一种移动式配网带电作业机器人的制作方法
1.本发明涉及一种移动式配网带电作业机器人,属于配电网接引流线技术领域。
背景技术:
2.配网带电作业已成为供电企业减少停电时间、提升供电可靠性和服务水平的最直接、最有效手段,主要开展的作业项目为10kv带电断接引、紧固螺栓、修剪树枝、安装接地环、更换避雷器等。但人工作业劳动强度大、安全风险高,采用机器人替代人工高危作业有非常迫切的需求。目前国内外普遍采用配网带电作业机器人来操作。然而,目前的配网带电作业机器人均搭载于绝缘斗臂车上,体积较大、重量较重,难以适用于没有道路的作业地形、狭小作业空间及复杂作业对象,尤其不便于在三角形排列或水平排列线路的中相开展作业,极大地限制了配网带电作业机器人的应用范围。针对该问题,申请人曾研发了一种便携式配电网带电接引流线机器人来作业(申请号2021114865717),然而在实际应用时,申请人发现其仅能实现定点作业,无法根据需要调节其位置,有必要对此进行改进。
技术实现要素:
3.基于上述,本发明提供一种移动式配网带电作业机器人,能够实现机器人在配网线路上的移动调节,以克服现有技术的不足。
4.本发明的技术方案是:一种移动式配网带电作业机器人,包括:机器人本体;吊行组件,包括:一起吊机构,包括卷扬机、卷绳和挂钩,所述卷扬机设置于所述机器人本体上,所述卷绳一端与所述卷扬机相连,另一端与所述挂钩相连;一走行机构,包括转动环、转环驱动机构、两行走立柱、行走轮、轮子调节机构和压紧轮,所述转动环可转动设置于所述机器人本体的顶部,所述转环驱动机构可驱动所述转动环转动,所述两行走立柱对称设置于所述转动环上,所述行走轮可转动设置于所述行走立柱的顶部,所述轮子调节机构安装于所述行走立柱上,所述压紧轮设置于所述轮子调节机构上,所述轮子调节机构可驱动所述压紧轮沿高度方向上下移动,所述行走轮为带电机的轮子。
5.在其中一个例子中,所述轮子调节机构包括调节丝杠、调节驱动电机和调节滑块,所述调节丝杠可转动设置于所述行走立柱上,所述调节滑块套设于所述调节丝杠上,所述压紧轮安装于所述调节滑块上。
6.在其中一个例子中,所述行走轮为一个,所述压紧轮为两个,且两个所述压紧轮分别位于所述行走轮下方的两侧。
7.在其中一个例子中,所述机器人还包括:转动组件,包括转动台、转动横担和转动驱动机构,所述转动台可转动设置于所述机器人本体的底部,所述转动横担固定于所述转动台上,所述转动驱动机构可驱动所述转
动台的转动;剥皮组件,包括剥皮升降机构、进线旋转机构、导线夹紧机构和皮层环切机构,所述剥皮升降机构设置于所述转动横担的一端,所述进线旋转机构设置于所述剥皮升降机构上,所述导线夹紧机构设置于所述进线旋转机构上,所述皮层环切机构设置于所述导线夹紧机构上;挂夹组件,包括承载底板、三轴移动机构、固夹机构和拧夹机构,所述承载底板设置于所述转动横担的另一端,所述三轴移动机构设置于所述承载底板上,所述固夹机构设置于所述三轴移动机构上,所述拧夹机构设置于所述承载底板上,并位于所述固夹机构的下方,用于拧动螺母以将所述固夹机构上的引流线夹固定在配网线路上。
8.在其中一个例子中,所述进线旋转机构包括旋转支座、旋转齿轮和旋转驱动机构,所述旋转支座设置于所述剥皮升降机构上,所述旋转支座上设有可供导线通过的开口通道,所述旋转齿轮可转动安装于所述开口通道内,所述旋转齿轮由主旋转齿和过桥齿连接而成,所述旋转驱动机构可驱动所述旋转齿轮的转动。
9.在其中一个例子中,所述进线旋转机构还包括回转环,固设于所述旋转齿轮的两端面,并且所述回转环的半径小于所述旋转齿轮的半径,所述旋转支座上设有用于安装所述回转环的回转凸条。
