基于普通电动三轮车的农用机器人动力供给电源装置的制作方法
1.本实用新型涉及农业生存技术领域,具体地说,涉及基于普通电动三轮车的农用机器人动力供给电源装置。
背景技术:
2.目前,我国的果园面积已达12276.68千公顷,仅陕西地区的果园就有1134.16千公顷,对于像猕猴桃、苹果这样的果园,到了授粉、采摘季节都需要大量的人力投入,然而,我国农村能用的劳力却在每年减少,因此开发一种能实现“授粉和采摘的机器人”就显得非常重要,考虑到“农业机器人”能够承受的成本问题,用现有普通电动三轮车作为“授粉采摘机器人”平台车辆将是一个好的选择。
3.要进行“采摘”果实的机器人,是一个复杂的机电一体化系统,有多种耗电大的直流电机、舵机、步进电机、摄像头和补光照明等部件,在处理器的控制下农用机器人要做复杂的机械动作,因此,整个机器人系统的耗电是很大的(至少大于200w),而这个电源如果用电动车上的蓄电池,将会对原车的动力系统有较大影响。
4.为此必须设计专用的动力供给电源和选择好的锂电池(包括高效充电器),保证“农用机器人”连续工作8小时以上,因此提出基于普通电动三轮车的农用机器人动力供给电源装置。
技术实现要素:
5.本实用新型的目的在于提供基于普通电动三轮车的农用机器人动力供给电源装置,以解决上述背景技术中提出的问题。
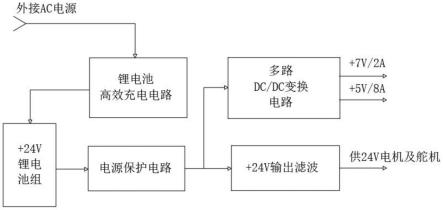
6.为实现上述目的,本实用新型提供基于普通电动三轮车的农用机器人动力供给电源装置,包括动力供给电源系统,所述动力供给电源系统包括电源保护电路、多路dc/dc变换电路,+24v输出电路、锂电池高效充电电路和+24v锂电池组,所述锂电池高效充电电路接外界ac电源,所述锂电池高效充电电路接所述+24v锂电池组,所述+24v锂电池组接所述电源保护电路,所述电源保护电路接所述多路dc/dc变换电路和所述+24v输出电路。
7.作为本技术方案的进一步改进,所述电源保护电路包括mos管1v1,所述mos管1v1 的d极接电阻1r1、二极管1v2、电容1c1并接24v锂电池,所述电容1c1接二极管1v4;
8.所述mos管1v1的g极接所述电阻1r1的另一端并接比较器1u1,所述比较器1u1接所述二极管1v2另一端并接电阻1r2,所述比较器1u1接地;
9.所述电阻1r2接二极管1v3并接所述比较器1u1另一端,所述二极管1v3接地;
10.所述mos管1v1的s极接电阻1r3、电容1c2,所述电阻1r3接电阻1r4并接所述二极管1v4另一端和所述比较器1u1另一端,所述电阻1r4、电容1c2接地。
11.作为本技术方案的进一步改进,所述+24v输出电路包括电感器3l1、3l2、3l3,电容 3c1、3c2、3c3、3c4,其中,
12.所述电感器3l1一端接所述mos管1v1的s极,并接所述电容3c1,所述电感器3l1 另
ac电源,锂电池高效充电电路接+24v锂电池组,+24v锂电池组接电源保护电路,电源保护电路接多路dc/dc变换电路和+24v输出电路。
28.多路dc/dc变换电路根据农用机器人的供电情况,输出+5v/8a和+7v/2a的稳定电源,通过对多个hv2596、tps54560等器件的组合与匹配设计,可输出纹波小于80mv(p-p),具有短路、过压保护的稳定电源。
29.农用“授粉和采摘”机器人所用主电源为24v锂电池,首先24v锂电池在电源保护电路作用下,输出+24v直流电源为主要动力供电,并在“大电流dc/dc变换”下,输出+5v/8a、 +7v/2a的低纹波直流电源为机器人“主控电路”及部分“关节”驱动电路供电。
