一种航空低压直流用三级式发电机电源系统及设计方法与流程
1.本发明属于电子电路技术领域,具体涉及一种航空低压直流用三级式发电机电源系统及设计方法。
背景技术:
2.对于航空有人机,通过对可靠性要求较高,需要电机在故障发生后可以通过灭磁来防止故障扩散;需要在正常发电稳压输出时具有 1.5倍额定电流、5min,2倍额定电流、5s的过载能力;需要具备可输出3倍短路电流的能力;需要具有较小的高频段纹波。对于12kw以下的航空有人机,通常采用28v低压直流来为机载设备供电。
3.三级式起动发电机电源系统包括三级式起动发电机和起动发电机控制器两部分,三级式起动发电机用于实现机械能与变压变频交流电能的转化。在起动状态,起动发电机控制器给起动发电机提供交流励磁电流,并将起动电源提供的直流电能转化为变压变频交流电能,给三级式发电机供电,驱动电机由静止状态到达发动机点火转速;在发电状态,起动发电机控制器通过调节励磁电流来稳定三级式起动发电机输出的变频交流电压,并将恒压交流电压转化为28v稳压直流来给航空机载设备供电。
4.对于三级式电机,在高压电源系统和发电机电源系统被普遍使用,但是,三级式电机电源系统存在以下方面的不足:
5.1)普遍应用于高压电源系统,在低压直流电源系统领域应用仍较少;
6.2)普遍应用于发电机电源系统,在起动发电机电源系统的应用还处在发展阶段。
7.对于用于低压直流电源系统的起动发电机系统,目前,有人机普遍采用的是直流有刷起动发电机系统。直流有刷起动发电机系统具有功率密度高,控制简单的优化。但是,直流有刷起动发电机具有以下方面的不足:
8.1)直流有刷起动发电机换相器故障率较高,尤其是在高空运行环境下;
9.2)直流有刷起动发电机的碳刷使用时间较短,需要定期更换;
10.3)工作时,碳刷掉落的碳灰,会使电机的绝缘性能下降。
11.在航空无人机领域的普遍采用永磁起动发电机电源系统,永磁起动发电机系统具有电机设计简单和效率高的优化,但是,永磁起动发电机电源系统具有以下方面的不足:
12.1)永磁起动发电机采用永磁体励磁,在故障发生后,无法通过灭磁来保证起动发电机电源系统的安全性;
13.2)发电时,永磁起动发电机无法通过调节励磁电流方式来时行发电稳压,起动发电机控制器功率密度较低,且实现4kw以上的发电功率较为困难;
14.3)永磁起动发电机电源系统,在考虑1.5倍额定电流、5min,2 倍额定电流、5s的过载能力后,功率密度与三级式起动发电机相比已经无明显优势;
15.4)永磁起动发电机电源系统很难实现3倍短路电流输出能力;
16.5)发电时,起动发电机控制器需要采用高频开关电源技术进行发电稳压,虽然输出电源纹波较小,但是高频段纹波频谱很难满足相关标准要求。
技术实现要素:
17.为解决上述技术问题,本发明提供了一种航空低压直流用三级式发电机电源系统及设计方法。
18.本发明通过以下技术方案得以实现。
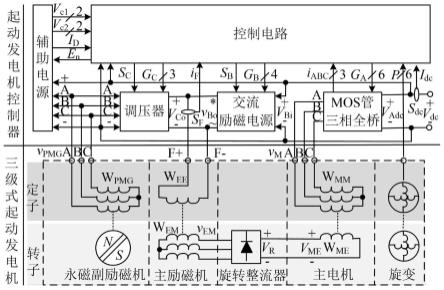
19.本发明提供的一种航空低压直流用三级式发电机电源系统,包括三级式起动发电机与起动发电机控制器,所述三级式起动发电机包括永磁副励磁机、主励磁机、旋转整流管、主电机与旋变;所述起动发电机控制器包括mos管三相全桥、交流励磁电源、调压器、辅助电源、控制电路、电流传感器sf与电流传感器s
dc
;所述永磁副励磁定子电枢绕组w
pmg
输出三相交流v
pwm
的a、b和c端分别与辅助电源和调压器的a、b和c输入端连接,所述主励磁机的转子电枢绕组w
em
输出三相交流v
em
经旋转整流器与主电机转子励磁绕组w
me
连接,主励磁机的定子励磁绕组w
ee
的f+端和f-端与交流励磁电源输出端以及调压器输出端连接,所述主电机的定子电枢绕组w
mm
三相交流vm的a、b和 c端分别与mos管三相全桥的a、b和c端连接,旋变定子输出转速位置信号p与控制电路连接,直流母线
vdc
的+端和-端分别与mos管三相全桥的直流母线v
adc
的+端和-端、交流励磁电源输入v
bi
的+端和-端、输出电源输入的+端和-端以及控制电路连接,调压器的-端与直流母线v
dc
的-端连接,mos管三相全桥输出的三相交流电流信号i
abc
与控制电路连接,控制电路输出的驱动信号ga与mos管三相全桥连接,控制电路输出的驱动信号gb和开关控制信号sb与交流励磁电源连接,控制电路输出的驱动信号gc和开关控制信号sc与调压器连接,辅助电源的两路电源输出v
c1
、v
c2
与控制电路连接,辅助电源输出的电流信号id与控制电路连接,控制电路输出的电源使能信号en与辅助电源连接,电流传感器s
dc
的功率端、输出信号i
dc
分别与直流母线v
dc
的+端、控制电路连接,电流传感器sf的功率端、输出信号if分别与励磁绕组 w
ee
的f+端、控制电路连接。
20.进一步的,所述mos三相全桥包括a相桥臂、b相桥臂、c相桥臂、滤波电容c
dc
、电流传感器s
a1
、s
a2
和s
a3
,驱动信号ga包括g
a1
、 g
a2
、g
a3
、g
a4
、g
a5
与g
a6
,三相交流电流i
abc
包括ia、ib和ic;所述 mos三相全桥的a端与a相桥臂上管q
a1
的源极和下管q
a2
的漏极连接, a相桥臂上管q
a1
