一种闭环步进电机动态解耦的控制方法、系统及存储介质与流程
1.本发明涉及电机控制技术领域,具体涉及一种闭环步进电机动态解耦的控制方法、系统及存储介质。
背景技术:
2.传统步进电机一般仅采用开环控制,为了提高步进电机的输出转矩和转速,在开环步进电机的基础上增加了速度和位置检测形成闭环控制。闭环步进电机电流闭环中利用坐标变换将电流分解为励磁电流分量(d轴电流)和转矩电流分量(q轴电流)分别加以控制,实现了步进电机电流励磁电流分量与转矩电流分量的解耦,但是这种方法只实现了两种电流分量的静态解耦,两者之间仍存在动态耦合关系。特别是在非常高的加减速过渡过程中,速度、位置对电流的耦合影响加剧,使转矩产生瞬时畸变,影响其动态性能。
技术实现要素:
3.为了解决磁励电流分量和转矩电流分量之间存在动态耦合的技术问题,本发明提供了一种闭环步进电机动态解耦的控制方法以实现磁励电流分量和转矩电流分量之间的动态解耦,另外还提供了一种闭环步进电机的控制系统及存储介质,其具体技术方案如下。
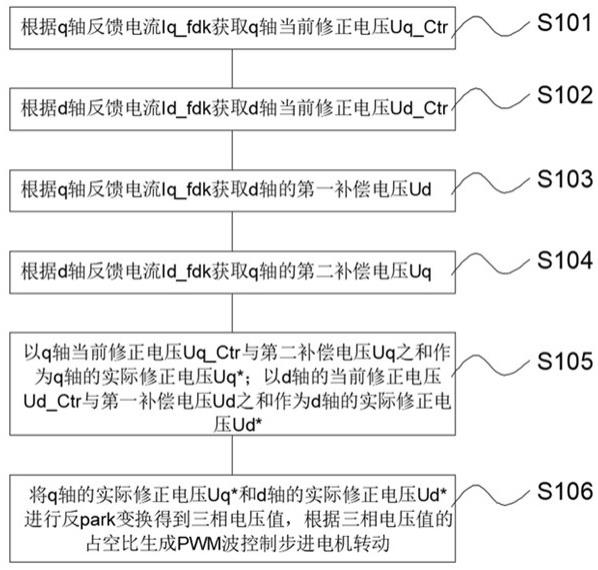
4.一种闭环步进电机动态解耦的控制方法,包括如下步骤:根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr;根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr;根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud;根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq;以q轴当前修正电压uq_ctr与第二补偿电压uq之和作为q轴的实际修正电压uq*;以d轴的当前修正电压ud_ctr与第一补偿电压ud之和作为d轴的实际修正电压ud*;将q轴的实际修正电压uq*和d轴的实际修正电压ud*进行反park变换得到电压值,根据电压值的占空比生成pwm波控制步进电机转动。
5.进一步的,所述根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud包括:获取步进电机的固定常数p;获取速度环中编码器检测的速度反馈值spd_fdk;获取步进电机的电感值l;将步进电机两项正交电流进行park变换后得到q轴反馈电流iq_fdk;计算第一补偿电压ud,ud=-p*spd_fbk*l*iq_fdk。
6.进一步的,所述根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq包括:获取步进电机的固定常数p;获取速度环中编码器检测的速度反馈值spd_fdk;获取步进电机的电感值l;将步进电机两项正交电流进行park变换后得到d轴反馈电流id_fdk;
获取磁链ψf;计算第二补偿电压uq,uq= p*spd_fdk*l*id_fdk + p*spd_fdk*ψf。
7.进一步的,所述根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr包括:获取位置环中的给定位置pos_ref、编码器检测的反馈位置pos_fdk;将给定位置pos_ref与反馈位置pos_fdk作差后经过位置环比例控制器得到位置环控制量pos_ctr;获取速度环中的给定速度spd_ref、编码器检测的反馈速度spd_fdk;将给定速度spd_ref乘以系数k1再加上位置环控制量pos_ctr后,与反馈速度spd_fdk做差再经过速度环比例积分控制器得到速度环控制量spd_ctr;将速度环中的给定速度spd_ref与编码器检测的反馈速度spd_fdk作差后乘以系数k2,再与速度环控制量spd_ctr相加得到q轴给定电流iq_ref;将q轴给定电流iq_ref与q轴反馈电流作差后经过电流环比例积分控制器得到q轴当前修正电压uq_ctr。
8.进一步的,所述根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr包括:获取d轴给定电流id_ref;将d轴给定电流id_ref与d轴反馈电流id_fdk作差后经过电流环比例积分控制器得到d轴当前修正电压ud_ctr。
9.进一步的,park变换与反park变化的电角度θ_ctr的获取过程包括:获取编码器检测的反馈位置电角度θ;计算电角度θ_ctr,θ_ctr=θ+spd_fdk*k3+φ,k3为系数,φ为角度补偿值。
