一种新能源电力系统频率稳定快速分析方法
1.本发明涉及电力系统频率稳定分析领域,尤其涉及一种新能源电力系统频率稳定快速分析方法。
背景技术:
2.建设发展新能源电力系统是实现双碳目标的重要保障,是应对全球气候变化和履行国际承诺的重要措施,对推动我国能源结构调整、增加能源供应、保障能源安全具有重要意义。随着风电和光伏等新能源主动参与电力系统频率的调整,新能源电力系统中包含风电、光伏、火电机组和水电机组等多类型典型元素。水电机组调速器和原动机构成的原动系统出现负阻尼,在水电占比较高区域引发频率振荡,对系统频率稳定造成影响。以变流器为接口的新能源暂态过程中存在多时间尺度交织、离散事件,连续过程中存在混合、控制策略主导等特征,使得模型高阶分析困难,主导极点难以分辨。
3.现有考虑新能源参与调频的系统频率响应模型,通常对新能源调频环节进行简化和等值,以此来减小模型维数,提升计算效率。新能源集中式和分布式并举的建设趋势,导致了新能源电力系统中存在多种不同频率响应动态特性的调频资源,运用传统等值方式带来的模型误差不容忽视。
4.新能源主动频率控制是提升大功率缺额下系统频率稳定性的重要途径,现有的研究未涉及到含多种调频资源的新能源电力系统频率稳定分析方法,鲜有研究考虑到不同调频资源动态特性的差异,如何实现新能源电力系统频率稳定的快速分析是有待解决的问题。
技术实现要素:
5.为了解决上述问题,本发明提供了一种能够有效地判断新能源电力系统频率稳定和分析频率动态变化的新能源电力系统频率稳定快速分析方法。
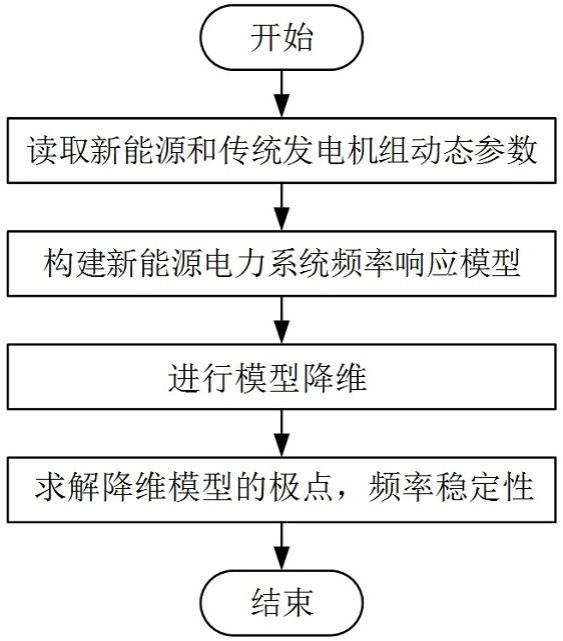
6.为了达到上述目的,本发明是通过以下技术方案来实现的:一种新能源电力系统频率稳定快速分析方法,包括以下步骤:步骤1:建立包括传统发电机组频率响应环节、风电场频率响应环节和光伏电站频率响应环节的多类型调频资源的新能源电力系统频率响应模型;步骤2:对步骤1中建立的新能源电力系统频率响应模型进行模型降维,得到低阶的新能源电力系统频率响应模型;步骤3:根据低阶的新能源电力系统频率响应模型,对频率稳定性进行分析。
7.本发明的进一步改进在于:步骤1中建立传统发电机组频率响应环节包括获取新能源电力系统中传统发电机组类型和对应频率响应参数,其中,传统发电机组类型至少包含火电机组和水电机组中的一种。
8.本发明的进一步改进在于:步骤1中,风电场频率响应环节采用综合惯性控制,传递函数满足以下公式:
式中:为风电场的有功变化量;为风电场的角频率变化量;为风电场虚拟惯性系数;为风电场下垂系数;为风电场功率控制系统的调频控制指令下发至逆变器的所需时间;为风电场逆变器的执行时间;s为复频域;光伏电站频率响应环节采用下垂控制,传递函数满足以下公式:式中:为光伏电站的有功变化量;为光伏电站的角频率变化量;为光伏电站调差系数;为光伏电站功率控制系统的调频控制指令下发至逆变器的所需时间;为光伏电站逆变器执行的所需时间。
9.本发明的进一步改进在于:所述步骤1中建立包含多类型调频资源的新能源电力系统频率响应模型的具体步骤为:传统发电机组频率响应环节、风电场频率响应环节和光伏电站频率响应环节乘以各发电单元占所有电源出力的比例系数,将所有调频资源的频率响应环节并联,作为新能源电力系统模型的负反馈,构成新能源电力系统频率响应模型,新能源电力系统频率响应模型满足以下公式:式中:为新能源电力系统的角频率变化量;为新能源电力系统的有功变化量;h为发电机的惯性时间常数;d为系统阻尼系数。
