一种输电线除冰机器人的除冰机构及输电线除冰机器人的制作方法
1.本发明涉及机器人技术领域,特别是涉及一种输电线除冰机器人的除冰机构及输电线除冰机器人。
背景技术:
2.输电线路起输送电力的重要作用,冬天输电线覆冰会导致杆塔倾斜、倒塌、断路及绝缘子闪络等情况发生,由此引起线路跳闸、供电中断等事故将给工农业生产和人们生活造成严重的影响。输电线大多是多根细线缠绕在一起,冰会深入到细线的缝隙里,但现有输电线路除冰主要采用往复运动式除冰机构,这种机构通过往复铲除输电线上的冰,除冰不彻底、不干净。
技术实现要素:
3.为解决上述技术问题,本发明提供一种输电线除冰机器人的除冰机构。
4.本发明的另一个目的是提供一种具有前述输电线除冰机器人的除冰机构的输电线除冰机器人。
5.本发明采用以下技术方案:一种输电线除冰机器人的除冰机构,包括:夹冰机构,包括夹冰驱动电机、曲柄滑块传动组件以及两夹冰组件,所述夹冰驱动电机通过所述曲柄滑块传动组件与所述夹冰组件传动连接,通过所述夹冰驱动电机驱动两所述夹冰组件相对活动夹碎输电线上的覆冰;铲碾机构,设置在所述夹冰机构后方,包括铲碾驱动电机、两铲碾组件,所述铲碾驱动电机通过丝杆传动组件和两所述铲碾组件连接,所述铲碾驱动电机通过丝杆传动组件可驱动两所述铲碾组件之间同步相向靠近或背向远离运动,所述铲碾组件具有碾压轮和铲刀;所述除冰机构作业时,通过两所述铲碾组件相靠近后碾压轮夹紧输电线并通过碾压轮对输电线上的覆冰碾压,通过所述铲刀铲除所述输电线上的覆冰。
6.可选地,还包括安装板,所述丝杆传动组件包括可轴向转动的设于所述安装板的双向丝杆、和所述双向丝杆配合的第一丝杆螺母和第二丝杆螺母,所述双向丝杆和所述铲碾驱动电机传动连接,所述第一丝杆螺母和一个所述铲碾组件固定连接,所述第二丝杆螺母和另一个所述铲碾组件固定连接,所述铲碾组件和所述安装板可滑动的连接。
7.可选地,所述安装板设有用于安装所述丝杆传动组件的第一端盖和第二端盖,所述双向丝杆可转动的设于所述第一端盖和所述第二端盖上。
8.可选地,所述铲碾组件包括支架,所述丝杆传动组件还包括固定于所述第一端盖和所述第二端盖的导轨,所述支架设有滑孔,所述导轨设于所述滑孔内,所述滑孔和所述导轨之间设有导向衬套,所述导向衬套和所述滑孔之间设有用于限位的卡簧,所述支架设有和所述第一丝杆螺母/第二丝杆螺母连接的容置孔。
9.可选地,所述铲碾组件包括支架,所述支架通过轮轴和碾压轮连接,所述支架设有用于安装轮轴的轴孔,所述轮轴和所述轴孔之间设有轴承,所述轮轴的端部设有防止所述轮轴和所述支架轴向移动的端盖,所述铲刀和所述支架固定连接。
10.可选地,还包括安装板,所述夹冰组件包括夹具组件,所述夹具组件的一端和所述安装板可转动的连接,所述夹冰驱动电机通过所述曲柄滑块传动组件驱动所述夹具组件相对于所述安装板往复摆动。
11.可选地,所述曲柄滑块传动组件设有两组,所述曲柄滑块传动组件包括凸轮和随动器,所述凸轮和所述安装板可转动的连接,所述凸轮和所述夹冰驱动电机传动连接,所述随动器一端和所述凸轮固定连接,所述凸轮和所述随动器的连接点、所述凸轮和所述夹冰驱动电机的连接点分处于所述凸轮的不同位置,所述随动器另一端和所述夹具组件可滑动的连接,所述夹具组件设有引导所述随动器往复滑动的滑槽。
