一种永磁同步电机转矩脉动抑制方法及相关系统与流程
1.本技术涉及车辆技术领域,尤其涉及一种永磁同步电机转矩脉动抑制方法及相关系统。
背景技术:
2.目前,新能源汽车的技术发展越来越迅速。驱动永磁同步电机作为新能源汽车的核心部件,其中,永磁同步电机具有高效率、高输出扭矩、高功率密度以及良好的动态性能等优点逐渐成为纯电动汽车驱动系统的首选。永磁同步电机的转矩脉动和电机相电流的谐波分量密切相关,因此可以控制电机相电流中特定次谐波分量,通过抑制特定次谐波电流消除转矩脉动或注入特定次谐波电流生成对抗转矩,实现转矩脉动的抑制或消除。现有的永磁同步电机谐波控制方法主要是多同步旋转坐标系控制方法。
3.然而,传统的多同步旋转坐标系控制方法需要大量的坐标变换,需要设计高性能的低通滤波器,系统在精确性和稳定性上存在矛盾。
技术实现要素:
4.本技术实施例提供一种永磁同步电机转矩脉动抑制方法及相关系统,能够通过简单的方式减小永磁同步电机的转矩脉动,可以避免使用高性能低通滤波器,以及避免引发系统在精确性和稳定性上的矛盾。
5.本技术实施例的第一方面,提供一种永磁同步电机转矩脉动抑制方法,包括:
6.获取永磁同步电机控制系统的电流环的交轴电流和直轴电流;
7.对所述交轴电流和所述直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量;
8.将所述交轴电流参考直流量和所述直轴电流参考直流量输入至所述电流环,以进行电流的闭环控制。
9.在一些实施方式中,所述对所述交轴电流和所述直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量,包括:
10.基于所述直轴电流,得到直轴电流直流量;
11.获取永磁同步电机的功率因素角,基于所述功率因素角、所述交轴电流和所述直轴电流,得到直轴参考电流;
12.基于所述直轴电流直流量和所述直轴参考电流,得到所述直轴电流参考直流量。
13.在一些实施方式中,所述获取永磁同步电机的功率因素角,基于所述功率因素角、所述交轴电流和所述直轴电流,得到直轴参考电流,包括:
14.获所述取永磁同步电机的所述功率因素角;
15.将所述交轴电流的平方与所述直轴电流的平方求和后开平方,将开平方得到的值乘以所述功率因素角的余弦值,得到直轴参考电流;
16.所述基于所述直轴电流直流量和所述直轴参考电流,得到所述直轴电流参考直流
量,包括:
17.将所述直轴参考电流和所述直轴电流直流量进行差值运算后,再与所述直轴电流直流量求和,得到所述直轴电流参考直流量。
18.在一些实施方式中,所述对所述交轴电流和所述直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量,包括:
19.基于所述交轴电流,得到交轴电流直流量;
20.基于所述交轴电流和所述交轴电流直流量,得到交轴谐波电流;
21.基于所述交轴谐波电流和所述直轴电流直流量,得到预测脉动转矩;
22.对所述预测脉动转矩进行等效谐波计算,得到参考谐波电流;
23.基于所述交轴谐波电流和所述参考谐波电流,得到所述交轴电流参考直流量。
24.在一些实施方式中,所述基于所述交轴电流和所述交轴电流直流量,得到交轴谐波电流,包括:
25.将所述交轴电流和所述交轴电流直流量进行差值运算,得到所述交轴谐波电流;
26.所述基于所述交轴谐波电流和所述参考谐波电流,得到所述交轴电流参考直流量,包括:
27.将所述交轴谐波电流和所述参考谐波电流进行差值运算,得到交轴等效谐波电流;
28.将所述交轴电流直流量和所述交轴等效谐波电流求和,得到所述交轴电流参考直流量。
29.本技术实施例的第二方面,提供一种永磁同步电机转矩脉动抑制系统,包括:
30.电流获取模块,用于获取永磁同步电机控制系统的电流环的交轴电流和直轴电流;
