一种输电线路巡检机器人激光除异物装置的制作方法
1.本实用新型涉及自动化领域,特别是涉及一种输电线路巡检机器人激光除异物装置。
背景技术:
2.架空输电线路长期裸露在外面,导线或杆塔有时候会缠绕上从地面因风吹起来的物体或者断落的风筝等,有可能造成输电线路相间放电者对地和树木放电,引起跳闸事件,危害输电线路的安全稳定运行。而最初往往采用人工除去异物的方式,对于临近高压铁塔的异物,工作人员通过爬上铁塔,使用绝缘杆或定做的绝缘清除杆一类的工具将其取下,而对于远离铁塔的异物,则需要动用登高车、工程车等专业设备。然而人工除异物缺点存在一定的缺点,异物所处的位置环境多样,比如树木遮挡或异物下方不通公路,车辆设备根本无法抵达,或者线路离地太高,登高车达不到需要的高度等,这些情况下,只能通过滑梯、吊篮等工具将作业人员挂在高压线上滑行到异物所在位置将之取下,或者动用直升飞机清除异物。这些方式不仅成本高、耗时长,而且对人员和设备的要求极高,还具有极大危险性,很有可能对工作人员造成人身伤害,酿成重大生产责任事故。
3.激光的应用也越来越广泛,可以进行非接触式的切割,但是有时候由于地形和天气的限制,激光发射装置只能远距离架设,导致精度不够以及能量会消散;现场激光除异物时,在现场,将激光发射器安装在电动云台上。使用手持控制器输出控制指令,手持控制器与主机无线通信,遥控激光除异物装置工作。清除异物时,遥控电动云台转动,调整激光发射器的指向,全息瞄准镜瞄准目标异物,控制器将全息瞄准镜显示的瞄准图像在显示屏上显示出来,便于工作人员查看瞄准情况,工作人员根据瞄准情况调整电动云台转动使得激光发射器对准目标异物,然后控制激光发射器将激光发射到目标异物上,将目标异物灼烧熔断。然而在现场激光除异物的时候由于地形和天气的限制,激光发射装置只能远距离架设,导致精度不够以及能量会消散。
4.例如,一种在中国专利文献上公开的“一种架空输电线路异物清除方法”,其公告号cn105390980b,由架空输电线路异物清除装置和辅助工具实施,包括安装吊装滑轮、安装辅助绳索、架空输电线路异物清除装置吊装上线、架空输电线路异物清除装置牵引就位、异物清除、完成关电、撤场等步骤,方法的原理是利用烧红的电阻丝对输电线路上的异物进行热切割和清除,无需线路停电,能够对输电线上的各种异物进行干净、有效、彻底的清除,清除异物效率高、效果好;操作方便、省时省力、提高工效。然而该方法仍需要手动对输电线上的异物进行清除,同时很难做到清除被遮挡处的异物。
技术实现要素:
5.本实用新型针对现阶段人工清除输电线异物成本高、难度大,固定激光云台清除输电线异物对天气、地形要求高的问题;提供了一种输电线路巡检机器人激光除异物装置;通过输电线巡检装置拍摄输电线确认异物位置,同时通过后台控制激光发射器发射激光清
除异物;无明火,不会造成火灾等隐患,且可随着输电线移动,无视觉盲区,能够精准的清除输电线的异物;通过在平行于输电线斜板上设置的太阳能板为巡检机器人充电,保证装置正常运行。
6.本实用新型的上述技术问题主要是通过下述技术方案得以解决的:
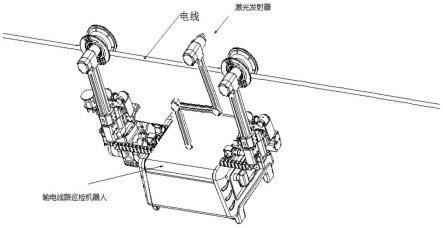
7.一种输电线路巡检机器人激光除异物装置,包括巡检装置、折叠杆、激光发射器、滑轮和外壳;所述巡检装置设置在外壳内部;所述巡检装置包括依次与中枢模块连接的全息瞄准镜、供电模块、控制模块和无线模块;所述激光发射器设置在折叠杆一端;所述折叠杆固定在外壳顶部;所述滑轮通过支撑柱固定在外壳侧面。通过输电线巡检装置拍摄输电线确认异物位置,同时通过后台控制激光发射器发射激光清除异物;无明火,不会造成火灾等隐患,且可随着输电线移动,无视觉盲区,能够精准的清除输电线的异物。
8.作为优选,所述外壳包括顶板,底板,侧板和斜板;所述斜板设置在相对的两面侧板顶部。平行输电线设置的两侧斜板可以贴合放置太阳能板,而平行于输电线方向倾斜放置太阳能板能够保证不被遮挡的始终接收到太阳光。