10.在其中一个例子中,所述导线夹紧机构包括夹紧支座、夹紧驱动机构、正反丝杆、导向轴、第一夹块和第二夹块,所述夹紧支座固设于所述旋转齿轮的端部,所述正反丝杆和所述导向轴同向设置于所述夹紧支座上,所述第一夹块和所述第二夹块分别可安装于所述正反丝杆的两侧,并且可活动穿设置于所述导向轴上,所述夹紧驱动机构可驱动所述正反丝杆的转动,从而使得所述第一夹块和所述第二夹块相互靠拢或远离。
11.在其中一个例子中,所述皮层环切机构包括环切支座、环切驱动机构和切刀,所述环切支座设置于所述第一夹块或所述第二夹块上,所述切刀设置于所述环切支座上,所述环切驱动机构可驱动所述切刀的径向进给。
12.在其中一个例子中,所述固夹机构包括固夹支架、两固夹夹爪和固夹驱动机构,所述固夹支架固设于所述三轴移动机构上,所述两固夹夹爪设置于所述固夹支架上,所述固夹驱动机构可驱动所述两固夹夹爪在松开状态和夹持状态之间活动。
13.在其中一个例子中,所述拧夹机构包括拧夹升降机构、拧夹支座、拧夹套筒和拧夹驱动机构,所述拧夹升降机构设置于所述承载底板上,所述拧夹支座设置于所述拧夹升降机构上,所述拧夹套筒可转动设置于所述拧夹支座上,所述拧夹驱动机构可驱动所述拧夹套筒的转动。
14.本发明的有益效果是:采用本发明后,作业时,作业人员将卷绳与挂钩下端栓结连接,使用操作杆将挂钩举起,并挂载于待作业位置,同时将垂下的卷绳连接于机箱内的卷扬机上。启动卷扬机,通过多机位摄像头判断配网线(导线)具体位置,待机器人本体上升至接近配网线位置时,通过转环驱动机构驱动转动环转动,使左右的行走轮水平转动一定角度,避开配网线,继续提升一定高度,待左右行走轮的轮缘部分超出配网线时,逆向转动转动环,使左右行走轮转动至配网线上方,略微下放机器人本体,使行走轮挂载于配网线上,同时,可通过轮子调节机构带动压紧轮向上移动,直至压紧轮顶紧配网线,此时行走轮的底部与配网线紧密接触,行
走轮转动即可前后移动调节,满足作业位置需求。
15.此外,本发明参考传统人工带电接引流线作业流程,提出一种移动式配网带电作业机器人及其作业方法,充分发挥机器人在保障作业安全、减轻劳动强度、提升工作效率等方面的技术优势,助力配网运检装备智能化升级,推动配网智能运检水平的提升,提高供电可靠性、满足民生电力需求。
16.本发明集上下线与带电作业功能于一体,操作简单,适用于不同电压等级的绝缘配电线路,代替作业人员完成接引流线工作,可以不需要检修人员上塔完成带电接引流线,提高了供电的可靠性,减轻劳动强度和危险性,在确保了作业人员安全的同时也极大地提高了配网运维检修的效率。
附图说明
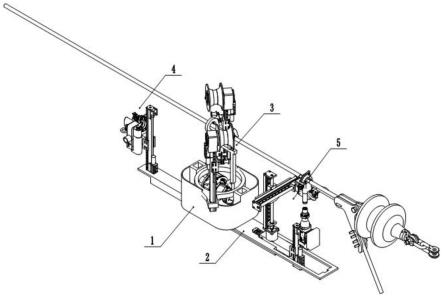
17.图1为移动式配网带电作业机器人一视角下的示意图;图2为移动式配网带电作业机器人另一视角下的示意图;图3为吊行组件的示意图;图4为起吊机构的示意图;图5为走行机构一视角下的示意图;图6为走行机构另一视角下的示意图;图7为剥皮组件一视角下的示意图;图8为剥皮升降机构的示意图;图9为剥皮组件(除去剥皮升降机构)的示意图;图10为进线旋转机构(除去旋转支座的壳体)的示意图;图11为旋转支座的示意图;图12为导线夹紧机构与皮层环切机构的示意图;图13为导线夹紧机构与皮层环切机构的俯意图;图14为挂夹组件一视角下的示意图;图15为挂夹组件另一视角下的示意图;图16为固夹机构的示意图;图17为拧夹机构一视角下的示意图;图18为拧夹机构另一视角下的示意图;图19为拧夹升降机构的示意图;附图标记说明:1机器人本体;2转动组件;21转动台,22转动横担;3吊行组件;31起吊机构;311卷扬机,312卷绳,313挂钩;32走行机构;321转动环,322行走立柱,323行走轮,324轮子调节机构,325压紧轮;