31.运算模块,用于对所述交轴电流和所述直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量;
32.电流输出模块,用于将所述交轴电流参考直流量和所述直轴电流参考直流量输入至所述电流环,以进行电流的闭环控制。
33.在一些实施方式中,所述运算模块包括:
34.直轴电流平均值模块,用于基于所述直轴电流,得到直轴电流直流量;
35.功率因素查找表模块,用于获取永磁同步电机的功率因素角;
36.直轴参考电流计算模块,用于将所述交轴电流的平方与所述直轴电流的平方求和后开平方,将开平方得到的值乘以所述功率因素角的余弦值,得到直轴参考电流。
37.在一些实施方式中,所述运算模块还包括:
38.交轴电流平均值模块,用于基于所述交轴电流,得到交轴电流直流量;
39.脉动转矩预测模块,用于基于所述直轴电流直流量,得到预测脉动转矩;
40.等效谐波电流计算模块,用于对所述预测脉动转矩进行等效谐波计算,得到参考谐波电流。
41.在一些实施方式中,所述运算模块还包括:
42.至少两个运算器,用于进行差值运算或求和运算。
43.本技术实施例的第三方面,提供一种永磁同步电机控制系统,包括:
44.如第二方面所述的永磁同步电机转矩脉动抑制系统。
45.本技术实施例提供的永磁同步电机转矩脉动抑制方法及相关系统,从电流环中获取交轴电流和直轴电流,将经过电流补偿运算的交轴电流参考直流量和直轴电流参考直流量输入至电流环,交轴电流参考直流量和直轴电流参考直流量可以在电流环内进行闭环控制,通过电流补偿的方式对永磁同步电机转矩脉动进行抑制,抑制精度高、稳定性好、方式简单,可以避免使用高性能低通滤波器,以及避免引发系统在精确性和稳定性上的矛盾。本技术实施例提供的永磁同步电机转矩脉动抑制方法,方法简单可靠、易于实现,无需对电机控制算法进行较大幅度的修改,可以针对不同的电机控制器进行复用。
附图说明
46.图1为本技术实施例提供的一种永磁同步电机转矩脉动抑制方法的示意性流程图;
47.图2为本技术实施例提供的一种永磁同步电机转矩脉动抑制系统的示意性结构框图;
48.图3为本技术实施例提供的一种运算模块的示意性结构框图;
49.图4为本技术实施例提供的一种永磁同步电机控制系统的示意性结构框图;
50.图5为本技术实施例提供的另一种永磁同步电机控制系统的示意性结构框图。
具体实施方式
51.为了更好的理解本说明书实施例提供的技术方案,下面通过附图以及具体实施例对本说明书实施例的技术方案做详细的说明,应当理解本说明书实施例以及实施例中的具体特征是对本说明书实施例技术方案的详细的说明,而不是对本说明书技术方案的限定,在不冲突的情况下,本说明书实施例以及实施例中的技术特征可以相互组合。
52.在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。术语“两个以上”包括两个或大于两个的情况。
53.目前,新能源汽车的技术发展越来越迅速。驱动永磁同步电机作为新能源汽车的核心部件,其中永磁同步永磁同步电机具有高效率、高输出扭矩、高功率密度以及良好的动态性能等优点逐渐成为纯电动汽车驱动系统的首选。永磁同步电机的转矩脉动和电机相电流的谐波分量密切相关,因此可以控制电机相电流中特定次谐波分量,通过抑制特定次谐波电流消除转矩脉动或注入特定次谐波电流生成对抗转矩,实现转矩脉动的抑制或消除。现有的永磁同步电机谐波控制方法主要包括多同步旋转坐标系控制和谐振控制。
54.然而,传统的同步旋转坐标系控制方法需要大量的坐标变换,同时需要设计高性能的低通滤波器,使系统在精确性和稳定性上存在矛盾,并且会导致较大的信号延迟,实时
性较差。而理想谐振控制器离散化数字实现后存在特性畸变,在电机高速运行时难以保证高频信号的稳定控制。