10.本发明的进一步改进在于:所述步骤2的具体步骤如下:步骤2.1,将步骤1所建立的新能源电力系统频率响应模型转化为状态空间方程,满足以下公式:满足以下公式:式中:为间n维状态向量,为n维状态向量的微分,为q维控制输入向量,为p维输出向量,a为系统矩阵,b为输入矩阵,c为输出矩阵,d1为直传矩阵;步骤2.2,计算新能源电力系统的可控格兰姆矩阵p和可观格兰姆矩阵q,表达式为:为:式中:为系统矩阵的转置,为输入矩阵的转置,为输出矩阵的转置;
步骤2.3,对可控格兰姆矩阵p和可观格兰姆矩阵q进行cholesky分解,表达式为:步骤2.3,对可控格兰姆矩阵p和可观格兰姆矩阵q进行cholesky分解,表达式为:式中:表示可控格兰姆矩阵p的cholesky分解;表示可控格兰姆矩阵p的cholesky分解的转置;表示可观格兰姆矩阵q的cholesky分解;表示可观格兰姆矩阵q的cholesky分解的转置;步骤2.4,对进行奇异值分解:式中:u是酉矩阵;σ是半正定对角矩阵;是不同阶酉矩阵;步骤2.5,计算平衡变化矩阵:步骤2.5,计算平衡变化矩阵:式中:是可控格兰姆矩阵p的cholesky分解后的平衡变化矩阵;是可观格兰姆矩阵q的cholesky分解后的平衡变化矩阵;步骤2.6,对状态空间矩阵进行平衡变换:式中:表示平衡变换后的系统矩阵,表示平衡变换后的输入矩阵,表示平衡变换后的输出矩阵,表示平衡变换后的直传矩阵,是的转置;步骤2.7,根据预期模型阶数,对平衡变换后的状态空间矩阵进行截断,计算模型降维后新能源电力系统的状态空间方程,将模型降维后新能源电力系统的状态空间方程转化为传递函数:式中:表示新能源电力系统状态空间方程的传递函数;,,分别是传递函数分子0阶,m-1阶和m-2阶的系数;
,
分别是传递函数分母0阶,n-1阶的系数,、分别是分子的m阶和分母的n阶。
11.本发明的进一步改进在于:步骤3具体步骤为:计算步骤2中低阶新能源电力系统频率响应模型的系统极点,表达式为:根据系统极点位置判断新能源电力系统频率的稳定性,当且仅当全部系统极点在
复平面左半平面时,新能源电力系统稳定;选取距离虚轴最近的共轭复根作为主导极点,通过主导极点在复平面位置及其阻尼比分析频率动态特性,虚部越大,阻尼比越小,新能源电力系统频率稳定性越弱。
12.本发明的有益效果是:本发明的方法通过建立包含传统发电机组、风电场和光伏电站等元素的新能源电力系统频率响应模型,对模型进行降维处理后求解计算系统极点,以此进行频率稳定分析,实现对新能源电力系统频率稳定性的快速评估。本发明充分考虑了新能源多调频资源的灵活控制潜质,可实现频率响应高维模型稳定性和动态特性的快速分析,对提高新能源电力系统运行稳定性具有深远意义。
附图说明
13.图1为本发明所提方法实现的流程图;图2为本发明实施例采用的新能源电力系统频率响应模型;图3为本发明中新能源电力系统频率响应模型时域仿真曲线。
具体实施方式
14.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
15.如图1所示,本发明中的方法具体步骤如下:步骤1:建立新能源电力系统频率响应模型,包括建立传统发电机组频率响应环节、风电场频率响应环节和光伏电站频率响应环节,建立包含多类型调频资源的新能源电力系统频率响应模型;步骤2:对步骤1中建立的新能源电力系统频率响应模型进行模型降维,得到低阶的新能源电力系统频率响应模型;步骤3:根据低阶的新能源电力系统频率响应模型,对频率稳定性进行分析。