3241调节丝杠,3242调节驱动电机,3243调节滑块;4剥皮组件;41剥皮升降机构;411剥皮支座,412剥皮丝杠,413剥皮螺母,414剥皮导轨,415剥皮滑块,416剥皮驱动电机;42进线旋转机构;421旋转支座,422旋转齿轮,423旋转驱动机构,424主动齿轮,425回转环;4211回转凸条;4221主旋转齿,4222过桥齿;43导线夹紧机构;431夹紧支座,432夹紧驱动机构,433正反丝杆,434导向轴,435第一夹块,436第二夹块,437夹持凸条;44皮层环切机构441环切支座,442环切驱动机构,443切刀;5挂夹组件;51承载底板;52三轴移动机构;521 x轴位移平台,522 z轴位移平台,523 y轴位移平台;53固夹机构;531固夹支架,532固夹夹爪,533固夹丝杠,534固夹驱动电机,535固夹滑块,536固夹连杆;54拧夹机构;541拧夹升降机构,542拧夹支座,543拧夹套筒,544拧夹驱动机构;5411升降导轨,5412升降丝杠,5413升降驱动电机,5414升降滑块。
具体实施方式
18.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
19.请参阅图1至图19,本实施方式一种移动式配网带电作业机器人,包括机器人本体1、转动组件2、吊行组件3、剥皮组件4和挂夹组件5。
20.机器人本体1,起支撑作用,主要用于支撑安装转动组件2、吊行组件3、剥皮组件4和挂夹组件5等零部件。本实施例中,机器人本体1呈上端开口的箱体结构。
21.转动组件2,主要用于安装剥皮组件4和挂夹组件5,并实现二者的转动换位。转动组件2包括转动台21、转动横担22和转动驱动机构,转动台21可转动安装在机器人本体1的底部,转动横担22固定在转动台21上,转动驱动机构可驱动转动台21的转动,从而实现剥皮组件4和挂夹组件5的转动换位。本实施例中,转动横担22的两端对称延伸出转动台21一定距离,转动驱动机构可以为旋转驱动电机。
22.吊行组件3,主要用于将机器人本体1、剥皮组件4和挂夹组件5向上迁移,并可沿配网线路走行移动。吊行组件包括起吊机构31和走行机构32,起吊机构31包括卷扬机311、卷绳312和挂钩313,卷扬机311安装在机器人本体1上,卷绳312一端与卷扬机311相连,另一端与挂钩313相连。走行机构32包括转动环321、转环驱动机构、两行走立柱322、行走轮323、轮子调节机构324和压紧轮325,转动环321可转动安装在机器人本体1的顶部,卷绳312和挂钩313位于环内,转环驱动机构可驱动转动环321转动,两行走立柱322对称安装在转动环321上,行走轮323可转动安装在行走立柱322的顶部,轮子调节机构324安装在行走立柱322上,压紧轮325安装在轮子调节机构324上,轮子调节机构324可驱动压紧轮325沿高度方向上下移动,实现对其高度位置的调节,行走轮323为带电机的轮子,蓄电池可以安装在机器人本体1内。作业时,作业人员将卷绳312与挂钩313下端栓结连接,使用操作杆将挂钩举起,并挂载于待作业位置,同时将垂下的卷绳312连接于机箱内的卷扬机311上。