55.有鉴于此,本技术实施例提供一种永磁同步电机转矩脉动抑制方法及相关系统,能够通过简单的方式减小永磁同步电机的转矩脉动,可以避免使用高性能低通滤波器,以及避免引发系统在精确性和稳定性上的矛盾。
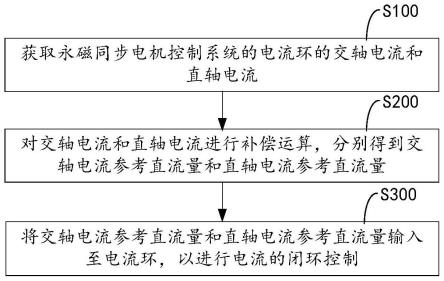
56.本技术实施例第一方面,提供一种永磁同步电机转矩脉动抑制方法,图1为本技术实施例提供的一种永磁同步电机转矩脉动抑制方法的示意性流程图。如图1所示,本技术实施例提供的永磁同步电机转矩脉动抑制方法,包括:
57.s100:获取永磁同步电机控制系统的电流环的交轴电流和直轴电流。交轴电流和直轴电流可以在电流环内进行坐标系变换、clark变换、park变换等。
58.s200:对交轴电流和直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量。补偿运算主要是电流补偿,可以主要是对电流的直流分量的补偿,可以对交轴电流和直轴电流进行单独的一系列的补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量。
59.s300:将交轴电流参考直流量和直轴电流参考直流量输入至电流环,以进行电流的闭环控制。将经过电流补偿运算的交轴电流参考直流量和直轴电流参考直流量输入至电流环,交轴电流参考直流量和直轴电流参考直流量可以在电流环内进行坐标系变换、clark变换、park变换等变换过程,能够实现对电流的闭环控制,通过电流补偿的方式对永磁同步电机转矩脉动进行抑制。无需设置高性能的低通滤波器,也无需进行大量的坐标变换,不会发生系统在精确性和稳定性上存在矛盾,不存在信号延迟的实时性差的问题。
60.本技术实施例提供的永磁同步电机转矩脉动抑制方法,从电流环中获取交轴电流和直轴电流,将经过电流补偿运算的交轴电流参考直流量和直轴电流参考直流量输入至电流环,交轴电流参考直流量和直轴电流参考直流量可以在电流环内进行闭环控制,通过电流补偿的方式对永磁同步电机转矩脉动进行抑制,抑制精度高、稳定性好、方式简单,可以避免使用高性能低通滤波器,以及避免引发系统在精确性和稳定性上的矛盾。本技术实施例提供的永磁同步电机转矩脉动抑制方法,方法简单可靠、易于实现,无需对电机控制算法进行较大幅度的修改,可以针对不同的电机控制器进行复用。
61.在一些实施方式中,步骤s200,可以包括:
62.基于直轴电流,得到直轴电流直流量。示例性的,通过永磁同步电机控制系统坐标变换获取电流环的直轴电流id,经过电流平均值模块获取与交直轴电流基波分量对应的直轴直流量id0。
63.获取永磁同步电机的功率因素角,基于功率因素角、交轴电流和直轴电流,得到直轴参考电流。可以基于相电压和相电流获取功率因素角,经过计算得到直轴参考电流。
64.示例性的,获取永磁同步电机的功率因素角,基于功率因素角、交轴电流和直轴电流,得到直轴参考电流,包括:
65.获取永磁同步电机的功率因素角。采集永磁同步电机相电压和相电流相位角差通过功率因素查表模块获取功率因素角。
66.将交轴电流的平方与直轴电流的平方求和后开平方,将开平方得到的值乘以功率因素角的余弦值,得到直轴参考电流。可以通过将功率因素角和相电流输入到直轴参考电
流计算模块获得对应的直轴参考电流id_ref。
67.示例性的,功率因素查表模块通过实际测试获取,通过相电压传感器和相电流传感器采集同一时刻的永磁同步电机的相电压和相电流,并且控制永磁同步电机运行在不同的工况下记录相电压、相电流、转速以及电机的扭矩等参数。通过获取同一时刻的相电压和相电流之间的相位差,即可获得当前时刻永磁同步电机的功率因素角。获取全转速段不同负载下的功率因素角直轴参考电流计算模块通过相电流传感器采集到的相电流和功率因素角,通过如下的公式获取直轴参考电流id_ref。
[0068][0069]
其中,iq为交轴电流。
[0070]
基于直轴电流直流量和直轴参考电流,得到直轴电流参考直流量。
