一种机器人自主充电机构的制作方法
1.本发明涉及充电桩技术领域,尤其是涉及一种机器人自主充电机构。
背景技术:
2.随着机器人技术的不断发展,对机器人的自主运行能力提出了更高的要求,而自主充电功能是保证机器人智能化的重要基础。因此,如何为机器人快速地提供安全可靠的动力能源,以尽可能提高机器人自主作业时间,是当前亟待解决的技术问题。
3.目前,在针对机器人的自主充电机构设计中,例如,专利号cn108832397a“移动机器人及其移动机器人充电机构”,阐述了能自动调整角度与位移偏差的充电机构,利用调整弹性件配合移动机器人本体端来改变充电触头的位置状态,使车体触头与充电柱触头可靠贴合,但其没有考虑移动机器人的宽度尺寸,若移动机器人宽度尺寸很大,其机器人本体端的触头又没有伸缩功能,很容易发生机器人本体外壳先与充电端外壳触碰干涉,而两者触头并未接触。
4.再比如,专利号cn112803535a“一种移动机器人快速自动充电机构模组”、专利号cn105811507b“一种机器人充电机构,应用该机构的机器人以及充电方法”,则在充电触头后端添加了伸缩机构,保证机器人本体在较大偏转角度下也不会与充电端外壳触碰干涉,但均没有阐述充电桩触头在未充电状态下,如何保证充电桩触头不带电,以减少安全隐患,且均没有阐述两者触头是在保证接触可靠后再通电的充电逻辑,若贴合即充电,容易在贴合瞬间产生火花,损坏机器人的电器设备。
技术实现要素:
5.为克服现有技术缺点,本发明目的在于提供一种机器人自主充电机构,以解决上述背景技术中提到的问题。
6.为实现上述目的,本发明采用以下技术方案:
7.一种机器人自主充电机构,包括充电伸缩端、底座、电控柜和机器人本体端,所述充电伸缩端和电控柜均固定安装在底座上;所述充电伸缩端包括充电端底板、固定在充电端底板上的充电端箱盖和设于充电端箱盖和充电端底板所组成的箱体内部的充电头,以保证充电头在未使用情况下被完全包裹在箱体内部。
8.优选地,所述充电头由充电端铜极、充电端铜极固定座、充电端延长块、充电端支座和多根第一弹簧组成;所述充电端铜极通过第一弹簧安装在充电端铜极固定座上,以保证充电端铜极能够上下浮动;所述充电端铜极固定座通过充电端延长块与充电端支座固定连接。
9.更优选地,所述充电头还包括充电端支座,所述充电端支座通过导轨组件安装在充电端底板上;所述丝杠电机通过丝杠电机固定座固定安装在充电端底板上;通过丝杠电机带动充电端铜极往复运动,实现充电头的前后伸缩。
10.更优选地,所述充电头还包括滑触头活动铜极,所述滑触头活动铜极固定在滑触
头活动铜极固定座上,并在两者之间安装第二弹簧,以保证滑触头活动铜极具备上下浮动功能;所述滑触头活动铜极固定座通过滑块固定座安装在导轨组件,通过丝杠电机驱动实现前后移动。
11.更优选地,所述第一限位开关和第二限位开关安装在充电端底板上;当滑块固定座随丝杠电机前后伸缩时,第一限位开关和第二限位开关用于检测滑块固定座的移动位置,提升充电可靠性。
12.更优选地,所述充电头还包括滑触头铜极,所述滑触头铜极通过滑触头铜极固定座安装在充电端底板上;所述滑触头铜极外接电源正负极,并在外部安装滑触头铜极保护罩,以防漏电。
13.优选地,所述机器人本体端包括了机器人本体充电单元、机器人本体和第二传感器;所述机器人本体充电单元由导向柱、多根第三弹簧、机器人端铜极防护块、机器人端铜极固定座、机器人端铜极、导向柱固定座组成;所述机器人端铜极固定在机器人端铜极固定座上,且机器人端铜极固定座安装在机器人本体上;所述导向柱固定在导向柱固定座上,第三弹簧套在导向柱上并穿入机器人端铜极防护块的孔内;将机器人端铜极防护块嵌入机器人端铜极固定座槽内,并保证导向柱固定座与机器人端铜极固定座的相对位置,以确保在未充电情况下,机器人端铜极防护块遮住机器人端铜极而不外露,减少安全隐患。
14.更优选地,所述电控柜包括电控柜箱体和设在电控柜箱体上的第一传感器,所述机器人本体上安装有第二传感器;在进行自主充电作业时,所述第一传感器与第二传感器的固定位置相互对齐,以用于触发充电指令。
15.更优选地,还包括高度调节座,所述高度调节座由充电座垫高块、第一升降调节块、调节螺杆第二升降调节块组成。充电座垫高块与第一升降调节块固定连接,作为高度调节底座。调节螺杆旋拧在第一升降调节块的螺纹孔中,可通过旋转实现上下伸缩。第二升降调节块顶在调节螺杆上面,通过调节螺杆调整到合适高度后,将第二升降调节块与第一升降调节块固定连接。同时,充电端底板固定在第二升降调节块上,实现充电伸缩端的整体高度调节功能。