16.步骤1中,建立传统发电机组频率响应环节,具体为:获取新能源电力系统中传统发电机组类型和对应频率响应参数,传统发电机组类型应包含火电机组和水电机组中的至少一种。
17.当传统发电机组为火电机组时,火电机组频率响应环节考虑调速器和原动机动态特性,传递函数满足以下公式:式中:为火电机组的有功变化量;为火电机组的角频率变化量;为高压缸稳态输出功率占汽轮机总输出功率的百分比;为中间再热蒸汽容积效应时间常数;为高压蒸汽容积时间常数;r为火电机组的调差系数;为火电机组调速器时间常数;s为复频域。
18.当传统发电机组为水电机组时,水电机组频率响应环节考虑调速器和原动机动态特性,传递函数满足以下公式:式中:为水电机组的有功变化量;为水电机组的角频率变化量;为水流惯性时间常数;为水电机组的调差系数;,和分别为调速器比例系数、积分系数和微分系数;为水电机组调速器时间常数。
19.步骤1中,风电场频率响应环节和光伏电站频率响应环节分别采用综合惯性控制和下垂控制,风电场频率响应环节传递函数满足以下公式:式中:为风电机组的有功变化量;为风电机组的角频率变化量;为风电场虚拟惯性系数;为风电场下垂系数;为风电场功率控制系统的调频控制指令下发至逆变器的所需时间;为风电场逆变器执行的所需时间。
20.光伏电站频率响应环节传递函数满足以下公式:式中:为光伏电站的有功变化量;为光伏电站的角频率变化量;为光伏电站调差系数;为光伏电站功率控制系统的调频控制指令下发至逆变器的所需时间;为光伏电站逆变器执行的所需时间。
21.传统发电机组频率响应环节、风电场频率响应环节和光伏电站频率响应环节乘以各发电单元占所有电源出力的比例系数,将所有调频资源的频率响应环节并联,作为新能源电力系统模型的负反馈,构成新能源电力系统频率响应模型。电力系统模型满足以下公式:式中:为新能源电力系统的角频率变化量;为新能源电力系统的有功变化量;h为发电机的惯性时间常数;d为系统阻尼系数。
22.本实施例选取含光伏电站、风电场、火电机组和水电机组的新能源电力系统作为对象。构建新能源电力系统频率响应模型,如图2所示。设置新能源电力系统有2个光伏电站,2个风电场,1台火电机组,1台水电机组。参数设置如下:光伏电站:第1个光伏电站调差系数=25,第1个光伏电站逆变器的执行时间
=2,第1个光伏电站功率控制系统的调频控制指令下发到逆变器的时间=0.05,第2个光伏电站调差系数=10,第2个光伏电站逆变器的执行时间=1,第2个光伏电站功率控制系统的调频控制指令下发至逆变器的所需时间=0.02;风电场:第1个风电场虚拟惯性=30,第1个风电场下垂系数=30,第1个风电场功率控制系统的调频控制指令下发到逆变器的时间=2,第1个风电场逆变器的执行时间=0.03,第2个风电场虚拟惯性=15,第2个风电场下垂系数=15,第2个风电场功率控制系统的调频控制指令下发到逆变器的时间=5,第2个风电场逆变器的执行时间=0.08;火电机组:高压缸稳态输出功率占汽轮机总输出功率的百分比=0.35,中间再热蒸汽容积效应时间常数=12,高压蒸汽容积时间常数=0.3,火电机组的调差系数r=0.03,火电机组调速器时间常数=0.2;水电机组:水流惯性时间常数=2.5,水电机组的调差系数=0.04,调速器比例=1,积分系数=2,微分系数=0.7,水电机组调速器时间常数=0.2;电力系统参数:不考虑新能源后的等效惯性为:发电机的惯性时间常数h=4.5,系统阻尼系数d=0.1;发电占比系数:=0.025,=0.025,=0.025,=0.025,=0.025,=0.025,=0.180,=0.720。