的漏极与直流母线v
adc
的+端连接,a相桥臂下管q
a2
的源极s与直流母线v
adc
的-端连接,mos三相全桥的b端与b相桥臂上管q
a3
的源极s和下管q
a4
的漏极d连接,b相桥臂上管q
a3
的漏极与直流母线v
adc
的+端连接,b相桥臂下管q
a4
的源极与直流母线v
adc
的
‑ꢀ
端连接,mos三相全桥的c端与c相桥臂上管q
a5
的源极和下管q
a6
的漏极连接,c相桥臂上管q
a5
的漏极与直流母线v
adc
的+端连接,c相桥臂下管q
a6
的源极与直流母线v
adc
的-端连接,滤波电容c
adc
两端分别与直流母线v
adc
的+端和-端连接构成,电流传感器s
a1
、s
a2
和s
a3
的功率端分别与a、b和c端连接,电流传感器s
a1
、s
a2
和s
a3
分别与输出信号ia、ib和ic对应连接,所述驱动信号g
a1
、g
a2
、g
a3
、g
a4
、g
a5
以及g
a6
分别与q
a1
、q
a2
、q
a3
、q
a4
、q
a5
以及q
a6
对应的栅极连接。
21.进一步的,所述交流励磁电源包括二极管d
b1
,多个升压dc/dc 模块,滤波电容cb,功率管q
b1
、q
b2
、q
b3
以及q
b4
,继电器scr,驱动信号gb包括g
b1
、g
b2
、g
b3
以及g
b4
;是由输入v
bi
的+端与二极管d
b1
的阳极连接,二极管d
b1
的阴极分别与多个升压dc/dc模块输入的+ 端连接,输入v
bi
的-端与多个升压dc/dc模块输入的-端连接,多个升压dc/dc模块输出的+端和-端分别与直流母线vs的+端和-端连接,输入v
bi
的-端与直流母线vs的-端连接,滤波电容cb两端分别直流母线 vs的+端和-端连接,q
b1
的漏极与直流母线vs的+端连接;继电器scr 设有两个开关,其中第一开关的输入端与q
b1
的源极和q
b2
的漏极连接, q
b2
的源极与直流母线vs的-端
连接,q
b3
的漏极与直流母线vs的+端连接,继电器scr的第二开关的输入端与q
b3
的源极s和q
b4
的漏极连接, q
b4
的源极与直流母线vs的-端连接,继电器scr中开关的输出端与输出v
bo
连接,驱动信号g
b1
、g
b2
、g
b3
以及g
b4
分别与q
b1
、q
b2
、q
b3
以及q
b4
的栅极连接,开关控制信号sb与继电器scr的控制端连接。
22.进一步的,所述调压器包括二极管d
c1
、d
c2
、d
c3
、d
c4
、d
c5
、 d
c6
以及d
c7
,功率管q
c1
、q
c2
以及q
c3
,滤波电容cc,继电器gcr,驱动信号gc包括g
c1
~g
c3
;调压器的a端与d
c1
的阳极和d
c2
的阴极连接,调压器的b端与d
c3
的阳极和d
c4
的阴极连接,调压器的c端与d
c5
的阳极和d
c6
的阴极连接;d
c1
、d
c3
和d
c5
的阴极与直流母线vg的+端连接,d
c2
、d
c4
和d
c6
的阳极与直流母线vg的-端连接,滤波电容cc两端分别直流母线vg的+端和-端连接,q
c1
的漏极与直流母线vg的+ 端连接,继电器gcr第一开关的输入端与q
c1
的源极和q
c2
的漏极连接, q
c2
的源极与直流母线vg的-端连接,d
c7
的阴极与直流母线vg的+端连接,继电器gcr中第二开关的输入端与d
c7
的阳极和q
c3
的漏极连接, q
c3
的源极与直流母线vg的-端连接,继电器gcr中开关的与输出v
co
的+端和-端连接,驱动信号g
c1
、g
c2
以及g
c3
分别与q
c1
、q
c2
以及q
c3
的栅极连接,开关控制信号sc与继电器scr的控制端连接。
23.进一步的,所述辅助电源包括二极管d
d1
、d
d2
、d
d3
以及d
d4
,非隔离dc/dc模块,第一隔离dc/dc模块,第二隔离dc/dc模块,电流传感器sd;辅助电源的+端与d
d1
阳极连接,d
d1
阴极与非隔离 dc/dc模块输出的+端连接,d
d2
、d
d3
和d
d4
阳极分别与a、b和c 端连接,d
d2
、d
d3
和d
d4
阴极与非隔离dc/dc模块输入的+端连接,辅助电源的-端与非隔离dc/dc模块输入的-端、非隔离dc/dc模块输出的-端、第一隔离dc/dc模块输出的-端、第二隔离dc/dc模块输出的-端连接,非隔离dc/dc模块输出的+端和-端分别与第一隔离 dc/dc模块输入的+端和-端、第二隔离dc/dc模块输入的+端和-端连接;还包括两个电源,第一隔离dc/dc模块输出的+端和-端与第一电源v
c1
的+端和-端连接,第二隔离dc/dc模块输出的+端和-端与第二电源v
c2
的+端和-端连接,电流传感器sd的功率端与第二电源 v
c2
的+端连接,电流传感器sd输出信号id,电源使能信号en与第二隔离dc/dc模块输入的使能端e连接。
24.一种航空低压直流用三级式发电机电源系统的设计方法,包括以下步骤:
25.步骤1:设额定电流为in,保证三级式起动发电机在最低发电转速、稳压条件下,可输出1.5in;步骤2:保证三级式起动发电机在最高发电转速、负载电流由150%至20%切换时,输出电压不超过45v;步骤3:设主电机电枢绕组平均电感l=(ld+lq)/2,最高发电转速下的感抗x