16.更优选地,所述充电座垫高块和电控柜箱体分别固定在底座上,所述底座上开设有地脚螺栓孔,以在现场安装时使用。
17.与现有技术相比,本发明的有益效果如下:
18.本发明提供的一种机器人自主充电机构,可以利用可伸缩单元保证充电端铜极具备可靠行程,避免机器人本体在较大偏转角度下充电对接时与充电端外壳触碰干涉;同时在充电伸缩端内部,设计了一对滑触头铜极,确保未充电时充电端铜极不带电;设计的高度调节座可适配现场安装环境来灵活调整充电端铜极高度,保证机器人自主对接可靠;并搭配辅助的电控柜设备,保证在两两铜极接触可靠后再通电的充电逻辑。
19.相较现有的机器人自主充电机构,本机构在兼顾了机器人自动充电的定位误差和设备安装工况差异下,合理布局检测传感器并设计相应铜极保护装置,保证了整个自主充电设备百分百的成功率。
附图说明
20.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的
附图作简单介绍,显而易见,下面描述中的附图仅仅是本发明的一些实施例,对本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
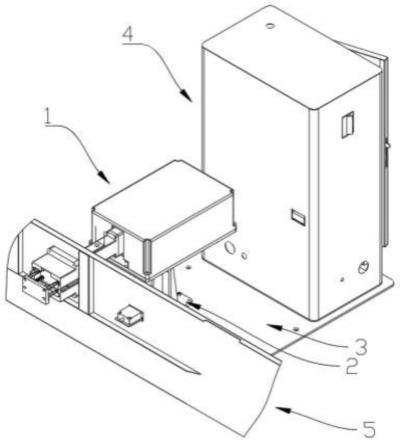
21.图1为本发明的整体示意图;
22.图2为本发明的除机器人本体端的示意图;
23.图3为本发明的充电伸缩端运动状态示意图;
24.图4为本发明的充电伸缩端内部装配结构示意图;
25.图5为本发明的充电伸缩端铜极配合示意图;
26.图6为本发明的高度调节座、电控柜和底座之间的装配示意图;
27.图7为本发明的机器人端装配结构示意图;
28.图8为本发明的运动状态示意图;
29.图9为本发明的第一传感器和第二传感器的安装示意图。
30.图中,各附图标记为:
31.1-充电伸缩端;101-充电端箱盖;102-充电端底板;103-充电端铜极;104-充电端铜极固定座;105-充电端延长块;106-充电端支座;107-滑块固定座;108-丝杆螺母固定块;109-丝杠电机螺母;110-电机驱动器;111-驱动器固定块;112-丝杠电机;113-丝杠电机固定座;114-导轨组件;115-第一限位开关;116-滑触头活动铜极;117-滑触头活动铜极固定座;118-滑触头铜极;119-滑触头铜极保护罩;120-滑触头铜极固定座;121-第二限位开关;122-第一弹簧;123-第二弹簧;2-高度调节座;201-充电座垫高块;202-第一升降调节块;203-调节螺杆;204-第二升降调节块;3-底座;301-底板;4-电控柜;401-电控柜箱体;402-第一传感器;5-机器人本体端;501-机器人本体;502-导向柱;503-第三弹簧;504-机器人端铜极防护块;505-机器人端铜极固定座;506-机器人端铜极;507-导向柱固定座;508-第二传感器。
具体实施方式
32.为了更清楚地说明本发明,下面结合实施例并对照附图对本发明作进一步详细说明。本领域技术人员应当理解,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本发明的保护范围。
33.在本发明的描述中,需要说明的是,术语“内”、“外”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,除非另有明确的规定和限定,术语“安装”、“连接”等应做广义理解,例如,可以是固定连接,可以是可拆卸连接,也可以是一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,可以通过中间媒介间接相连,也可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
34.实施例:
35.如图1-9所示的一种机器人自主充电机构,包括充电伸缩端1、底座3、电控柜4和机器人本体端5;充电伸缩端1包括充电端底板102、固定在充电端底板102上的充电端箱盖101和设于充电端箱盖101和充电端底板102所组成的箱体内部的充电头,以保证充电头在未使
