方向在不同的方向上延伸。第二磁体18的磁化方向在穿过爪极转子10的截面中远离爪极转子10的中心点延伸。这意味着第二磁体18的磁化方向在穿过爪极转子10的截面中从爪极转子10的中心点延伸到外侧27。在这种布置中,每个第一磁体17磁化相邻的两个第一爪极指状物13。此外,每个第二磁体18磁化相邻的两个第二爪极指状物14。这导致第一磁体17的数量和第二磁体18的数量之和等于爪极转子10的磁极的数量。
47.在图3a中,示出了图2a的爪极转子10的示例性实施例的截面图。第一爪极指状物13和第二爪极指状物14均附接到转子轭12,该转子轭12位于爪极转子10内的一些地方。转子轭12从第一侧15延伸到第二侧16。还示出了第一磁体17如何附接到转子轭12。第一磁体17附接到第一环形部件19。第一环形部件19在一些地方沿着爪极转子10的纵向轴线l延伸。第一磁体17沿着爪极转子10的纵向轴线l恰好延伸至第一环形部件19。这同样适用于第二磁体18和第二环形部件20。
48.在图3b中,示出了图2a的爪极转子10的示例性实施例的另一截面图。在这种情况下,示出了具有第一爪极指状物13的第一环形部件19。作为示例,示出了一个第一磁体17。第一磁体17在第一环形部件19处布置在两个第一爪极指状物13之间。
49.在图3c中,示出了图2a的爪极转子10的示例性实施例的另一截面图。在这种情况下,具有第一爪极指状物13的第一环形部件19如图3b所示。一个第一磁体17分别沿第一环形部件19的周向布置在两个第一爪极指状物13之间。
50.在图4a中,示出了爪极转子10的另一示例性实施例。爪极转子10显示为处于拆卸状态。这仅用于说明目的。与图2a所示的示例性实施例的唯一区别在于,励磁线圈21在爪极转子10中被布置在转子轭12与第一爪极指状物13和第二爪极指状物14之间。励磁线圈21具有近似空心圆柱体的形状。励磁线圈21可以围绕转子轭12的一部分缠绕,例如转子芯。在沿径向r穿过爪极转子10的截面中,励磁线圈21布置在转子轭12与第一和第二爪极指状物13、14之间。
51.在图4b中,示出了图4a所示爪极转子10的示例性实施例的截面图。在这种情况下,爪极转子10显示为处于组装状态。励磁线圈21布置成与第一爪极指状物13和第二爪极指状物14间隔开。此外,励磁线圈21布置成与第一和第二环形部件19、20间隔开。
52.在图4c中,图4a所示的爪极转子10的示例性实施例显示为处于组装状态。
53.在图5a中,示出了爪极转子10的另一示例性实施例的截面图。在这种情况下,第一爪极指状物13和第二爪极指状物14沿着爪极转子10的纵向轴线l的延伸最多与整个爪极转子10相同。一个第一或第二爪极指状物13、14的长度和一个第一或第二磁体17、18的沿爪极转子10的纵向轴线l的长度之和大于爪极转子10的整个长度。这意味着,一个第一爪极指状物13分别在一些地方与一个第二磁体18同轴延伸。一个第二爪极指状物14分别在一些地方与一个第一磁体17同轴延伸。与图4c所示的示例性实施例相反,第一磁体17和第二磁体18各自具有凹部22,爪极指状物13、14之一的一部分布置在凹部22中。凹部22分别可以适应第一爪极指状物13和第二爪极指状物14的形状。这意味着第一磁体17各自具有用于容纳第二爪极指状物14的一部分的凹部22。第二磁体18各自具有用于容纳第一爪极指状物13的一部分的凹部22。凹部可以适应爪极指状物13、14,使得在爪极转子10的外侧处,第一磁体17和第二磁体18各自与布置在其中的第一爪极指状物13和第二爪极指状物14齐平。第一爪极指状物13和第二爪极指状物14布置在凹部22中,使得第一爪极指状物13和第二爪极指状物14的一侧分别没有第一磁体17和第二磁体18。这意味着第一爪极指状物13和第二爪极指状物14通过它们的一侧不与第一和第二磁体17、18接触。
54.在图5b中,示出了图5a的示例性实施例的一个第一磁体17。第一磁体17具有凹部22。凹部22部分地,即不完全地延伸穿过第一磁体17。图5a的示例性实施例的第二磁体18同样可以具有图5b所示的结构。
55.在图5c中,示出了图5a所示的示例性实施例的一部分。示出了安装有第一爪极指状物13的第一环形部件19。具有凹部22的第一磁体17同样安装在第一环形部件19上。具有第二爪极指状物14和第二磁体18的第二环形部件20同样可以具有图5c所示的结构。
56.在图5d中,示出了图5a的示例性实施例。在这种情况下,示出了整个爪极转子10。
57.在图6a中,示出了转子装置23的示例性实施例。转子装置23包括两个爪极转子10。两个爪极转子10各自具有图4c所示的结构。在两个爪极转子10之间的连接平面中,一个爪
极转子10的第一磁体17分别直接邻接另一个爪极转子10的第二磁体18。同样,一个爪极转子10的第一爪极指状物13直接邻接另一个爪极转子10的第二爪极指状物14。两个爪极转子10彼此直接接触。
58.在图6b中,示出了转子装置23的另一示例性实施例。与图6a所示的示例性实施例的唯一区别在于,两个爪极转子10都具有图5d所示的结构。
59.在图6c中,示出了转子装置23的另一示例性实施例。转子装置23包括两个爪极转子10。两个爪极转子10具有彼此不同的结构。爪极转子10中的一个具有图4a所示的结构,爪极转子10中的另一个具有图5a所示的结构。
60.在图7中,示出了穿过具有爪极转子10的示例性实施例的电机11的一部分的示意性截面。爪极转子10是图5d所示的示例性实施例。爪极转子10布置在电机11的定子24内。定子24具有多个槽26,多个槽中布置有电绕组25。
61.附图标记列表
62.10:爪极转子
63.11:电机
64.12:转子轭
65.13:第一爪极指状物
66.14:第二爪极指状物
67.15:第一侧
68.16:第二侧
69.17:第一磁体
70.18:第二磁体
71.19:第一环形部件
72.20:第二环形部件
73.21:励磁线圈
74.22:凹部
75.23:转子装置
76.24:定子
77.25:电绕组
78.26:槽
79.27:外侧
80.l:纵向轴线
81.r:径向方向
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1