10.一种闭环步进电机的控制系统,包括:q轴修正电压获取模块,被配置为根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr;d轴修正电压获取模块,被配置为根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr;d轴补偿电压获取模块,被配置为根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud;q轴补偿电压获取模块,被配置为根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq;补偿模块,被配置为以q轴当前修正电压uq_ctr与第二补偿电压uq之和作为q轴的实际修正电压uq*;以d轴的当前修正电压ud_ctr与第一补偿电压ud之和作为d轴的实际修正电压ud*;控制模块,被配置为将q轴的实际修正电压uq*和d轴的实际修正电压ud*进行反park变换得到电压值,根据电压值的占空比生成pwm波控制步进电机转动。
11.一种存储介质,所述存储介质上存储有计算机程序指令,所述计算机程序指令被计算机读取并运行时,执行上述任一项所述的闭环步进电机的控制方法的步骤。
12.有益效果:本发明所提供的一种闭环步进电机动态解耦的控制方法,根据q轴反馈电流计算获取适当的d轴的第一补偿电压ud,根据d轴反馈电流计算获取适当的q轴的第二补偿电压uq,分别利用第一补偿电压和第二补偿电压对d轴电压和q轴电压进行动态补偿,实现励磁电流分量与转矩电流分量的动态解耦,提高步进电机的动态性能,增大步进电机高速时的转矩和平稳性。
附图说明
13.图1为本发明控制方法的流程框图;图2为本发明步进电机动态解耦的示意图;图3为本发明控制系统的示意图。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获取的所有其他实施例,都属于本发明保护的范围。
15.实施例1本实施例提供了一种闭环步进电机动态解耦的控制方法,分别对q轴和d轴的电压进行适当的补偿,实现电流环控制过程中的动态解耦,其具体包括如下步骤:s101、根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr;s102、根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr;s103、根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud;s104、根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq;s105、以q轴当前修正电压uq_ctr与第二补偿电压uq之和作为q轴的实际修正电压uq*;以d轴的当前修正电压ud_ctr与第一补偿电压ud之和作为d轴的实际修正电压ud*;s106、将q轴的实际修正电压uq*和d轴的实际修正电压ud*进行反park变换得到电压值,根据电压值的占空比生成pwm波控制步进电机转动。
16.在本实施例中,根据q轴反馈电流计算获取适当的d轴的第一补偿电压ud,根据d轴反馈电流计算获取适当的q轴的第二补偿电压uq,分别利用第一补偿电压和第二补偿电压对d轴电压和q轴电压进行动态补偿,实现励磁电流分量与转矩电流分量的动态解耦,提高步进电机的动态性能,增大步进电机高速时的转矩和平稳性。
17.具体来说,所述根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud的过程包括如下步骤:s1031、获取步进电机的固定常数p,该固定常数为步进电机的反电动势常数;s1032、获取速度环中编码器检测的速度反馈值spd_fdk;s1033、获取步进电机的电感值l;s1034、将步进电机两项正交电流进行park变换后得到q轴反馈电流iq_fdk;s1035、计算第一补偿电压ud,ud=-p*spd_fbk*l*iq_fdk。
18.具体来说,所述根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr包括:s1021、获取d轴给定电流id_ref,一般d轴给定电流的值为0;s1022、将步进电机两项正交电流进行park变换后得到d轴反馈电流id_fdk;s1023、将d轴给定电流id_ref与d轴反馈电流id_fdk作差后经过电流环比例积分控制器得到d轴当前修正电压ud_ctr。
19.具体来说,所述根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq包括:s1041、获取步进电机的固定常数p;
s1042、获取速度环中编码器检测的速度反馈值spd_fdk;s1043、获取步进电机的电感值l;s1044、将步进电机两项正交电流进行park变换后得到d轴反馈电流id_fdk;s1045、获取磁链ψf;s1046、计算第二补偿电压uq,uq= p*spd_fdk*l*id_fdk + p*spd_fdk*ψf。