30.电源保护电路包括mos管1v1,mos管1v1的d极接电阻1r1、二极管1v2、电容1c1 并接24v锂电池,电容1c1接二极管1v4;
31.mos管1v1的g极接电阻1r1的另一端并接比较器1u1,比较器1u1接二极管1v2另一端并接电阻1r2,比较器1u1接地;
32.电阻1r2接二极管1v3并接比较器1u1另一端,二极管1v3接地;
33.mos管1v1的s极接电阻1r3、电容1c2,电阻1r3接电阻1r4并接二极管1v4另一端和比较器1u1另一端,电阻1r4、电容1c2接地。
34.电源保护电路的主要作用是,防止农用机器人的机械部分“卡死”或部分直流电机(或舵机)驱动器短路等故障导致“锂电池”损坏,在通常情况下,如果因“负载”失常,导致电流过大时,都会将供电电压拉低,在野外长时间运行的“机器人”对其电源的保护至关重要。
35.稳压管1v2为5v稳压管,按图极性的连接下,vcc约为19v连接于电压比较器1u1的电源端,电阻1r2为51kω分压电阻,一端连接vcc(19v),一端连接与5v稳压管1v3 的负极,按稳压管1v2、1r2及1v3的连接方式,vf为5v,电阻1r1选100kω,为比较器 1u1的上拉电阻,并接于mos管1v1的栅极;比较器1u1为开漏式电压比较器,其电源电压小于36v;mos管1v1为大功率n沟道mos管,漏极接于24v锂电输出端,源极为+24v 输出端(u24),输出+24v(u24)端除正常输出+24v外,并由电阻1r3、1r4分压,电阻 1r3取20kω,电阻1r4取7.8kω。在正常供电时(u24=24v),vx为6.7v大于vf(5v),比较器1u1输出高电平(vcc=19v),mos管1v1完全导通(输出u24=24v);当u24小于17.8v(负载有故障)时,vx小于vf,比较器1u1输出低电平(0v),mos管1v1完全截止,起到了锂电池的完全保护。当负载故障恢复正常时,mos管1v1立即正常供电。
36.为了确保在开机时的瞬间,mos管1v1能够导通,在mos管1v1的漏极与比较器1u1 的“+”端间串联1c1(1uf)与1v4(1n4148);当开机时,由于电容1c1的充电,使得 vx高于vf,mos管1v1马上导通,开机过后,电容1c1与二极管1v4将失去作用,后面 mos管1v1的工作将会变成常态保护状态。
37.+24v输出电路包括电感器3l1、3l2、3l3,电容3c1、3c2、3c3、3c4,其中,
38.电感器3l1一端接mos管1v1的s极,并接电容3c1,电感器3l1另一端接电容3c2、电感器3l2、3l3,电容3c1接电容3c3、3c4并接地,电容3c3接电容3c2、电感器3l3 的另一端,电容3c4接电感器3l2另一端。
39.由于主+24v的输出为直流电机、舵机等感性负载,除了对其有稳定的供电性能外,还必须消除因“电感负载”在pwm驱动脉冲的影响下,造成对电源线的反向干扰。
40.+24v输出电路为改进的lc混合π型滤波器结构,由于“农用机器人”的感性负载,其
工作频率在1khz~10khz之间,考虑到高次谐波影响,本滤波器的工作频率应设计在5 次谐波的范围。通过设计计算,电容3c1为0.22uf,电感器3l1为200uh/8a,电感器3l2 为150uh/8a,电容3c4为2.2uf,电容3c2为0.1uf,电容3c3为2.2uf,电感器3l3为 0.1mh/0.1a。
41.锂电池高效充电电路包括瞬态可变电流充电电路,其中,
42.开关稳压源接电阻4r1并接mos管4v1的d极,开关稳压源接单片机测控系统,单片机测控系统接电阻4r2,电阻4r2接三极管4v2;