max
=ω
max
l,使1.5inx
max
《35v;步骤4:设最低发电转速下主励磁机电枢绕组的感抗为x
emin
,最高工作温度下主电机励磁绕组的电阻为r
emax
,保证x
emin
/r
emax
》0.5;步骤5:设主电机励磁绕组的电感为le,最低工作温度下的电阻为r
emin
,保证时间常le/r
emin
《 50ms;步骤6:在发电转速范围内、调压器负载由空载到最大负载条件下,保证三级式起动发电机中永磁副励磁输出整流后电压vg在 12v~45v范围内;步骤7:设交流励磁电源的频率为f,起动时主励磁机最大交流励磁电流有效值为i
fmax
,主励磁机的励磁电感为l
ee
,使130v《2πfl
eeifmax
《170v;步骤8:旋变定子输出转速位置信号p 包括转速信号n和位置信号θ,位置信号θ=0
°
与空载下主电机a 相电压下降段过零点相对应;步骤9:对于调压器中直流母线vg上的电容cc,保证在主励磁励磁绕组上能量全部回馈到电容cc上时,电容cc上的电压仍在允许范围内;步骤10:通过辅助电源实现对控制电路的供电,电源v
c2
用于给控制电路中的功率管驱动电路供电,电源v
c1
用于给控制电路中的其他电路供电,若电源v
c2
的输出电流 id异常时,通过电
源使能信号en禁止隔离电源中隔离dc/dc模块2 工作;步骤11:起动过程中,起动发电机控制器驱动三级式起动发电机由静止到发动机点火转速;步骤12:在发动机到达发电转速之后,进入发电过程,在发电转速、负载变化时,通过调压器和mos 管三相全桥控制稳定输出直流电压v
dc
。
26.进一步的,所述步骤11起动过程包括以下步骤:
27.步骤1101:通过控制电路输出开关控制信号sb和sc,接通继电器scr开关、断开继电器gcr开关;步骤1102:通过交流励磁电源中升压dc/dc模块1、2
……
n将28v的输入电压v
bi
转化为270v 的电压vs,通过多个升压dc/dc模块并联来增加输出功率;步骤1103:通过交流励磁电源中由q
b1
~q
b4
构成的单相h桥给主励磁机提供交流励磁电流;步骤1104:控制电路中采用准速度外环,电流内环的控制策略,通过正弦空间矢量脉冲宽度调制svpwm控制产生mos管三相全桥的驱动信号ga,使起动过程工作在最大转矩电流比模式。
28.进一步的,所述步骤12的发电过程包括以下步骤:
29.步骤1201:通过控制电路输出开关控制信号sb和sc,断开继电器scr开关、接通继电器gcr开关;步骤1202:通过调压器输出励磁电流来调节主电机输出三相交流电压值,进而实现对直流电压 v
dc
的稳压控制;步骤1203:通过mos管三相全桥来一方面实现主电机输出三相交流电压vm到直流电压v
dc
的同步整流,另一方面实现电压v
dc
过低时的升压控制。
30.进一步的,步骤1202中所述的稳压控制包括以下步骤:
31.步骤12021:在控制电路中产生调压器的驱动信号g
c1
,通过采用双环控制产生功率管q
c1
的驱动信号g
c1
,双环控制中电压环为外环,励磁电流环为内环,电压外环用于使输出电压v
dc
跟踪参数电压 v
ref
,并产生电流内环参考信号i
fref
,电流内环用于使主励磁机励磁电流if跟踪参考信号i
fref
,电流内环输出用于控制功率管q
c1
驱动信号 g
c1
的占空比d;步骤12022:根据输出直流电流i
dc
,确定电压外环参考电压v
ref
,设额定电流为in,在i
dc
《2in时,使v
ref
=28v,在i
dc
由2in到3in变化时,使v
ref
由28v减为0v;步骤12023:根据输入转速n,确定电压环输出允许的最大励磁电流i
fmax
,i
fmax
为在转速n、 1.5in下,输出电压v
dc
为期望稳压值所对应的励磁电流;步骤12024:在输入电压v
dc
《40v时,驱动信号g
c3
=1,功率管q
c3
恒导通,功率管q
c2
的驱动信号g
c2
与功率管q
c1
的驱动信号g
c1
互补导通,使续流电流流过功率管q
c2
,而非q
c2
的反向并联二极管;步骤12025:在输入电压v
dc
》40v时,使驱动信号g
c1
~g
c3
均等于0,功率管 q
c1
~q
c3
恒关断,主励磁机的励磁电流经功率管q
c2
的反向并联二极管和二极管dc7,将能量回馈到直流母线vg上,实现快速灭磁。
32.进一步的,步骤1203中所述的升压控制包括以下步骤:
33.步骤12031:根据三相电流ia、ib和ic,确定同步整流控制的驱动信号g
a1g
~g
a6g
,定义三相电流ia、ib和ic流出起动发电机控制器方向为正方向,i
refh
和i
refl
分别为额定电流的+1/5和-1/5,当ia》i
refh
时,使 g
a2g
=1,否则g
a2g
=0,当ib》i
refh
时,使g
a4g
=1,否则g
a4g
=0,当ic》i
refh
时,使g
a6g
=1,否则g
a6g
=0,当ia《i
refl
时,使g
a1g
=1,否则g
a1g
=0,当ib《i
refl
时,使g
a3g
=1,否则g
a3g
=0,当ic《i
refl
时,使g