20.具体来说,所述根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr包括:s1011、获取位置环中的给定位置pos_ref、编码器检测的反馈位置pos_fdk;将给定位置pos_ref与反馈位置pos_fdk作差后经过位置环比例控制器得到位置环控制量pos_ctr;s1012、获取速度环中的给定速度spd_ref、编码器检测的反馈速度spd_fdk;将给定速度spd_ref乘以系数k1再加上位置环控制量pos_ctr后,与反馈速度spd_fdk做差再经过速度环比例积分控制器得到速度环控制量spd_ctr;其中系数k1可以在控制过程中进行调试获取最佳值;s1013、将速度环中的给定速度spd_ref与编码器检测的反馈速度spd_fdk作差后乘以系数k2,再与速度环控制量spd_ctr相加得到q轴给定电流iq_ref;将q轴给定电流iq_ref与q轴反馈电流作差后经过电流环比例积分控制器得到q轴当前修正电压uq_ctr。其中系数k2可以在控制过程中进行调试获取最佳值。
21.在本实施例中,以上控制过程可以参照图2所示,获取d轴当前修正电压ud_ctr之后,利用第一补偿电压ud进行动态补偿得到实际的修正电压ud*,该第一补偿电压ud根据步进电机的固定常数p、速度反馈值spd_fdk、电感值l以及q轴的反馈电流iq_fdk得到;获取q轴当前修正电压uq_ctr之后,利用第二补偿电压uq进行动态补偿得到实际的修正电压uq*,该第二补偿电压根据步进电机的固定常数p、速度反馈值spd_fdk、电感值l、磁链ψf以及d轴的反馈电流id_fdk得到。再利用实际的修正电压ud*、uq*进行步进电机控制量的计算,实现步进电机控制过程中励磁电流分量与转矩电流分量的动态解耦,从而提高步进电机的动态性能,增大步进电机高速时的转矩和平稳性。
22.本实施例所提供的闭环步进电机动态解耦的控制方法是一种矢量控制方法,适用于两相步进电机、三相步进电机等多相步进电机,需要将电流进行park变换成q轴反馈电流iq_fdk和d轴反馈电流id_fdk,且实际的修正电压ud*、uq*需要进行反park变换成电压,park变换与反park变换需要获取电角度电角度θ_ctr,该电角度θ_ctr的获取过程包括:获取编码器检测的反馈位置电角度θ;计算电角度θ_ctr,θ_ctr=θ+spd_fdk*k3+φ,其中k3为系数,φ为角度补偿值,其中系数k3可以在控制过程中进行调试获取最佳值,φ可以根据步进电机的电感、电阻、电流、电压和步进电机反电动势系数计算得到。
23.在本实施例中进一步对电角度θ_ctr进行补偿,实现闭环步进电机电流环磁励电流分量、转矩电流分量和电角度的动态解耦。
24.实施例2参照图3所示,本实施例公开了一种闭环步进电机的控制系统,包括:q轴修正电压获取模块,被配置为根据q轴反馈电流iq_fdk获取q轴当前修正电压uq_ctr;
d轴修正电压获取模块,被配置为根据d轴反馈电流id_fdk获取d轴当前修正电压ud_ctr;d轴补偿电压获取模块,被配置为根据q轴反馈电流iq_fdk获取d轴的第一补偿电压ud;q轴补偿电压获取模块,被配置为根据d轴反馈电流id_fdk获取q轴的第二补偿电压uq;补偿模块,被配置为以q轴当前修正电压uq_ctr与第二补偿电压uq之和作为q轴的实际修正电压uq*;以d轴的当前修正电压ud_ctr与第一补偿电压ud之和作为d轴的实际修正电压ud*;控制模块,被配置为将q轴的实际修正电压uq*和d轴的实际修正电压ud*进行反park变换得到电压值,根据电压值的占空比生成pwm波控制步进电机转动。
25.在本实施例中,利用该闭环步进电机的控制系统控制闭环步进电机的动作,实现闭环步进电机电流环励磁电流分量和转矩电流分量的动态解耦,提高步进电机的动态性能,增大步进电机高速时的转矩和平稳性。
26.需要说明的是,应理解以上装置的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些模块可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分模块通过处理元件调用软件的形式实现,部分模块通过硬件的形式实现。此外这些模块全部或部分可以集成在一起,也可以独立实现。这里所描述的处理元件可以是一种集成电路,具有信号的处理能力。在实现过程中,上述方法的各步骤或以上各个模块可以通过处理器元件中的硬件的集成逻辑电路或者软件形式的指令完成。
27.实施例3本实施例提供了一种存储介质,所述存储介质上存储有计算机程序指令,所述计算机程序指令被计算机读取并运行时,执行实施例1中任一项所述的闭环步进电机的控制方法的步骤。
28.尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1