永磁同步电机的转子初始位置检测方法
1.本发明涉及一种永磁同步电机的转子初始位置检测方法。
背景技术:
2.电机转子初始位置检测策略,在永磁同步电机无速度传感器控制系统中具有十分重要的作用。目前适合初始位置检测的方法有预定位法、测试矢量励磁和电流幅值测量方法、基于高频电压信号注入和相位检测的初始位置预估方法以及电压矢量注入法。
3.预定位法实现简单,缺点是无法带载启动;测试矢量励磁和电流幅值测量法不依赖电机的参数,但算法的计算过程太慢,测试过程中电机容易振动,产生噪声;基于高频电压信号注入和相位检测的初始位置预估方法仅仅能够估计电机初始位置,不适合低速和高速运行,而且该方法依赖电机参数,对电机参数变化比较敏感。
技术实现要素:
4.本发明的目的在于提供一种永磁同步电机的转子初始位置检测方法。
5.为解决上述问题,本发明提供一种永磁同步电机的转子初始位置检测方法,包括:
6.向永磁同步电机的定子绕组分别注入沿90
°
和180
°
的2个电压脉冲矢量,分别得到2组第一电流响应;基于分别得到的2组第一电流响应,计算出d轴初定角;
7.注入沿电机d轴初定角和初定角加90
°
的2个电压脉冲矢量,分别得到2组第二电流响应;对比2组第二电流响应的幅值来确认电机d轴的位置;
8.施加1组沿电机d轴方向的电压脉冲矢量并基于电机d轴的位置,以区分永磁同步电机的转子n和s极。
9.进一步的,在上述方法中,沿90
°
和180
°
的2个电压脉冲矢量幅值和持续时间均相等。
10.进一步的,在上述方法中,向永磁同步电机的定子绕组分别注入沿90
°
和180
°
的2个电压脉冲矢量,分别得到2组第一电流响应,包括:
11.向永磁同步电机的定子绕组分别注入沿90
°
和180
°
的2个电压脉冲矢量,分别采集α、β轴的电压电流响应幅值。
12.进一步的,在上述方法中,基于分别得到的2组第一电流响应,计算出d轴初定角,包括:
13.基于采集到的α、β轴的电压电流响应幅值,计算出d轴初定角。
14.进一步的,在上述方法中,沿d轴初定角和初定角加90
°
的2个电压脉冲矢量的幅值和持续时间均相等。
15.进一步的,在上述方法中,注入沿电机d轴初定角和初定角加90
°
的2个电压脉冲矢量,分别得到2组第二电流响应,包括:
16.注入沿电机d轴初定角和初定角加90
°
的2个电压脉冲矢量,分别得到两次脉冲电流id幅值。
17.进一步的,在上述方法中,对比2组第二电流响应的幅值来确认电机d轴的位置,包括:
18.通过比较两次脉冲电流id幅值的大小,得出电机d轴的位置。
19.进一步的,在上述方法中,施加1组沿电机d轴方向的电压脉冲矢量并基于电机d轴的位置,以区分永磁同步电机的转子n和s极,包括:
20.沿电机d轴方向的注入一个电压脉冲矢量,通过观测转子微动的方向并基于电机d轴的位置来区分n和s极。
21.进一步的,在上述方法中,通过观测转子微动的方向并基于电机d轴的位置来区分n和s极,包括:
22.如果转子有正转趋势,表明转子n极的位置为电机d轴的位置;
23.如果转子有反转趋势,表明转子n极的位置为电机d轴的位置加180度。
24.与现有技术相比,本发明通过使用瞬时电压矢量注入法检测表贴式永磁同步电机转子初始位置的方法,提出五脉冲电压矢量注入方式,通过计算及对比不同电压矢量注入电机所产生的电流响应的峰值结合的方法,进一步提高了转子位置估算的精度。
附图说明
25.图1为永磁同步电机模型的示意图;
26.图2为rl电路的零状态电流响应的示意图;
27.图3为施加电压矢量次序的示意图;
28.图4为电机转子初始位置检测框图的示意图;
29.图5为电压脉冲v1、v2注入下的电压电流响应的示意图;
30.图6为电压脉冲v3、v4注入下的d轴电流响应的示意图;
31.图7为电压脉冲v5注入电机的转动趋势的示意图;
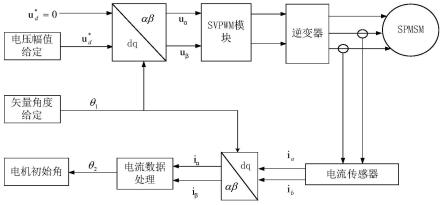
32.图8为电机转子微动的幅度的示意图;
33.图9为转子估算位置与实际位置的对比图;
34.图10为电机与注入电压的参数的示意图。
具体实施方式
35.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
36.永磁同步电机模型如图1所示。在定子静止两相αβ坐标系下,凸机永磁同步电机的数学模型可表示为:
[0037][0038]
其中
[0039][0040]