启动卷扬机311,通过多机位摄像头判断配网线(导线)具体位置,待机器人本体1上升至接近配网线位置时,通过转环驱动机构驱动转动环321转动,使左右的行走轮323水平转动一定角度,避开配网线,继续提升一定高度,待左右行走轮323的轮缘部分超出配网线时,逆向转动转动环321,使左右行走轮323转动至配网线上方,略微下放机器人本体1,使行走轮323挂载于配网线上,同时,通过轮子调节机构324带动压紧轮325向上移动,直至压紧轮325顶紧配网线,此时行走轮323的底部与配网线紧密接触,行走轮323转动即可前后移动。
23.本实施例中,卷扬机311为两个,对称安装在机器人本体1上,两个卷扬机311对应的两根卷绳312均与挂钩313相连,吊线机构32为两组,对称安装在机器人本体1的两相对侧,从而保证机器人本体1上下线的稳定性。本实施例中,卷扬机311内设有伺服电机,伺服电机驱动卷扬机311内的蜗轮并带动蜗杆使得卷扬机311旋转,进行卷绳312与放绳,实现机器人本体1的上升与下降。
24.本实施例中,轮子调节机构324包括调节丝杠3241、调节驱动电机3242和调节滑块3243,调节丝杠3241可转动安装在行走立柱322上,调节滑块3243套设在调节丝杠3241上,压紧轮325安装在调节滑块3243上。随着调节驱动电机3242带动调节丝杠3241的转动,调节滑块3243可带动压紧轮325上下移动。
25.本实施例中,行走轮323为一个,压紧轮325为两个,且两个压紧轮325分别位于行走轮323下方的两侧。具体而言,每个行走立柱322上安装有一个行走轮323,两个压紧轮325,优选的,压紧轮325的轮径小于行走轮323的轮径,压紧轮325的轮经刚好能够包裹配网线的下部,该种结构能够更好的调节压紧轮325与行走轮323之间的距离,保证与配网线的可靠紧密接触。
26.本实施例中,在机器人本体1上还安装有陀螺仪,通过分析计算陀螺仪输出数据,进行两组卷扬机311速度补偿控制,从而实现机器人的平稳升降。
27.本实施例中,卷绳312可以为绝缘绳,以保证带电作业时的安全性。
28.剥皮组件4,主要用于实现对配网线路的剥皮(剥去绝缘层)。剥皮组件4包括剥皮升降机构41、进线旋转机构42、导线夹紧机构43和皮层环切机构44,剥皮升降机构41安装在转动横担22的一端,进线旋转机构42安装在剥皮升降机构41上,导线夹紧机构43安装在进线旋转机构42上,皮层环切机构44安装在导线夹紧机构43上。工作状态下,由剥皮升降机构41驱动进线旋转机构42上移至配网线路上待接线位置处,然后由导线夹紧机构43夹持住配
网线路,再由进线旋转机构42驱动导向夹紧机构旋转,并由皮层环切机构44对配网线路进行剥皮,完成后导线夹紧机构43松开配网线路,由剥皮升降机构41驱动驱动进线旋转机构42下移至配网线路下方。
29.本实施例中,剥皮升降机构41包括剥皮支座411、剥皮丝杠412、剥皮螺母413、剥皮导轨414、剥皮滑块415和剥皮驱动电机416,剥皮支座411安装在转动横担22的一端上部,剥皮丝杠412可转动安装在剥皮支座411上,剥皮螺母413套接在剥皮丝杠412上,剥皮导轨414竖向安装在剥皮支座411上,剥皮滑块415可移动安装在剥皮导轨414上,并与剥皮螺母413连接,随着剥皮驱动电机416驱动剥皮丝杠412的转动,带动剥皮滑块415沿剥皮导轨414上下移动。
