一种智能扫地机器人充电与通讯电路的制作方法
u1b、第二供电端、电容c5以及电阻r14;
10.所述运算放大器u1a和运算放大器u1b的型号均为lm358dr2,所述运算放大器 u1a的同相输入端与反向输入端之间接有电容c2;
11.所述运算放大器u1a的输出端与运算放大器u1b的同相输入端连接,所述运算放大器u1a的输出端与运算放大器u1b的同相输入端间有一连接点与充电座控制模块mcu连接。
12.在上述的结构中,所述运算放大器u1a的同相输入端串联有电阻r10,反相输入端串联有电阻r15,所述电阻r14的两端分别与电阻r10、电阻r15相连接;
13.所述运算放大器u1a的反相输入端和输出端之间接有电阻r18,所述电容c5的两端分别与运算放大器u1a的反相输入端和输出端相连接;所述运算放大器u1a的输出端和运算放大器u1b的同相输入端之间串联有电阻r11和电阻r20;所述运算放大器u1b的反向输入端和第二供电端间串联有电阻r21;所述运算放大器u1b的反相输入端与接地端间串联有电阻r22。
14.在上述的结构中,所述充电信号接收电路30包括触点t2、触点t3、稳压二极管d1、稳压二极管d2以及电阻r9;所述稳压二极管d1的正极接地,负极与电容 c1连接,稳压二极管d1与电容c1的连接点为第三公共端;所述电阻r9与触点t3 之间接有稳压二极管d2。
15.在上述的结构中,所述稳压二极管d1的型号为lesd5z3.3t1g;所述稳压二极管d2的型号为smbj24atvs;所述电容c1的两端接有电阻r7;所述第三公共端与触点t2之间接有电阻r9。
16.在上述的结构中,所述信号发射电路40包括三极管q4和三极管q5;所述三极管q4的基极与三极管q5的集电极相连接;所述三极管q4的发射极与三极管q5的基极相连接。
17.在上述的结构中,所述所述三极管q4的型号为ss8050;所述三极管q5的型号为s8050;所述三极管q4的集电极与电阻r12和电阻r13串联连接;所述三极管 q4的发射极与三极管q5的发射极之间接有电阻r19;所述三极管q4的基极与扫地机器人控制模块mcu之间串联有电阻r16;所述三极管q5的发射极和扫地机器人控制模块mcu之间串联有电阻r17。
18.在上述结构中所述充电座控制模块mcu的型号为hc32f460petb。
19.在上述结构中所述扫地机器人控制模块mcu的型号为hc32f460petb。
20.本实用新型的有益效果是:减少了机器的电路结构,节省机器的空间,在仅需要较少的电路结构下实现了将充电和通讯功能合二为一,降低制造成本。
附图说明
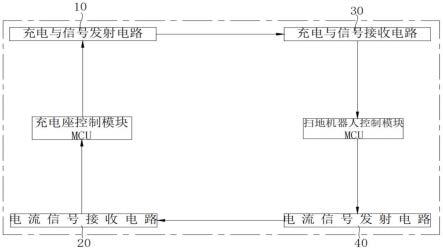
21.图1为本实用新型的一种智能扫地机器人充电与通讯电路的结构示意图。
22.图2为本实用新型的一种智能扫地机器人充电与通讯电路的充电与信号发射电路原理图。
23.图3为本实用新型的一种智能扫地机器人充电与通讯电路的电流信号接收电路原理图。
24.图4为本实用新型的一种智能扫地机器人充电与通讯电路的充电信号接收电路原理图。
25.图5为本实用新型的一种智能扫地机器人充电与通讯电路的信号发射电路原理图。
具体实施方式
26.下面结合附图和实施例对本实用新型进一步说明。
27.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本实用新型创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
28.参照图1所示,本实用新型专利揭示了一种智能扫地机器人充电与通讯电路,具体的,该电路包括充电与信号发射电路10、电流信号接收电路20、充电信号接收电路30、信号发射电路40、充电座控制模块mcu以及扫地机器人控制模块mcu;所述充电与信号发射电路10、电流信号接收电路20与充电座控制模块mcu为电性连接,充电信号接收电路30、信号发射电路40与扫地机器人控制模块mcu为电性连接;所述充电与信号发射电路10和充电与信号接收电路30之间由电源线连接,信号发射电路40和电流信号接收电路20之间由电源线连接。
29.参照图2和图3所示,所述信号发射电路10、电流信号接收电路20由mos管 q1、触点t1、触点t4以及电阻r14组成充电回路,充电和信号发送由充电座控制模块mcu控制三极管q2后再控制三极管q1,从而实现充电座对扫地机器人的发送信息。
30.所述运算放大器u1a和运算放大器u1b采集到电阻r14两端的电信号并放大所采集到的电信号后传递给充电座控制模块mcu,充电座对机器发送信息电路实现,充电和信号发送由充电座控制模块mcu控制q2再控制q1。
31.在上述的结构中,所述所述mos管q1的型号为emb12p03v,所述mos管q1为 p沟道mos管,在上述的结构中,所述mos管q1的型号为emb12p03v,所述mos管 q1为p沟道mos管,且所述mos管连接在第一供电端与触点t1之间;
32.在上述的结构中,所述运算放大器u1a型号为lm358dr2,运算放大器u1a的同相输入端连接电阻r10,反相输入端连接电阻r15,电阻r14的两端分别与电阻r10 和电阻r15相连接,所述运算放大器u1a的输出端与运算放大器u1b的同相输入端连接。
33.参照图4和图5所示,所述充电信号接收电路30、信号发射电路40中充电座的电能通过触点t2、触点t3输入,充电座发送的信号经过触点t2、电阻r9、电阻 r7、触点t3、电容c1、稳压二极管d1、稳压二极管d2形成回路,扫地机器人控制模块mcu直接采集电阻r7两端的电信号即可接收到充电座发送的信息;
34.在上述的结构中,触点t2与电阻r9相连接;触点t3与稳压二极管d2和电阻 r9串联连接,电阻r7接在电容c1两端,且电阻r7与电阻r9连接,稳压二极管 d1的阳极接地,所述电容c1一端接地,一端与稳压二极管d1的阴极连接。所述稳压二极管d1与电容c1的连接点为第三公共端,所述电阻r9通过第三公共端与扫地机器人控制模块mcu相连接。
35.在上述的结构中,所述三极管q4的集电极连接电阻r13、电阻r12,三极管q4 的发射极与三极管q5的基极连接,三极管q5的集电极与控制模块muc连接,所述三极管q5与扫地机器人控制模块mcu之间设有电阻r16。
36.在上述结构中,所述充电座控制模块mcu的型号为hc32f460petb。
37.在上述结构中,所述扫地机器人控制模块mcu的型号为hc32f460petb。
38.以上是对本实用新型的较佳实施进行了具体说明,但本实用新型创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1