式中:u,i为在αβ坐标系下的定子电压和定子电流;r为定子相电阻;ψ
pm
为永磁磁
链;θr为转子位置;ω转子旋转电角速度;l1、l2为定子共模电感和差模电感;d为微分算子。对于表贴式永磁同步电机,其交直轴电感相近,l1>>l2。当电机处于静止状态时反电动势为零,式(1)简化为:
[0041][0042]
在转子静止时,向定子绕组施加幅值恒定的电子矢量,其实质为rl电路的零状态响应,数学模型为,
[0043][0044]
得
[0045]
i(t)=u[1-e-(r/l)t
]/r
ꢀꢀꢀ
(5)
[0046]
rl电路的零状态响应如图2所示。
[0047]
若对永磁同步电机定子施加2次线性无关的电压矢量,可以得到2次电流响应为:
[0048][0049]
如图2所示,如果将检测到的电流峰值作为电流响应的变化量,引入电流平均变化率,电感矩阵方阵可表示为:
[0050][0051][0052]
则转子位置可表示为:
[0053][0054]
式中i
α1
、i
β1
、i
α2
、i
β2
分别为αβ坐标系下2次电压脉冲的电流响应峰值。
[0055]
式(8)给出了估计转子位置的实用公式,由于斜率误差系数kc(t)和采样时间δt均被约去,因此最后得到的转子位置表达式与采样时间无关。
[0056]
由式(8)可知,对永磁同步电机定子绕组施加2个线性无关的电压脉冲矢量,理论上即可求出电机初始角。但由于计算公式的限制,只能计算
±
45
°
的初始角,实际上互差90
°
的初始角计算结果也很相近。
[0057]
考虑计算公式的限制对估算结果造成误判的影响,本发明提出了一种改进的五电
压脉冲法,首先注入沿90
°
和180
°
2个电压脉冲v1、v2,分别得到2组第一电流响应,计算出d轴初定角。假设实际d轴位置在v3方向附近,在此基础上,注入沿d轴初定角和初定角加90
°
的2个电压脉冲v3、v4,分别得到2组第二电流响应,通过对比2组第二电流响应的幅值来确认d轴的位置。最后施加1组沿上述确定的d轴方向的电压矢量v5以区分转子n和s极,电压矢量注入的次序如图3所示。
[0058]
下面将结合附图,对本技术中的技术方案进行描述。
[0059]
图4为电机转子初始位置检测框图的示意图。
[0060]
采用如图10所示的参数,假设电机实际转子初始角为30
°
,在matlab中进行仿真验证理论的正确性。转子静止时,向定子绕组分别施加2次沿90
°
和180
°
2个电压脉冲矢量,其幅值和持续时间均相等,分别采集α、β轴的电压电流响应幅值,如图5所示,通过式(8)计算出d轴的初定角。
[0061]
在此基础上,计算出初定角为29.7
°
,因为计算公式的限制,电机实际角度可能和初定角相差90
°
,所以分别沿29.7
°
以及119.7
°
施加电压脉冲矢量,其幅值和持续时间均相等,通过比较两次脉冲电流id幅值的大小,得出电机d轴位于29.7
°
的轴线上,如图6所示。
[0062]
最后沿29.7
°
注入一个脉冲电压矢量,通过观测转子微动的方向来区分n和s极。如果转子有正转趋势,表明转子n极为29.7
°
,反之为209.7
°
,如图7所示。理论上在检测过程中是不允许转子转动,但在实际的检测过程中,电机位置仅发生微小的波动现象,幅度在1
°
以内,如图8所示,不影响整个检测结果。
[0063]
本发明提出了基于五脉冲电压注入永磁同步电机的转子初始位置检测方法。通过计算及分析注入电压对电流响应的影响相结合的方式,去准确判断电机转子d轴所在位置,进一步判别ns极,最后通过仿真结果验证了所提策略的正确性和有效性转子估算位置与电机转子实际位置对比图如9所示。
[0064]
综上所述,本发明使用瞬时电压矢量注入法检测表贴式永磁同步电机转子初始位置的方法,提出五脉冲电压矢量注入方式,通过计算及对比不同电压矢量注入电机所产生的电流响应的峰值结合的方法,进一步提高了转子位置估算的精度。
[0065]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0066]
专业人员还可以进一步意识到,结合本发明中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0067]
显然,本领域的技术人员可以对发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1