a5g
=1,否则g
a5g
=0;步骤12032:根据直流电压v
dc
、直流电流i
dc
,确定升压稳压控制的驱动信号g
a1o
~g
a6o
,定义驱动信号g
a2o
下降沿滞后θ=180
°
的角度为δ1,驱动信号g
a2o
的高电平脉冲宽度为δ2,当直流电压v
dc
《24v且i
dc
《2in时,通过增加δ2的宽度来增大有功电流iq使直流电压稳定在24v,通过调节δ1来使无功电流id=0,减小δ1对应减小去磁无功电流id,δ1的调节范围为0~60
°
,δ2的调节范围为0~90
°
,g
a1o
~g
a6o
具有相同
的正脉冲宽度,按g
a2o
、g
a5o
、 g
a4o
、g
a1o
、g
a6o
、g
a3o
依次相差60
°
的方式形成升压稳压控制驱动信号g
a1o
~g
a6o
;步骤12033:根据同步整流控制的驱动信号g
a1g
~g
a6g
和升压稳压控制驱动信号g
a1o
~g
a6o
,确定mos管三相全桥驱动信号 ga,,
34.本发明的有益效果在于:1、提出的航空低压直流用三级式起动发电机电源系统的设计方法,适合于高可靠性要求的航空有人机,相对于直流有刷起动发电机电源系统,三级式起动发电机电源系统可靠性更高、维护更方便,相对于永磁起动发电机电源系统,三级式起动发电机电源系统在故障时可灭磁,安全性更高;
35.2、起动和发电时均采用共同的主励磁机励磁绕组,相对于起动时采用独立三相交流励磁绕组的方式,电机功率密度更高;
36.3、交流励磁电源中通过升压dc/dc模块来将起动电源电压由 28v提高到了270v,解决了起动和发电时共同的主励磁机励磁绕组的兼容性问题;
37.4、起动时的逆变器和发电时的整流器均采用mos管三相全桥实现,实现了起动和发电状态的硬件复用,克服了传统起动机在完成起动任务后成为飞机死重的不足;
38.5、通过采用最大转矩电流比的svpwm控制,有效降低了起动电源的能力需求;
39.6、发电时,采用电压外环,电流内环的数字双环控制,相对于模拟单电压环与电流软反馈控制相结合的方式,控制精度更高,控制参数整定更为容易;
40.7、发电时,随着输出电流i
dc
由2倍额定电流到3倍额定电流变化,使电压环输入参数电压v
ref
由28v减为0v,可有效抑制甩载时的最大电压;
41.8、发电时,将电压环输出允许的最大励磁电流i
fmax
限定在工作转速n、1.5倍额定电流下的励磁电流值,可有效抑制甩载时的最大电压;
42.9、调压器正常工作时,续流管q
c2
工作于同步整流模式,相对于二极管续流方式,效率显著提升;
43.10、调压器采用不对称半桥结构代替传统的buck电路,在输出过压时,调压器可通过断开功率管q
c3
的方式来实现快速灭磁,响应速更快;
44.11、发电时,mos管三相全桥工作于同步整流模式,相对二极管三相全桥整流,功率管导通压降显著降低,效率显著提升;
45.12、通过采用mos管升压稳压控制,可以提高三级式起动发电机系统的动态特性,并可有效抑制甩载时的最大电压。
附图说明
46.图1为本发明的三级式起动发电机电源系统结构框图;
47.图2为本发明的mos管三相全桥电路图;
48.图3为本发明的交流励磁电源电路图;
49.图4为本发明的调压器电路图;
50.图5为本发明的辅助电源电路图;
51.图6为本发明的起动控制原理图;
52.图7为本发明的调压器工作原理图;
53.图8为本发明的调压器中不对称半桥工作原理图;
54.图9为本发明的mos管三相全桥的同步整流驱动信号产生原理图;
55.图10为本发明的mos管三相全桥的升压稳压控制驱动信号产生原理图;
56.图11为本发明的不控整流控制与可控整流控制的矢量图。
具体实施方式
57.下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
58.本实施例为6kw三级式起动发电机电源系统,三级式起动发电机电源系统包括三级式起动发电机和起动发电机控制器两部分。三级式起动发电机系统起动时,起动电源为28v dc,起动转矩为 25n
·
m(0~1000r/min)、10n
·
m(1000~6000r/min)。发电机时,输出为 28vdc,输出功率为6kw(7500r/min~13000r/min),具备150%额定负载、5min和200%额定负载:5s的过载能力;在5s内输出电流不小于300%额定电流的短路能力。实施例应用背景为采用涡桨发动机的航空无人机,机载设备采用28v的lvdc电源系统。
59.图1所示为mos管三相全桥电路图,一种航空低压直流用三级式起动发电机电源系统装置,包括三级式起动发电机和起动发电机控制器,三级式起动发电机包括永磁副励磁机、主励磁机、旋转整流管、主电机、旋变,起动发电机控制器包括mos管三相全桥、交流励磁电源、调压器、辅助电源、控制电路、电流传感器sf和s
dc
;是由永磁副励磁定子电枢绕组w
pmg
输出三相交流v
pwm
的a、b和c端分别与辅助电源和调压器的a、b和c输入端连接,主励磁机的转子电枢绕组w
em
输出三相交流v
em
经旋转整流器与主电机转子励磁绕组w
me
连接,主励磁机的定子励磁绕组w
ee
的f+端和f-端分别与交流励磁电源输出v
bo