30.本实施例中,进线旋转机构42包括旋转支座421、旋转齿轮422和旋转驱动机构423,旋转支座421安装在剥皮滑块415上,旋转支座421上设有可供导线通过的开口通道,旋转齿轮422可转动安装在开口通道内,旋转齿轮422由主旋转齿4221和过桥齿4222连接而成,旋转驱动机构423可驱动旋转齿轮422的转动。工作状态下,旋转支座421跟随剥皮升降机构41上下移动,旋转驱动机构423可驱动旋转齿轮422轴开口通道内旋转。旋转驱动机构423可以为旋转驱动电机,旋转驱动电机的输出轴与主动齿轮424连接,主动齿轮424与旋转齿轮422啮合,通过旋转驱动电机的转动,带动旋转齿轮422轴开口通道内转动。在将进线旋转机构42向上移动至配网线路待接线处时,先将过桥齿4222打开,即可通过剥皮升降机构41将开口通道向上推入到待接线上,并且使得配网线路处于旋转齿轮422的正中心。
31.本实施例中,进线旋转机构42还包括回转环425,回转环425固定安装在旋转齿轮422的两端面,并且回转环425的半径小于旋转齿轮422的半径,旋转支座421上设有用于安装回转环425的回转凸条4211,从而限制旋转齿轮422从开口通道内脱离出来。工作状态下,回转环425可跟随旋转齿轮422同步转动,并带动导线夹紧机构43转动。
32.本实施例中,导线夹紧机构43包括夹紧支座431、夹紧驱动机构432、正反丝杆433、导向轴434、第一夹块435和第二夹块436,夹紧支座431固定安装在回转环425的端部,正反丝杆433和两根导向轴434同向安装在夹紧支座431上,第一夹块435和第二夹块436分别可安装于正反丝杆433的两侧,并且可活动穿设于导向轴434上,夹紧驱动机构432可驱动正反丝杆433的转动,从而使得第一夹块435和第二夹块436相互靠拢或远离。夹紧驱动机构432可以为夹紧驱动电机。正反丝杠和两根导向轴434为水平设置,并且垂直于开口通道的轴向。工作状态下,当配网线路待接线位置处套接在旋转齿轮422的正中心后,由夹紧驱动电机转动带动正反丝杆433转动,进而带动第一夹块435和第二夹块436相互靠拢压紧在配网线路上,再由旋转驱动电机转动带动旋转齿轮422转动,使得过桥齿4222在旋转时自动闭合,完成导向的放入与压紧作业。
33.本实施例中,皮层环切机构44包括环切支座441、环切驱动机构442和切刀43,环切支座441安装在第一夹块435或第二夹块436上,切刀43安装在环切支座441上,环切驱动机构442可驱动切刀43的径向进给。环切驱动机构442可以为环切电动推杆。切刀43悬于导线外圆上方,环切支座441可跟随第一夹块435或第二夹块436同步移动和转动。工作状态下,第一夹块435和第二夹块436压紧在导线外并旋转时,其会带动切刀43作同步转动,逐渐环切绝缘层直至裸导线露出,即可实现对导线的绝缘层的剥皮处理。
34.本实施例中,第一夹块435和第二夹块436的相对内侧面呈弧形凹槽,并且弧形凹
槽内间隔设于若干夹持凸条437,以方便稳固夹持住导线上,进而提高剥皮效果。
35.本实施例中,在第一夹块435上设有u型开口,环切支座441安装在u型开口内,切刀43安装在u型开口上部位置,对应的第二夹块436上设有缺口,以便切刀43能够径向进给。本实施例中,在切刀43的末端设有金属传感器,以避免误切绝缘导线内部的金属导线。
36.挂夹组件5,主要用于安装固定引流线夹。挂夹组件5包括承载底板51、三轴移动机构52、固夹机构53和拧夹机构54,承载底板51安装在转动横担22的另一端,三轴移动机构52安装在承载底板51上,固夹机构53安装在三轴移动机构52上,拧夹机构54安装在承载底板51上,并位于固夹机构53的下方,用于拧动螺母以将固夹机构53上的引流线夹固定在配网线路上。工作状态下,当剥皮组件4将配电网接线处的绝缘层剥皮后,转动驱动机构可驱动转动台21的转动180