12.可选地,所述夹具组件包括摇杆和夹具,所述夹具和所述摇杆固定连接,所述摇杆的一端和所述安装板铰接,所述滑槽设于所述摇杆,两所述夹具相对的一面各设有六个用于漏碎冰的缺口,两所述夹具背向的一面设有两个用于出冰的退冰口,所述夹具的前端具有倾斜的刀口。
13.可选地,所述夹冰驱动电机通过齿轮组和所述凸轮连接,所述齿轮组包括第一齿轮、第二齿轮和第三齿轮,所述第一齿轮和所述夹冰驱动电机的输出轴固定连接,所述第一齿轮和所述第二齿轮/第三齿轮相啮合,第二齿轮和第三齿轮啮合,所述第二齿轮和其中一组曲柄滑块传动组件的凸轮连接,所述第三齿轮和另一组曲柄滑块传动组件的凸轮连接,所述安装板设有光槽传感器,所述第二齿轮/第三齿轮设有挡光片,当所述第二齿轮/第三齿轮转动到使两所述夹冰组件之间张开距离最大时,所述挡光片遮挡所述光槽传感器以触发所述光槽传感器。
14.一种输电线除冰机器人,包括机器人本体,所述机器人本体设有用于驱使其在输电线上行走的行走机构,机器人本体通过可举升的举升臂连接有除冰机构,所述除冰机构采用如上述任意一项所述的一种输电线除冰机器人的除冰机构。
15.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:采用上述技术方案,除冰机构通过设置夹冰机构和铲碾机构,除冰时可以先通过夹冰机构夹碎输电线上的冰,然后通过铲碾机构的铲刀铲除电线上的冰,然后通过碾压轮碾压输电线使输电线变形,以使输电线缝隙里的冰被碾碎掉落,除冰彻底干净。
附图说明
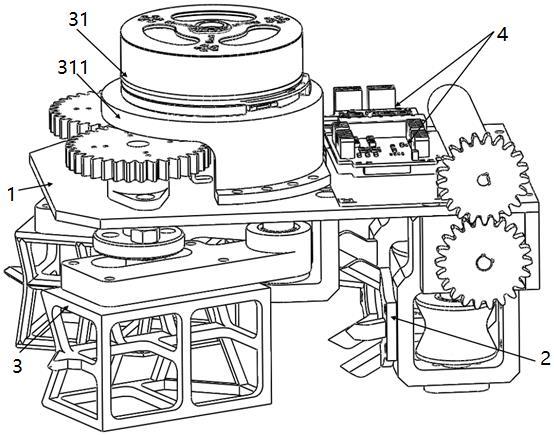
16.图1为本发明的输电线除冰机器人除冰机构总体结构示意图;图2为本发明铲碾机构总体结构示意图;图3为本发明的铲碾组件示意图;图4为本发明的夹冰机构示意图;图5为本发明夹冰机构的部分结构爆炸图;图6为本发明夹具示意图;图7为本发明除冰机构的工作流程图。
17.示意图中的标号说明:
1、安装板;11、第一端盖;12、第二端盖;13、光槽传感器;14、支撑件;141、铜套;2、铲碾机构;20、铲碾驱动电机;201、第一电机支架;21、支架;211、轴孔;212、滑孔;213、容置孔;22、碾压轮;221、轮轴;223、端盖;23、铲刀;24、双向丝杆;25、导轨;26、第一丝杆螺母;27、导向衬套;28、卡簧;3、夹冰机构;31、夹冰驱动电机;311、第二电机支架;312、第一齿轮;32、凸轮;321、凸轮轴;322、锁紧螺母;33、随动器;34、摇杆;341、滑槽;35、夹具;351、缺口;352、退冰口;353、刀口;354、第二齿轮;355、第三齿轮;3551、挡光片;3552、轴承支座;4、驱动器;5、转轴;51、限位轴套;52、转动轴承;61、第四齿轮;62、第五齿轮。
具体实施方式
18.为进一步了解本发明的内容,结合附图1-7及实施例对本发明作详细描述。
19.结合附图1-7,本实施例的一种输电线除冰机器人,包括机器人本体,机器人本体设有用于驱使其在输电线上行走的行走机构,机器人本体通过可举升的举升臂连接有除冰机构。输电线除冰机器人的除冰机构包括安装板1、设于安装板1的铲碾机构2和设于安装板1的夹冰机构3。铲碾机构2设于夹冰机构的后方。夹冰机构3用于夹碎输电线上较厚的冰。铲碾机构2用于铲除输电线上的冰,并碾压输电线,使输电线缝隙里的冰被碾碎掉落,使除冰干净彻底。