的*端和~端、调压器输出v
co
的+端和-端连接,主电机的定子电枢绕组w
mm
三相交流vm的a、b和c端分别与mos 管三相全桥的a、b和c端连接,旋变定子输出转速位置信号p与控制电路连接,直流母线v
dc
的+端和-端分别与mos管三相全桥的直流母线v
adc
的+端和-端、交流励磁电源输入v
bi
的+端和-端、输出电源输入的+端和-端、控制电路连接,调压器的-端与直流母线v
dc
的
‑ꢀ
端连接,mos管三相全桥输出的三相交流电流信号i
abc
与控制电路连接,控制电路输出的驱动信号ga与mos管三相全桥连接,控制电路输出的驱动信号gb和开关控制信号sb与交流励磁电源连接,控制电路输出的驱动信号gc和开关控制信号sc与调压器连接,辅助电源的两路电源输出v
c1
、v
c2
与控制电路连接,辅助电源输出的电流信号id与控制电路连接,控制电路输出的电源使能信号en与辅助电源连接,电流传感器s
dc
的功率端、输出信号i
dc
分别与直流母线v
dc
的 +端、控制电路连接,电流传感器sf的功率端、输出信号if分别与励磁绕组w
ee
的f+端、控制电路连接构成。
60.电流传感器sf采用allegro公司的acs730klctr-40ab-t实现,其量程为-40a~+40a。电流传感器s
dc
采用lem公司的hc5f800-s 实现,其量程为-800a~+800a。控制电路采用dsp+fpga结构,dsp 采用ti公司的tms320f28335pgfa,fpga采用altera公司的 ep3c25e114cn。
61.起动和发电时均采用共同的主励磁机励磁绕组,相对于起动时采用独立三相交流励磁绕组的方式,电机功率密度更高。
62.图2所示为igbt三相全桥电路图。所述mos三相全桥包括a 相桥臂、b相桥臂、c相桥臂、滤波电容c
dc
、电流传感器s
a1
、s
a2
和s
a3
,驱动信号ga包括g
a1
~g
a6
,三相交流电流i
abc
包括
ia、ib和 ic;是由a端与a相桥臂上管q
a1
的源极s和下管q
a2
的漏极d连接,a相桥臂上管q
a1
的漏极d与直流母线v
adc
的+端连接,a相桥臂下管q
a2
的源极s与直流母线v
adc
的-端连接,b端与b相桥臂上管q
a3
的源极s和下管q
a4
的漏极d连接,b相桥臂上管q
a3
的漏极 d与直流母线v
adc
的+端连接,b相桥臂下管q
a4
的源极s与直流母线v
adc
的-端连接,c端与c相桥臂上管q
a5
的源极s和下管q
a6
的漏极d连接,c相桥臂上管q
a5
的漏极d与直流母线v
adc
的+端连接, c相桥臂下管q
a6
的源极s与直流母线v
adc
的-端连接,滤波电容c
adc
两端分别与直流母线v
adc
的+端和-端连接构成,电流传感器s
a1
、s
a2
和s
a3
的功率端分别与a、b和c端连接,电流传感器s
a1
、s
a2
和 s
a3
分别输出信号ia、ib和ic,驱动信号g
a1
~g
a6
分别与q
a1
~q
a6
的栅极g连接。
63.a相、b相和c相桥臂分别采用macmic公司的mos管模块mmn1000db010b。其可承受最大电流为1000a,导通电阻 r
on
=1.7mω(150℃),耐压100v。滤波电容c
adc
采用100支株洲宏达的陶瓷电容ct45-t-x5r-100v-107m并联,单支耐压100v、100μf。电流传感器s
a1
、s
a2
和s
a3
采用lem公司的hc5f800-s实现,其量程为-800a~+800a。
64.起动时的逆变器和发电时的整流器均采用mos管三相全桥实现,实现了起动和发电状态的硬件复用,克服了传统起动机在完成起动任务后成为飞机死重的不足。
65.图3所示为交流励磁电源电路图。所述交流励磁电源包括二极管 d
b1
,升压dc/dc模块1、2
……
n,滤波电容cb,功率管q
b1
~q
b4
,继电器scr,驱动信号gb包括g
b1
~g
b4
;是由输入v
bi
的+端与二极管d
b1
的阳极连接,二极管d
b1
的阴极分别与升压dc/dc模块1、 2
……
n输入的+端连接,输入v
bi
的-端与升压dc/dc模块1、2
……ꢀ
n输入的-端连接,升压dc/dc模块1、2
……
n输出的+端和-端分别与直流母线vs的+端和-端连接,输入v
bi
的-端与直流母线vs的-端连接,滤波电容cb两端分别直流母线vs的+端和-端连接,q
b1
的漏极 d与直流母线vs的+端连接,继电器scr中第一开关的输入端1a与 q
b1
的源极s和q
b2
的漏极d连接,q
b2
的源极s与直流母线vs的
‑ꢀ
端连接,q
b3
的漏极d与直流母线vs的+端连接,继电器scr中第二开关的输入端2a与q
b3
的源极s和q
b4
的漏极d连接,q
b4
的源极s与直流母线vs的-端连接,继电器scr中第一开关的输出端1y 和第二开关的输出端2y分别与输出v
bo
的*端和~端连接,驱动信号 g
b1
~g
b4
分别与q
a1
~q
a6
的栅极g连接,开关控制信号sb与继电器 scr的控制端连接构成。