[0071]
示例性的,基于直轴电流直流量和直轴参考电流,得到直轴电流参考直流量,包括:
[0072]
将直轴参考电流和直轴电流直流量进行差值运算后,再与直轴电流直流量求和,得到直轴电流参考直流量。将直轴参考电流id_ref和直轴电流直流量id0经过差值运算得到直轴电流补偿量id_com,直轴电流补偿量id_com与直轴电流直流量id0求和,得到直轴电流参考直流量id0_ref。
[0073]
在一些实施方式中,步骤s200,还可以包括:
[0074]
基于交轴电流,得到交轴电流直流量。通过永磁同步电机控制系统坐标变换获取电流环的交轴电流iq,经过电流平均值模块获取与交直轴电流基波分量对应的交轴直流量iq0。
[0075]
示例性的,电流平均值模块是利用电流结构特点,由平均值原理获取由平均值原理得到与基波分量对应的直流量。由于三相电流经过三相到两相变换后,次数将分别为6n和6n+6,n为任意大于0的自然数。对id、iq电流进行t/6(t为基波周期)的积分,得到的非零分量就是与基波分量对应的直流量,可得到交轴电流的基波分量iq0和直轴电流的基波分量id0。需要说明的是,id0和iq0可以同步获取得到,本技术实施例不作具体限定。
[0076]
基于交轴电流和交轴电流直流量,得到交轴谐波电流。
[0077]
基于交轴电流和交轴电流直流量,得到交轴谐波电流,可以包括:
[0078]
将交轴电流和交轴电流直流量进行差值运算,得到交轴谐波电流。示例性的,可以通过将初始的交轴电流iq与交轴电流直流量iq0进行差值运算获取交轴谐波电流iq6h。
[0079]
基于交轴谐波电流和直轴电流直流量,得到预测脉动转矩。
[0080]
示例性的,可以利用脉动转矩预测模块通过输入交轴谐波电流iq6h和直轴电流直流量id0获取预测脉动转矩te。
[0081]
对预测脉动转矩进行等效谐波计算,得到参考谐波电流。
[0082]
示例性的,通过采集一个转子角内的交轴谐波电流iq6h,并对交轴谐波电流iq6h进行平均值计算获取一个转子角内的谐波电流平均值,谐波电流平均值可以作为参考谐波电流iq6h_ref,并通过如下的公式获取预测脉动转矩te:
[0083][0084]
其中,δl=ld-lq,ld为直轴电感,lq为交轴电感,为直轴对应的磁链。
[0085]
具体的,通过上述预测脉动转矩te的求取等式和下述预测脉动转矩te的求取等式,可以得到交轴谐波电流对应的参考谐波电流iq6h_ref:
[0086][0087]
其中,np为永磁同步电机电极对数,为磁链。通过将两个等式进行合并处理,可以得到参考谐波电流iq6h_ref。
[0088]
基于交轴谐波电流和参考谐波电流,得到交轴电流参考直流量。
[0089]
基于交轴谐波电流和参考谐波电流,得到交轴电流参考直流量,包括:
[0090]
将交轴谐波电流和参考谐波电流进行差值运算,得到交轴等效谐波电流;
[0091]
将交轴电流直流量和交轴等效谐波电流求和,得到交轴电流参考直流量。
[0092]
具体的,交轴谐波电流iq6h与参考谐波电流iq6h_ref进行差值运算获取对应的交轴等效谐波电流δiq_ref,交轴等效谐波电流δiq_ref与交轴电流直流量iq0进行求和运算,得到交轴电流直流量iq0_ref。
[0093]
本技术实施例的第二方面,提供一种永磁同步电机转矩脉动抑制系统,图2为本技术实施例提供的一种永磁同步电机转矩脉动抑制系统的示意性结构框图。
[0094]
如图2所示,本技术实施例提供的永磁同步电机转矩脉动抑制系统,包括:
[0095]
电流获取模块400,用于获取永磁同步电机控制系统的电流环的交轴电流和直轴电流。
[0096]
运算模块500,用于对交轴电流和直轴电流进行补偿运算,分别得到交轴电流参考直流量和直轴电流参考直流量;
[0097]