9.作为优选,所述折叠杆包括依次连接的第一支撑杆,第二支撑杆和第三支撑杆;所述第一支撑杆第一端固定在外壳顶板上;所述第一支撑杆的第二端和第二支撑杆第一端间设置第一轮轴连接;所述第二支撑杆第二端和第三支撑杆的第一端间设置第二轮轴连接;所述第三支撑杆第二端与激光发射器固定。支撑杆内部连接有电线,通过巡检装置的控制模块控制,能够操控支撑杆的活动,从而带动激光发射器发射激光,并清除异物。
10.作为优选,所述第一支撑杆、第二支撑杆和第三支撑杆沿轮轴凹槽方向转动,支撑杆能够按照轮轴的方向滑动,选择激光射出的高度和方向,通过控制模块可以任意转动支撑杆的方向,方便激光发射器对准输电线上的异物。
11.作为优选,所述供电模块包括太阳能板和蓄电池;所述太阳能板贴合设置在斜板上,太阳能板为蓄电池供电。
12.作为优选,所述斜板平行于输电线设置,存在两块太阳能板,而太阳能板斜着平行设置在外壳外部,无论太阳在哪个方向,均有一块斜板能够充分照射到阳光,因此保证充电状态稳定。
13.作为优选,所述中枢模块通过无线网络连通控制中心,通过后台连通中枢模块,将摄像头拍摄到的信息传递至后台,通过后台判断是否存在异物,若存在则通过后台操控中枢模块控制控制模块来清除异物。
14.本实用新型的有益效果是:
15.1.可远程操控。可以利用后台系统对输电线路巡检机器人进行操控,到达指定位置,开启激光发射装置来除异物,实现远程操控激光除异物装置。与传统的输电线路除异物方式相比,避免了必须多人到达现场的情况,只需附近的巡视人员将漂浮物捡走即可,节省了人力成本;
16.2.缩减时间成本。由于可以远程操控,发现漂浮物之后,在后台可立即组织进行清除工作。避免了人员召集、工器具领用、去往现场路上等时间上的浪费,可实现早发现、早清除,维护输电线路的稳定运行;
17.3.高精度。输电线路巡检机器人可以近距离对异物进行切割,切割的精度大大提高,避免导线的损伤;
18.4.避免能量的消散。由于可以近距离操作,激光能量消散少,因此所需功率也相应可以减少,激光发射器的尺寸可适当减小。
附图说明
19.图1为本实用新型完整结构图;
20.图2为巡检装置外壳结构;
21.图3为内部模块连接图。
具体实施方式
22.应理解,实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
23.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
24.一种输电线路巡检机器人激光除异物装置,包括巡检装置、折叠杆、激光发射器、滑轮和外壳;巡检装置设置在外壳内部,通过外壳上的开口容纳巡检装置延伸出的导线等部分,可以通过巡检装置内部的控制模块控制外部滑轮、折叠杆、激光发射器等工作运行。其中,滑轮通过固定杆固定在输电线上,可以沿着输电线前后移动。激光发射器固定在折叠杆顶部,通过折叠杆的活动来移动激光发射器,而折叠杆可以通过转轴移动。在未作业时,可将折叠杆收起,避免发射器损坏。当需要进行激光除异物的时候,将折叠杆伸展,进行激光除异物。
25.太阳能板为供电模块的主要充电装置,它设置在外壳的斜板上,斜板平行于输电线方向设置,侧板中包括相对设置的两块方形板和两块六边形版,斜板底部为方形板,而斜板侧面则为六边形板,几块板贴合。当装置在输电线上滑动时,阳光的方向会随着一天中的不同时刻变换方向,同时输电线和顶部的多种装置也会落下阴影挡住太阳能板,因此斜向设置太阳能板,同时将太阳能板平行于输电线方向设置,一是能够保证在一天中的任何时刻,装置本身的阴影都不会将两块太阳能板同时遮挡,保证充电状态,二是在太阳直射或斜射均能够照射到太阳能板,斜板的斜向设置保证一天内的所有时刻均能够接收到太阳的照射。
26.在装置运行时,装置沿着输电线滑动,中枢模块将摄像头拍摄到接的实时图片画面传递至后台,工作人员通过观察即可判断前方输电线上是否存在异物。而当发现异物时,后台传输控制指令,通过无线网络将控制信号传递至装置,装置将折叠杆展开,将激光发射器的端口对准异物所在位置,并发射激光。激光清除异物则完成了移动过程中的异物清除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1