66.升压dc/dc模块采用升华公司的slbn28500h270sn,并联个数为3个。单个slbn28500h270sn模块允许稳压输入电压范围为 16~40vdc,可承受100ms、55v的瞬态电压,输出电压为270v、500w。 slbn28500h270sn大小为60.6
×
63.1
×
13mm,重量为150g。继电器 scr选用中航工业315厂j400-j1n。功率管q
b1
~q
b4
,每个功率管代号对应选用两支infineon公司mos管ipt60r050g7并联。 ipt60r050g7的单支电流为57a、耐压为650v。
67.交流励磁电源中通过升压dc/dc模块来将起动电源电压由28v 提高到了270v,解决了起动和发电时共同的主励磁机励磁绕组的兼容性问题。
68.图4所示为调压器电路图。所述调压器包括二极管d
c1
~d
c7
,功率管q
c1
~q
c3
,滤波电容cc,继电器gcr,驱动信号gc包括g
c1
~g
c3
;是由a端与d
c1
的阳极和d
c2
的阴极连接,b端与d
c3
的阳极和d
c4
的阴极连接,c端与d
c5
的阳极和d
c6
的阴极连接,d
c1
、d
c3
和d
c5
的阴极与直流母线vg的+端连接,d
c2
、d
c4
和d
c6
的阳极与直流母线 vg的-端连接,滤波电容cc两端分别直流母线vg的+端和-端连接, q
c1
的漏极d与直流母线vg的+端连接,继电器gcr中第一开关的输入端1a与q
c1
的源极s和q
c2
的漏极d连接,q
c2
的源极s与直流母线vg的-端连接,d
c7
的阴极与直流母线vg的+端连接,继电器 gcr中第二开关的输入端2a与d
c7
的阳极和q
c3
的漏极d连接, q
c3
的
源极s与直流母线vg的-端连接,继电器gcr中第一开关的输出端1y和第二开关的输出端2y分别与输出v
co
的+端和-端连接,驱动信号g
c1
~g
c3
分别与q
c1
~q
c3
的栅极g连接,开关控制信号sc与继电器scr的控制端连接构成。
69.二极管d
c1
~d
c6
选用mbrb20200ct,耐压200v、电流20a、导通压降0.7v。电容cc选用陶瓷电容ct45-t-x5r-100v-107m多支并联实现,其耐压100v、单支容量100μf。功率mos管q
c1
~q
c3
选用infineon公司的汽车器功率管iaut300n10s5n015,其耐压为100v,电流为300a,导通电阻为1.5mω。二极管d
c7
采用功率管 iaut300n10s5n015的反向并联二极管实现。继电器gcr选用315 厂j400-j1n。
70.图5所示为辅助电源电路图,所述辅助电源包括二极管d
d1
~d
d4
,非隔离dc/dc模块,隔离dc/dc模块1,隔离dc/dc模块2,电流传感器sd;是由+端与d
d1
阳极连接,d
d1
阴极与非隔离dc/dc模块输出的+端连接,d
d2
、d
d3
和d
d4
阳极分别与a、b和c端连接,d
d2
、 d
d3
和d
d4
阴极与非隔离dc/dc模块输入的+端连接,-端与非隔离 dc/dc模块输入的-端、非隔离dc/dc模块输出的-端、隔离dc/dc 模块1输出的-端、隔离dc/dc模块2输出的-端连接,非隔离dc/dc 模块输出的+端和-端分别与隔离dc/dc模块1输入的+端和-端、隔离dc/dc模块2输入的+端和-端连接,隔离dc/dc模块1输出的+ 端和-端与第一电源v
c1
的+端和-端连接,隔离dc/dc模块2输出的+ 端和-端与第二电源v
c2
的+端和-端连接,电流传感器sd的功率端与电源v
c2
的+端连接,电流传感器sd输出信号id,电源使能信号en与隔离dc/dc模块2输入的使能端e连接构成。
71.二极管d
d1
~d
d4
选用mbrb20200ct,耐压200v、电流20a、导通压降0.7v。非隔离dc/dc模块采用四川升华公司 nsl28u2k4h60sn,有效输入稳压范围为9~60v,输出稳压值设置为30v。隔离dc/dc模块1和隔离dc/dc模块2分别采用四川升华公司的电源模块say2410h05s和sd24100h12s产生5v电源v
c1
和 12v电源v
c2
。电流传感器sd采用allegro公司的 acs724llctr-05ab-t实现,其量程为-5a~+5a。
72.一种航空低压直流用三级式起动发电机电源系统的设计方法,包括以下步骤:
73.步骤1:设额定电流为in,保证三级式起动发电机在最低发电转速、稳压条件下,可输出1.5in;
74.步骤2:保证三级式起动发电机在最高发电转速、负载电流由 150%至20%切换时,输出电压不超过45v;
75.步骤3:设主电机电枢绕组平均电感l=(ld+lq)/2,最高发电转速下的感抗x
max
=ω
max
l,使1.5inx
max
《35v;
76.步骤4:设最低发电转速下主励磁机电枢绕组的感抗为x
emin
,最高工作温度下主电机励磁绕组的电阻为r
emax
,保证x
emin
/r
emax
》0.5;
77.步骤5:设主电机励磁绕组的电感为le,最低工作温度下的电阻为r
emin
,保证时间常le/r
emin
《50ms;
78.步骤6:在发电转速范围内、调压器负载由空载到最大负载条件下,保证三级式起动发电机中永磁副励磁输出整流后电压vg在 12v~45v范围内;