43.mos管4v1的g极接电阻4r1另一端并接三极管4v2,三极管4v2接地;
44.mos管4v1的s极接+24v锂电池组并接电阻4r3,+24v锂电池组接电阻ri并接差分放大器,差分放大器接单片机测控系统,电阻ri、差分放大器接地,电阻4r3接电阻4r4 并接单片机测控系统,电阻4r4接地。
45.对于本机器人的连续工作时间要大于8小时,所选“锂电池”容量都比较大,因此对其充电也必须高效短时间完成,其中,“1”是输入220v交流的开关稳压源,输出vdd是充电主电源,设计参数为30v/10a,vcc是辅助内供电源,设计参数为+5v/0.5a;“2”是单片机测控系统,cpu具有pwm控制器、adc输入通道;“3”是高输入单电源供电的差分放大器,放大增益20倍;“4”是24v锂电池组,容量大于80安时。
46.mos管4v1为大功率n沟道mos管,输出电流大于100a,其漏极连接于主电源vdd,源极连接到“4”的正极,栅极连接于三极管4v2的集电极与电阻4r1(10k)的一端;三极管4v2是npn型驱动三级管,其基极与电阻4r2(1k)相串后接到“2”的pwm输出端,发射极接地;电阻4r3(30k)与电阻4r4(5.1k)组成测量电池“4”的分压电路,分压值ve 连接到“2”的一个adc输入端,ve的检测范围是0~3.48v,代表锂电池0~24v;电阻 ri是串接在锂电池
“‑”
极与地之间的充电电流取样电阻,由孟铜丝制作,内阻0.1ω,功率大于50w;电阻ri上的压降通过“3”放大,输出vix接到“2”的一个adc输入端。
47.该充电器是在pwm信号(占空比)正脉冲“tz”的控制下,通过改变电流大小的方式充电的,一开始充电电流较大(瞬态可达100a),并随充电时间的增加,睡态充电电流在逐渐减小,与传统的充电器相比,这种脉冲式可变电流的方式,不会伤害锂电池,而且,充电效率会更高,充电时间会更短。
48.充电过程的顺序是:
49.①
pwm输出高电平,vg为“零电平”关断mos管4v1;
50.②
测量ve的电压,来判断“4”是否存在,若不存在,关闭充电过程;
51.③
测量ve的电压,是否需要充电,若不需要,关闭充电过程;
52.④
启动pwm信号,使“tz”由宽到窄的逐渐循环,并对应测量ix充电电流对应的vix 值;
53.⑤
循环测量vix值、ve值,并判断“4”是否充够(充够时,ix会变小,ve会变大);
54.若判断“4”已充够,关闭充电过程。
55.+24v锂电池组的电池容量不低于80安时。
56.较高的电池容量有利于确保“农用机器人”的工作时间。
57.本实施例的基于普通电动三轮车的农用机器人动力供给电源装置,在具体使用时,机器人所用主电源为24v锂电池,首先24v锂电池在电源保护电路作用下,输出+24v直流电源为主要动力供电,并在“大电流dc/dc变换”下,输出低纹波直流电源为机器人“主控电
路”及部分“关节”驱动电路供电,其充电过程为pwm输出高电平,vg为“零电平”关断mos管4v1;测量ve的电压,来判断24v锂电池组是否存在,若不存在,关闭充电过程,若24v锂电池组存在则测量ve的电压,是否需要充电,若不需要,关闭充电过程;启动 pwm信号,使“tz”由宽到窄的逐渐循环,并对应测量ix充电电流对应的vix值,并循环测量vix值、ve值,并判断24v锂电池组是否充够,若判断24v锂电池组已充够,关闭充电过程。
58.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1