°
,从而实现剥皮组件4和挂夹组件5的转动换位,此时由三轴移动机构52移动固夹机构53,使得固夹机构53上夹持的引流线夹套设于配电网线路上,再通过控制拧夹机构54将引流线夹上的螺母拧紧,即可实现引流线夹在配电网线路上的安装固定。
37.本实施例中,固夹机构53包括固夹支架531、两固夹夹爪532和固夹驱动机构,固夹支架531安装在三轴移动机构52上,两固夹夹爪532可活动安装在固夹支架531上,固夹驱动机构可驱动两固夹夹爪532在松开状态和夹持状态之间活动。在夹持状态下,两固夹夹爪532可夹持住引流线夹。
38.本实施例中,固夹驱动机构还包括固夹丝杠533、固夹驱动电机534、固夹滑块535和两固夹连杆536,固夹丝杠533可转动安装在固夹支架531上,固夹驱动电机534安装在固夹支架531上,固夹滑块535套设在固夹丝杠533上,两固夹连杆536的一端铰接于固夹滑块535上,两固夹连杆536的另一端与固夹夹爪532的一端铰接,两固夹夹爪532的中部铰接于固夹支架531上,随着固夹驱动电机534带动固夹丝杠533的转动,固夹滑块535会沿着固夹丝杠533上下移动,从而可推动固夹连杆536带动两固夹夹爪532动作。
39.本实施例中,在其中一个固夹夹爪532的上部设有条形开口,另一个固夹夹爪532的顶端在夹持状态下可伸入到条形开口内,以保证固夹夹爪532在夹持状态下的稳定性。
40.本实施例中,拧夹机构54包括拧夹升降机构541、拧夹支座542、拧夹套筒543和拧夹驱动机构544,拧夹升降机构541安装在承载底板51上,拧夹支座542安装在拧夹升降机构541上,拧夹套筒543可转动安装在拧夹支座542上,拧夹驱动机构544可驱动拧夹套筒543的转动。工作状态下,可由拧夹升降机构541驱动拧夹支座542上下移动,从而带动拧夹套筒543的上下移动,并且可通过拧夹驱动机构544带动拧夹套筒543的转动,从而实现对引流线夹上螺母的拧动。拧夹驱动机构544可以为拧夹驱动电机。
41.本实施例中,拧夹升降机构541包括升降导轨5411、升降丝杠5412、升降驱动电机5413和升降滑块5414,升降导轨5411安装在承载底板51上,升降丝杠5412可转动安装在升降导轨5411上,升降驱动电机5413安装在升降导轨5411上,并可驱动升降丝杠5412的转动,升降滑块5414套设在升降丝杠5412上,拧夹支座542安装在升降滑块5414上,随着升降驱动电机5413带动升降丝杠5412的转动,升降滑块5414同步带动拧夹支座542上下移动,从而实现拧夹套筒543的升降移动。
42.本实施例中,三轴移动机构52包括x轴位移平台521、z轴位移平台522和y轴位移平台523,x轴位移平台521安装在承载底板51上,z轴位移平台522安装在x轴位移平台521上,y轴位移平台523安装在z轴位移平台522上,固夹支架531安装在y轴位移平台523上,通过三
轴移动机构52可调节固夹支架531在三维空间内的位置。x轴位移平台521、z轴位移平台522和y轴位移平台523均采用丝杠滑移结构,包括轴底座、轴丝杠、轴导轨、轴滑块和轴电机,轴丝杠和和轴导轨安装在两轴底座之间,轴滑块套设于轴丝杠和轴导轨上,轴电机可驱动轴丝杠的转动,从而带动轴滑块的移动。