79.步骤7:设交流励磁电源的频率为f,起动时主励磁机最大交流励磁电流有效值为i
fmax
,主励磁机的励磁电感为l
ee
,使130v《2π fl
eeifmax
《170v;
80.步骤8:旋变定子输出转速位置信号p包括转速信号n和位置信号θ,位置信号θ=0
°
与空载下主电机a相电压下降段过零点相对应;
81.步骤9:对于调压器中直流母线vg上的电容c
c,
保证在主励磁励磁绕组上能量全部回馈到电容cc上时,电容cc上的电压仍在允许范围内;
82.步骤10:通过辅助电源实现对控制电路的供电,电源v
c2
用于给控制电路中的功率管驱动电路供电,电源v
c1
用于给控制电路中的其他电路供电,若电源v
c2
的输出电流id异常时,通过电源使能信号 en禁止隔离电源中隔离dc/dc模块2工作;
83.步骤11:起动过程中,起动发电机控制器驱动三级式起动发电机由静止到发动机点火转速;
84.步骤12:在发动机到达发电转速之后,进入发电过程,在发电转速、负载变化时,通过调压器和mos管三相全桥控制稳定输出直流电压v
dc
。
85.结合图6所示起动控制原理图,对步骤11所述的起动过程控制进行说明,包括以下步骤:
86.步骤1101:通过控制电路输出开关控制信号sb和sc,接通继电器scr开关、断开继电器gcr开关;
87.步骤1102:通过交流励磁电源中升压dc/dc模块1、2
……
n将 28v的输入电压v
bi
转化为270v的电压vs,通过多个升压dc/dc 模块并联来增加输出功率;
88.步骤1103:通过交流励磁电源中由q
b1
~q
b4
构成的单相h桥给主励磁机提供交流励磁电流;
89.步骤1104:控制电路中采用准速度外环,电流内环的控制策略,通过正弦空间矢量脉冲宽度调制svpwm控制产生mos管三相全桥的驱动信号ga,使起动过程工作在最大转矩电流比模式。
90.在采用最大转矩/电流比控制时,id与i
ref
的关系如式(1)所示, iq表达式如式(2)所示。
[0091][0092]
式中,u0为空载下相电压有效值。
[0093][0094]
通过采用最大转矩电流比的svpwm控制,有效降低了起动电源的能力需求。
[0095]
步骤12所述发电过程控制,包括以下步骤:
[0096]
步骤1201:通过控制电路输出开关控制信号sb和sc,断开继电器scr开关、接通继电器gcr开关;
[0097]
步骤1202:通过调压器输出励磁电流来调节主电机输出三相交流电压值,进而实现对直流电压vdc的稳压控制;
[0098]
步骤1203:通过mos管三相全桥来一方面实现主电机输出三相交流电压vm到直流电压vdc的同步整流,另一方面实现电压vdc 过低时的升压控制。
[0099]
结合图7所示调压器工作原理图和图8所示调压器中不对称半桥工作原理图,对步骤12中步骤1202所述调压器稳压控制进行说明,包括以下步骤:
[0100]
步骤12021:在控制电路中产生调压器的驱动信号g
c1
,通过采用双环控制产生功率
管q
c1
的驱动信号g
c1
,双环控制中电压环为外环,励磁电流环为内环,电压外环用于使输出电压v
dc
跟踪参数电压 v
ref
,并产生电流内环参考信号i
fref
,电流内环用于使主励磁机励磁电流if跟踪参考信号i
fref
,电流内环输出用于控制功率管q
c1
驱动信号 g
c1
的占空比d;
[0101]
步骤12022:根据输出直流电流i
dc
,确定电压外环参考电压v
ref
,设额定电流为in,在i
dc
《2in时,使v
ref
=28v,在i
dc
由2in到3in变化时,使v
ref
由28v减为0v;
[0102]
步骤12023:根据输入转速n,确定电压环输出允许的最大励磁电流i
fmax
,i
fmax
为在转速n、1.5in下,输出电压v
dc
为期望稳压值所对应的励磁电流;
[0103]
步骤12024:在输入电压v
dc
《40v时,驱动信号g
c3
=1,功率管 q
c3
恒导通,功率管q
c2
的驱动信号g
c2
与功率管q
c1
的驱动信号g
c1
互补导通,使续流电流流过功率管q
c2
,而非q
c2
的反向并联二极管;
[0104]
步骤12025:在输入电压v
dc
》40v时,使驱动信号g
c1
~g
c3
均等于0,功率管q
c1
~q
c3
恒关断,主励磁机的励磁电流经功率管q
c2
的反向并联二极管和二极管dc7,将能量回馈到直流母线vg上,实现快速灭磁。
[0105]
采用电压外环,电流内环的数字双环控制,相对于模拟单电压环与电流软反馈控制相结合的方式,控制精度更高,控制参数整定更为容易。
[0106]
随着输出电流i
dc
由2倍额定电流到3倍额定电流变化,使电压环输入参数电压v
ref
由28v减为0v,可有效抑制甩载时的最大电压。
[0107]
将电压环输出允许的最大励磁电流i
fmax
限定在工作转速n、1.5 倍额定电流下的励磁电流值,可有效抑制甩载时的最大电压。
[0108]
调压器正常工作时,续流管q
c2
工作于同步整流模式,相对于二极管续流方式,效率显著提升。
[0109]
调压器采用不对称半桥结构代替传统的buck电路,在输出过压时,调压器可通过断开功率管q
c3