20.夹冰机构3包括夹冰驱动电机31、两夹冰组件,两夹冰组件各设于输电线的左右两侧。夹冰驱动电机31通过第二电机支架311安装于安装板1。夹冰驱动电机31可驱动两夹冰组件相对张开或相对夹切输电线。
21.夹冰驱动电机31通过齿轮组驱动两夹冰组件活动。齿轮组包括第一齿轮312、第二齿轮354和第三齿轮355。第一齿轮312和夹冰驱动电机31的输出轴固定连接。第二齿轮354和第三齿轮355均通过轴承支座3552可转动的设于安装板1,第二齿轮354和第三齿轮355的尺寸一致,并且第二齿轮354和第三齿轮355啮合,第一齿轮312和第二齿轮354/第三齿轮355啮合。夹冰机构3还包括两组曲柄滑块传动组件,夹冰驱动电机31通过曲柄滑块传动组件与夹冰组件传动连接。夹冰组件包括夹具组件,由于夹冰组件设有两个,所以夹具组件设有两个。第二齿轮354连接其中一个夹冰组件的曲柄滑块传动组件,第三齿轮355连接另一个夹冰组件的曲柄滑块传动组件。夹具组件和安装板1可转动的连接,曲柄滑块传动组件传动可使夹具组件相对于安装板1摆动。
22.曲柄滑块传动组件包括凸轮32、凸轮轴321和随动器33。凸轮32和凸轮轴321固定连接,凸轮轴321安装于轴承支座3552。其中一个夹冰组件的凸轮轴321和第二齿轮354固定连接,另一个夹冰组件的凸轮轴321和第三齿轮355固定连接,以使第二齿轮354/第三齿轮355转动时对凸轮轴321传递力矩。随动器33一端和凸轮32通过锁紧螺母322固定连接。凸轮32和凸轮轴321的连接点、凸轮32和随动器33的连接点分处于凸轮32的不同位置。凸轮轴321和凸轮32的连接点位于凸轮32的中心处,随动器33和凸轮32的连接点位于凸轮32的偏心处。随动器33另一端和夹具组件可滑动的连接。夹具组件包括夹具35和摇杆34。夹具35和摇杆34固定连接,摇杆34设有滑槽341,随动器33另一端设有可滚动的滚子,滚子设于滑槽341内。摇杆34通过支撑件14和安装板1连接,支撑件14和安装板1固定连接,摇杆34通过转轴5和支撑件14铰接。转轴5和支撑件14之间设有转动轴承52、铜套141和限位轴套51,铜套141和限位轴套51用于防止转轴5和支撑件14相对轴向滑动,转动轴承52使转轴5和支撑件
14之间形成转动副。
23.作业时,夹冰驱动电机31通过齿轮组带动凸轮32转动,凸轮32转动带动随动器33的另一端在滑槽341内滑动,并且由于摇杆34和安装板1可相对转动,摇杆34在随动器33的作用下发生了摆动。摇杆34摆动即夹具组件摆动,两相对的夹具组件摆动可相对夹紧输电线或相对张开。
24.夹具35相对的一面设有六个用于漏碎冰的缺口351,两夹具35背向的一面设有两个用于出冰的退冰口352,退冰口352的尺寸大于缺口351的尺寸,使碎冰顺利地从退冰口352掉出,有效地避免碎冰堵塞。夹具35的端部设有倾斜的刀口353,刀口353可有效的减少夹具35前进方向的阻力。夹具35的后边缘和侧边不可做成相互垂直的,由于夹具35的后边缘离摇杆34的摆动点最接近,所以两夹具35后边缘之间的距离小。如果夹具35的后边缘和侧边做成相互垂直的,会使两夹具35相对合拢时相互干预。夹具35的后边缘和侧边不做成相互垂直的利于夹冰机构3放置于输电线上和脱开输电线。