电流输出模块600,用于将交轴电流参考直流量和直轴电流参考直流量输入至电流环,以进行电流的闭环控制。
[0098]
本技术实施例提供的永磁同步电机转矩脉动抑制系统,从电流环中获取交轴电流和直轴电流,将经过电流补偿运算的交轴电流参考直流量和直轴电流参考直流量输入至电流环,交轴电流参考直流量和直轴电流参考直流量可以在电流环内进行闭环控制,通过电流补偿的方式对永磁同步电机转矩脉动进行抑制,抑制精度高、稳定性好、方式简单,可以避免使用高性能低通滤波器,以及避免引发系统在精确性和稳定性上的矛盾。本技术实施例提供的永磁同步电机转矩脉动抑制方法,方法简单可靠、易于实现,无需对电机控制算法进行较大幅度的修改,可以针对不同的电机控制器进行复用。
[0099]
在一些实施方式中,图3为本技术实施例提供的一种运算模块的示意性结构框图。如图3所示,运算模块500包括:
[0100]
直轴电流平均值模块510,用于基于直轴电流,得到直轴电流直流量。通过直轴电流id经过直轴电流平均值模块510获取与交直轴电流基波分量对应的直轴直流量id0。
[0101]
功率因素查找表模块520,用于获取永磁同步电机的功率因素角。功率因素查找表模块520通过相电压传感器和相电流传感器采集同一时刻的永磁同步电机的相电压和相电流,并且控制永磁同步电机运行在不同的工况下记录相电压、相电流、转速以及电机的扭矩等参数。通过获取同一时刻的相电压和相电流之间的相位差,即可获得当前时刻永磁同步电机的功率因素角
[0102]
直轴参考电流计算模块530,用于将交轴电流的平方与直轴电流的平方求和后开平方,将开平方得到的值乘以功率因素角的余弦值,得到直轴参考电流。直轴参考电流计算
模块530通过相电流传感器采集到的相电流和功率因素角,通过如下的公式获取直轴参考电流id_ref。
[0103][0104]
可以利用运算器,将直轴参考电流和直轴电流直流量进行差值运算后,再与直轴电流直流量求和,得到直轴电流参考直流量。运算模块可以包括多个运算器,运算器可以用于进行差值运算或求和运算。参考图3,用于得到直轴电流参考直流量的运算器可以是第一运算器571和第二运算器572,第一运算器571将直轴参考电流id_ref和直轴电流直流量id0经过差值运算得到直轴电流补偿量id_com,第二运算器572将直轴电流补偿量id_com与直轴电流直流量id0求和,得到直轴电流参考直流量id0_ref。
[0105]
在一些实施方式中,参考图3,运算模块500还可以包括:
[0106]
交轴电流平均值模块540,用于基于所交轴电流,得到交轴电流直流量。交轴电流iq经过交轴电流平均值模块540获取与交直轴电流基波分量对应的交轴直流量iq0。
[0107]
运算器还可以包括第三运算器573,第三运算器573通过将初始的交轴电流iq与交轴电流直流量iq0进行差值运算获取交轴谐波电流iq6h。
[0108]
脉动转矩预测模块550,用于基于直轴电流直流量,得到预测脉动转矩。可以利用脉动转矩预测模块通过输入交轴谐波电流iq6h和直轴电流直流量id0获取预测脉动转矩te。
[0109]
等效谐波电流计算模块560,用于对所述预测脉动转矩进行等效谐波计算,得到参考谐波电流。示例性的,通过采集一个转子角内的交轴谐波电流iq6h,并对交轴谐波电流iq6h进行平均值计算获取一个转子角内的谐波电流平均值,谐波电流平均值可以作为参考谐波电流iq6h_ref,并通过如下的公式获取预测脉动转矩te:
[0110][0111]
其中,δl=ld-lq,ld为直轴电感,lq为交轴电感,为直轴对应的磁链。
[0112]
具体的,通过上述预测脉动转矩te的求取等式和下述预测脉动转矩te的求取等式,可以得到交轴谐波电流对应的参考谐波电流iq6h_ref:
[0113][0114]
其中,np为永磁同步电机电极对数,为磁链。通过将两个等式进行合并处理,可以得到参考谐波电流iq6h_ref。