的方式来实现快速灭磁,响应速更快。
[0110]
结合图9所示mos管三相全桥的同步整流驱动信号产生原理图和图10所示mos管三相全桥的升压稳压控制驱动信号产生原理图,对步骤12中步骤1203所述mos管三相全桥升压控制进行说明,包括以下步骤:
[0111]
步骤12031:根据三相电流ia、ib和ic,确定同步整流控制的驱动信号g
a1g
~g
a6g
,定义三相电流ia、ib和ic流出起动发电机控制器方向为正方向,i
refh
和i
refl
分别为额定电流的+1/5和-1/5,当ia》i
refh
时,使g
a2g
=1,否则g
a2g
=0,当ib》i
refh
时,使g
a4g
=1,否则g
a4g
=0,当ic》i
refh
时,使g
a6g
=1,否则g
a6g
=0,当ia《i
refl
时,使g
a1g
=1,否则g
a1g
=0,当ib《i
refl
时,使g
a3g
=1,否则g
a3g
= 0,当ic《i
refl
时,使g
a5g
=1,否则g
a5g
=0;
[0112]
步骤12032:根据直流电压v
dc
、直流电流i
dc
,确定升压稳压控制的驱动信号g
a1o
~g
a6o
,定义驱动信号g
a2o
下降沿滞后θ=180
°
的角度为δ1,驱动信号g
a2o
的高电平脉冲宽度为δ2,当直流电压 v
dc
《24v且i
dc
《2in时,通过增加δ2的宽度来增大有功电流iq使直流电压稳定在24v,通过调节δ1来使无功电流id=0,减小δ1对应减小去磁无功电流id,δ1的调节范围为0~60
°
,δ2的调节范围为 0~90
°
,g
a1o
~g
a6o
具有相同的正脉冲宽度,按g
a2o
、g
a5o
、g
a4o
、 g
a1o
、g
a6o
、g
a3o
依次相差60
°
的方式形成升压稳压控制驱动信号 g
a1o
~g
a6o
;
[0113]
步骤12033:根据同步整流控制的驱动信号g
a1g
~g
a6g
和升压稳压控制驱动信号g
a1o
~g
a6o
,确定mos管三相全桥驱动信号ga,
[0114]
发电时,mos管三相全桥工作于同步整流模式,相对二极管三相全桥整流,功率管导通压降显著降低,效率显著提升。
[0115]
图11所示不控整流控制与可控整流控制的矢量图。对于常规不控整流,在甩载时,结合图11不可控整流相量图对其造成输出电压过冲的原因进行说明,主要是由于两方面原因造成的,一方面为电机主电枢电感上存储的能量释放到母线上所致的,电枢绕组电感储能 1/2
·
li
s2
是造成第一个电压尖峰值原因。另一方面为重载下为了克服主电机电枢绕组电感上的压降(图11不可控整流相量图中i
d1
xd和i
q1
x
q1
造成的)和电枢电流i
s1
中弱磁电流i
d1
分量造成的反电势下降(图11 不可控整流相量图中i
d1
xd造成的),提高了励磁电流,使励磁电流过高,对应空载下的反电势较大(如图11不可控整流相量图中e
01
所示);甩载后,主电机电枢绕组电感上的压降显著降低,形成弱磁效应的电枢反应也较低,过高的反电势直接传递到了输出端,同时,由于主电机机电常数较大,主电机励磁电流不能很快恢复;这是造成第二个电压尖峰值的原因。
[0116]
当采用所述的升压稳压控制时,结合图11可控整流相量图对其发电稳压原理进行说明。通过调节电流相位由不控整流时的滞后us变为超前us,使电流相量i
s2
与空载反电势e
02
相位相反。此时,电枢电流i
s2
不存在弱磁分量i
d2
,输出电压幅度|us|是高于空载反电势幅度|e
02
|的,与不控整流下的输出电压幅度|us|是低于空载反电势幅度 |e
01
|截然不同。在相同的输出电压幅度|us|情况下,对应的空载反电势 |e
02
|明显小于不控整流下的|e
01
|。同时相电流i
s2
的全部分量均为有功电流分量i
q2
,与不控整流下的i
q1
相等,而不再存在不控整流时的无功率电流分量i
d1
,故电枢绕组电流的幅度|i
s2
|也明显低于不控整流时的|i
s1
|。
[0117]
对于第一个尖峰,由于小于故可控整流下第一个尖峰较小;对于第二个尖峰,由于空载反电势|e
02
|明显小于不控整流下的|e
01
|,故可控整下的第二个类峰也较小。
[0118]
对于突然加载情况,由于重载下需要较大励磁电流,一方面,电枢绕组感量导到电流上升时间受限,造成了第一个电压跌落峰;由一方面,由于主电机而励磁电流上升需要一定时间,造成了第二个电压跌落峰。采用可控整流后,当检测到输出电压低于某一数值时,即可启动进行可控制整流控制进行升压控制器,由于升压稳压控制响应时间为1/6个电频率周期,响应较快,对两个电压跌落峰均有补偿效果。
[0119]
通过采用mos管升压稳压控制,可以提高三级式起动发电机系统的动态特性,并可有效抑制甩载时的最大电压。本发明提出的航空低压直流用三级式起动发电机电源系统的设计方法,适合于高可靠性要求的航空有人机,相对于直流有刷起动发电机电源系统,三级式起动发电机电源系统可靠性更高、维护更方便,相对于永磁起动发电机电源系统,三级式起动发电机电源系统在故障时可灭磁,安全性更高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1