43.本发明实施方式一种移动式配网带电作业机器人的作业方法,包括以下步骤:(1)作业时,作业人员将卷绳312与挂钩313下端栓结连接,使用操作杆将挂钩313举起,并挂载于待作业位置,同时将垂下的卷绳312连接于机箱内的卷扬机311上。启动卷扬机311,通过多机位摄像头判断配网线(导线)具体位置,待机器人本体1上升至接近配网线位置时,通过转环驱动机构驱动转动环321转动,使左右的行走轮323水平转动一定角度,避开配网线,继续提升一定高度,待左右行走轮323的轮缘部分超出配网线时,逆向转动转动环321,使左右行走轮323转动至配网线上方,略微下放机器人本体1,使行走轮323挂载于配网线上,同时,通过轮子调节机构324带动压紧轮325向上移动,直至压紧轮325顶紧配网线,此时行走轮323的底部与配网线紧密接触,行走轮323转动即可前后移动。
44.(2)由转动驱动机构驱动转动台21转动,使得剥皮组件4位于配网线路待接线位置下方,当其位置不在正下方时,可通过行走轮323移动调节。
45.(3)由剥皮升降机构41驱动进线旋转机构42上移至配网线路上待接线位置处,然后由导线夹紧机构43夹持住配网线路,再由进线旋转机构42驱动导向夹紧机构旋转,由皮层环切机构44对配网线路进行剥皮,完成后导线夹紧机构43松开配网线路,由剥皮升降机构41驱动驱动进线旋转机构42下移至配网线路下方。本实施例中,在将进线旋转机构42向上移动至配网线路待接线处时,先将过桥齿4222打开,即可通过剥皮升降机构41将开口通道向上推入到待接线上,并且使得配网线路处于旋转齿轮422的正中心,然后由夹紧驱动电机转动带动正反丝杆433转动,进而带动第一夹块435和第二夹块436相互靠拢压紧在配网线路上,再由旋转驱动电机转动带动旋转齿轮422转动,使得过桥齿4222在旋转时自动闭合,完成导向的放入与压紧作业,同时转动过程中切刀43逐渐环切配电网线路待接线位置处的绝缘层直至裸导线露出,完成后第一夹块435和第二夹块436松开,旋转驱动电机驱动旋转齿轮422转动至初始位置,再由剥皮升降机构41驱动进线旋转机构42下移脱离配电网线路即可。
46.(4)由转动驱动机构驱动转动台21转动,使得挂夹组件5位于配网线路待接线位置下方。本实施例中,转动驱动机构驱动转动台21转动180
°
,实现挂夹组件5与剥皮组件4位置的互换。
47.(5)由三轴移动机构52移动固夹机构53并将引流线夹套在配网线路待接线位置处,然后由拧夹机构54上移并拧动引流线夹上的螺母,使得引流线夹固定在配网线路上,完成后固定线夹松开引流线夹。本实施例中,通过三轴移动机构52调节固夹支架531在三维空间内的位置,使得固夹支架531上夹持的引流线夹从横向套设在配电网线路上,前述剥皮位置处,再通过拧夹升降机构541驱动拧夹支座542向上移动至拧夹套筒543套于引流线夹的螺母上,然后通过拧夹驱动机构544带动拧夹套筒543的转动,从而实现对引流线夹上螺母的拧动,以实现引流线夹的固定安装,完成后,拧夹升降机构541驱动拧夹套筒543下移至初始位置,固夹机构53松开引流线夹。
48.(6)通过轮子调节机构324带动压紧轮325向下移动一段距离,然后启动卷扬机311
使得机器人本体1向上移动一小段距离,再通过转环驱动机构驱动转动环321转动,使得左右的行走轮323水平转动一定角度,避开配网线,继续向下移动至地面上,最后将挂钩313取下即可。
49.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1