23.如图2所示,原新能源电力系统是一个线性定常控制系统,模型阶数为15阶,对模型进行降维,具体步骤如下:1) 将步骤1所建立的新能源电力系统频率响应模型转化为状态空间方程,满足以下公式:下公式:式中:为n维状态向量,表示n维状态向量的微分;为q维控制输入向量;为p维输出向量。a为系统矩阵,b为输入矩阵,c为输出矩阵,d1为直传矩阵。
24.2) 计算新能源电力系统的可控格兰姆矩阵p和可观格兰姆矩阵q:计算新能源电力系统的可控格兰姆矩阵p和可观格兰姆矩阵q:式中:为系统矩阵的转置,为输入矩阵的转置,为输出矩阵的转置;3) 对可控格兰姆矩阵p和可观格兰姆矩阵q进行cholesky分解:
式中:表示可控格兰姆矩阵p的cholesky分解;表示可控格兰姆矩阵p的cholesky分解的转置;表示可观格兰姆矩阵q的cholesky分解;表示可观格兰姆矩阵q的cholesky分解的转置;4) 对进行奇异值分解:式中:u是酉矩阵;σ是半正定对角矩阵;v是不同阶酉矩阵,表示不同阶酉矩阵的转置;5) 计算平衡变化矩阵:计算平衡变化矩阵:式中:是可观格兰姆矩阵q的cholesky分解后的平衡变化矩阵;是可控格兰姆矩阵p的cholesky分解后的平衡变化矩阵;6) 对状态空间矩阵进行平衡变换:式中:表示平衡变换后的系统矩阵,表示平衡变换后的输入矩阵,表示平衡变换后的输出矩阵,表示平衡变换后的直传矩阵,是的转置;7) 根据预期模型阶数,对平衡变换后的状态空间矩阵进行截断,计算降维后系统的状态空间方程,将降维后系统的状态空间方程转化为传递函数:式中:表示新能源电力系统状态空间方程的传递函数;,,分别是传递函数分子0阶,m-1阶和m-2阶的系数;
,
分别是传递函数分母0阶,n-1阶的系数,、分别是分子的m阶和分母的n阶。
25.取降维后模型阶数为5,10%的阶跃信号输入系统,得到系统频率动态响应曲线,如图3所示,系统频率变化和趋于稳态的过程与原新能源电力系统是完全一致的,说明降维后模型能与原新能源电力系统动态过程很好的近似。
26.步骤3进行频率稳定分析,对降维后的模型进行求解,计算极点,表达式为:
根据系统极点位置判断新能源电力系统频率的稳定性,当且仅当全部系统极点在复平面左半平面时,新能源电力系统稳定。选取距离虚轴最近的共轭复根作为主导极点,通过主导极点在复平面位置及其阻尼比大小分析频率动态特性,虚部越大,阻尼比越小,系统频率稳定性越弱。
27.计算得到降维后的新能源电力系统频率响应模型和原新能源电力系统频率响应模型的主导特征根分别为-0.1959
±
0.5610i和-0.1961
±
0.5614i,降维模型和全阶模型阻尼比分别为0.3296和0.3298,降维前后主导特征根基本一致,但是原新能源电力系统含有15个特征根,主导极点难以区分,而降维后的新能源电力系统频率响应模型仅有5个极点,易于分辨主导极点。进一步调整降维模型阶数,得到降阶系统的绝对误差如表1所示:随着模型阶数的增加,降阶模型和原新能源电力系统频率响应模型绝对误差显著降低。
28.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1