用情况下被完全包裹在箱体内部。
36.充电头由充电端铜极103、充电端铜极固定座104、充电端延长块105、充电端支座106和多根第一弹簧122组成;充电端铜极103通过第一弹簧122安装在充电端铜极固定座104上,以保证充电端铜极103能够上下浮动。
37.充电端铜极固定座104通过充电端延长块105与充电端支座106固定连接;充电端支座106安装在滑块固定座107上,滑块固定座107又固定在导轨组件114上,丝杠电机112安装在丝杠电机固定座113上,同时电机驱动器110和驱动器固定块111安装在丝杠电机固定座113上,以保证结构紧凑性。丝杠螺母固定块108安装在滑块固定座107上,通过丝杠电机112带动丝杠电机螺母109往复运动,实现充电头的前后伸缩。
38.滑触头活动铜极116固定在滑触头活动铜极固定座117上,并在两者之间安装第二弹簧123,保证滑触头活动铜极116具备上下浮动功能。同时,滑触头活动铜极固定座117安装在滑块固定座107上,随丝杠电机112的驱动,实现前后移动。
39.滑触头铜极118固定在滑触头铜极固定座120上,并且滑触头铜极固定座120安装在充电端底板102上。滑触头铜极118外接电源正负极,并在外部安装了滑触头铜极保护罩119,以防漏电。
40.第一限位开关115和第二限位开关121安装在充电端底板102上。通过合理布局第一限位开关115和第二限位开关121的位置,当滑块固定座107随丝杠电机112前后伸缩时,用于检测是否移动到位,提升充电可靠性。
41.机器人本体端5包括了机器人本体充电单元、机器人本体501和第二传感器508。其中,机器人本体充电单元由导向柱502、若干第三弹簧503、机器人端铜极防护块504、机器人端铜极固定座505、机器人端铜极506、导向柱固定座507组成。机器人端铜极506固定在机器人端铜极固定座505上,且机器人端铜极固定座505安装在机器人本体501上。导向柱502固定在导向柱固定座507上,其第三弹簧503套在导向柱502上,并穿入机器人端铜极防护块504的孔内。将机器人端铜极防护块504嵌入机器人端铜极固定座505槽内,并保证导向柱固定座507与机器人端铜极固定座505的相对位置,以确保在未充电情况下,机器人端铜极防护块504遮住机器人端铜极506而不外露,减少安全隐患。
42.电控柜4包括电控柜箱体401和设在电控柜箱体401上的第一传感器402,机器人本体501上安装有第二传感器508;在进行自主充电作业时,第一传感器402与第二传感器508的固定位置相互对齐,以用于触发充电指令。
43.还包括高度调节座2,高度调节座2由充电座垫高块201、第一升降调节块202、调节螺杆203、第二升降调节块204组成。充电座垫高块201与第一升降调节块202固定连接,作为高度调节底座。调节螺杆203旋拧在第一升降调节块202的螺纹孔中,可通过旋转实现上下伸缩。第二升降调节块204顶在调节螺杆203上面,通过调节螺杆203调整到合适高度后,将第二升降调节块204与第一升降调节块202固定连接。同时,充电端底板102固定在第二升降调节块204上,实现充电伸缩端1的整体高度调节功能。
44.当需要调节充电伸缩端1的高度时,先松开第一升降调节块202与第二升降调节块204之间的固定螺丝,通过旋拧调节螺杆203调节至合适高度后再拧紧两调节块之间的固定螺丝,从而可实现一定范围高度调整。
45.底座3包括底板301,充电座垫高块201和电控柜箱体401分别固定在底板301上,底
板301上开设有地脚螺栓孔,以在现场安装时使用。
46.弥补机器人自主充电时的定位误差的方法如下:如图8和9所示,保证充电端铜极103的长度尺寸l1大于机器人端铜极506的尺寸l2,可以解决机器人移动过程中的前后定位误差;保证充电端铜极固定座104的宽度尺寸b1小于机器人端铜极固定座505的尺寸b2,可以解决机器人移动过程中的左右定位误差及偏转误差。
47.显然,本发明的上述实施例仅仅是为更清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化或变动,这里无法对所有的实施方法予以穷举,凡是属于本发明的技术方案所引申出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1