[0115]
第四运算器574将交轴谐波电流iq6h与参考谐波电流iq6h_ref进行差值运算获取对应的交轴等效谐波电流δiq_ref,第五运算器575将交轴等效谐波电流δiq_ref与交轴电流直流量iq0进行求和运算,得到交轴电流直流量iq0_ref。
[0116]
本技术实施例的第三方面,提供一种永磁同步电机控制系统,图4为本技术实施例提供的一种永磁同步电机控制系统。如图4所示,本技术实施例提供的永磁同步电机控制系统的示意性结构框图,包括:
[0117]
如第二方面所述的永磁同步电机转矩脉动抑制系统1000。
[0118]
示例性的,图5为本技术实施例提供的另一种永磁同步电机控制系统的示意性结构框图。如图5所示,本技术实施例提供的永磁同步电机控制系统主要包括电流环pi调节器、转速环pi调节器,图5中电流环pi调节器、转速环pi调节器均用pi标识。永磁同步电机控
制系统还包括电流表查表模块isearch,park逆变换模块inv-park、svpwm模块svpwm、inverter逆变器模块inverter、clark变换模块clark、park变换模块park、永磁同步电机pmsm、编码器encoder和永磁同步电机转矩脉动抑制系统1000等。根据扭矩请求信号torque_ref和永磁同步电机转速信号motor_mechspeed,通过电流表查表模块isearch获取原始交轴电流iq_ref和原始直轴电流和id_ref,具体的,基于扭矩请求信号torque_ref和永磁同步电机转速信号motor_mechspeed,在电流表查表模块isearch中存储的二维表中查找得到原始交轴电流iq_ref和原始直轴电流和id_ref。永磁同步电机转矩脉动抑制系统通过输入的交轴电流iq和直轴电流id得到补偿后的交轴电流直流量iq0_ref和直轴电流直流量id0_ref。利用运算器可以基于原始交轴电流iq_ref和交轴电流直流量iq0_ref得到调节交轴电流iq*,利用运算器基于原始直轴电流和id_ref和直轴电流直流量id0_ref得到调节直轴电流id*。电流环pi调节器和转速环pi调节器则分别将调节交轴电流iq*和调节直轴电流id*转换成交轴电压uq和直轴电压ud,交轴电压uq和直轴电压ud是旋转坐标系下的电压;交轴电压uq和直轴电压ud再经过park逆变换模块inv-park转换成静止坐标系下的uβ和uα,最终经过svpwm模块svpwm转换成控制inverter逆变器模块inverter的开关信号,用于控制inverter逆变器inverter输出交变的三相电流(ia、ib和ic),进而控制永磁同步电机pmsm。clark变换模块clark将三相电流转换成iα和iβ,并通过park变换模块park转换成id和iq从而实现电流的闭环控制。
[0119]
本技术实施例提供的永磁同步电机控制系统,主要解决现有技术中由于需要大量的坐标变换,增加电机控制器过大的运算量,同时由于采用了交直轴电流平均值获取交直轴基波分量避免设计高性能的低通滤波器,使系统在精确性和稳定性上存在矛盾,同时还可以解决由于采用低通滤波器导致的较大信号延迟、信号实时性较差的问题。另外,本技术实施例简单可靠、易于实现,无需对电机控制算法进行较大幅度的修改,可以针对不同的电机控制器进行复用。
[0120]
尽管已描述了本说明书的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本说明书范围的所有变更和修改。
[0121]
显然,本领域的技术人员可以对本说明书进行各种改动和变型而不脱离本说明书的精神和范围。这样,倘若本说明书的这些修改和变型属于本说明书权利要求及其等同技术的范围之内,则本说明书也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1