25.铲碾机构2包括铲碾驱动电机20和两铲碾组件。铲碾驱动电机20通过第一电机支架201安装于安装板1。铲碾驱动电机20通过丝杆传动组件驱动两铲碾组件相向靠近或背向远离。安装板1设有用于安装丝杆传动组件的第一端盖11和第二端盖12。丝杆传动组件包括双向丝杆24、第一丝杆螺母26和第二丝杆螺母。双向丝杆24可转动的设于第一端盖11和第二端盖12之间,第一丝杆螺母26和第二丝杆螺母均和双向丝杆24螺纹配合。第一丝杆螺母26和第二丝杆螺母内的螺纹螺旋方向相反,以使双向丝杆24向一侧转动时第一丝杆螺母26和第二丝杆螺母相对靠近,反转时,第一丝杆螺母26和第二丝杆螺母相对远离。在其他实施方式中,第一丝杆螺母26和第二丝杆螺母内的螺纹螺旋方向相同,双向丝杆24具有螺纹螺旋方向相反的两段,并且分别和第一丝杆螺母26、第二丝杆螺母配合。双向丝杆24通过第四齿轮61和第五齿轮62和铲碾驱动电机20传动连接。双向丝杆24为梯形丝杆,梯形丝杆具有自锁性,如果碾压轮22和铲刀23受到轴向力不会反作用于铲碾驱动电机20。
26.铲碾组件包括支架21,支架21设有容置孔213,由于碾压组件设有两个,所以支架21也设有两个,其中一个支架21的容置孔213和第一丝杆螺母26连接,另一个支架21的容置孔213和第二丝杆螺母连接。丝杆传动组件还包括导轨25,导轨25固定于第一端盖11和第二端盖12之间。支架21设有滑孔212,导轨25设于滑孔212内,导轨25和滑孔212之间设有导向衬套27,导向衬套27和滑孔212之间设有卡簧28。卡簧28用于防止导向衬套27和滑孔212之间相对移动,用于对导向衬套27限位。导轨25/第一端盖11/第二端盖12上设有限位开关,当两铲碾组件之间张开固定距离时,两铲碾组件触发限位开关,然后控制铲碾驱动电机20停止工作。
27.铲碾组件还包括碾压轮22和铲刀23,碾压轮22通过轮轴221和支架21可转动的连接。支架21中间设有用于放置碾压轮22的缺口部,缺口部上下两端均设有轴孔211,轮轴221的上下两端设于轴孔211内。轮轴221和轴孔211之间设有轴承。轮轴221下端部设有端盖223,端盖223位于支架21下方,并且端盖223的尺寸大于轴孔211的尺寸,以防止轮轴221相对于支架21轴向移动。铲刀23和支架21固定连接,铲刀23设有铲齿。碾压轮22设于铲刀23的后方。
28.作业时,铲碾驱动电机20带动双向丝杆24转动,双向丝杆24转动带动两支架21相对靠近或分离。
29.安装板1设有光槽传感器13,第二齿轮354/第三齿轮355设有挡光片3551,当第二齿轮354/第三齿轮355转动到使两夹冰组件之间张开距离最大时,挡光片3551遮挡光槽传感器13触发光槽传感器13将信号传输给输电线除冰机器人的控制器。安装板1设有驱动器4,驱动器4和夹冰驱动电机31、铲碾驱动电机20电连接,驱动器4和控制器电连接,控制器和限位开关电连接。
30.结合附图7,输电线除冰机器人开始除冰时,首先通过举升臂将除冰机构放下;然后检测输电线覆冰的厚度,若检测覆冰为厚冰,则开启夹冰机构3和铲碾机构2使铲碾组件靠近合拢,若检测覆冰为薄冰,仅开启铲碾机构2使铲碾组件靠近合拢;然后控制输电线除冰机器人行进除冰。当检测到输电线除冰机器人遇到障碍物或除冰工作结束时,则使夹冰机构3停止工作并张开,使铲碾组件张开,然后通过举升臂将除冰机构举升;若检测到越障完毕时或除冰工作开始时,再一次循环上述步骤。
31.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1