一种状态识别方法、装置和系统以及追踪类设备与流程
[0001]
本发明实施例涉及但不限于追踪技术,尤指一种状态识别方法、装置和系统以及追踪类设备。
背景技术:
[0002]
可穿戴设备即直接穿在身上,或是整合到用户的衣服或配件上的一种便携式设备。可穿戴设备不仅仅是一种硬件设备,更能够通过软件支持以及数据交互、云端交互来实现强大的功能。
[0003]
随着移动互联网的快速发展和人们生活质量的提高,基于全球定位系统(gps,global position system)定位、手机应用程序(app,application)和云端服务器的追踪类设备(也称为tracker)已经越来越广泛的应用于人们的生活中。通过在追踪类设备中加入客户识别模块(sim,subscriber identity module)卡和无线模块,追踪类设备即可访问无线网络,该类设备也越来越受到运营商的青睐。
[0004]
尽管大多数追踪类设备都具有追踪、定位、报警等功能,但若给婴幼儿佩戴,还是无法及时识别婴幼儿所处状态是否危险,无法及时发出报警信号,从而无法对婴幼儿起到很好的保护作用。
技术实现要素:
[0005]
本发明实施例提供了一种状态识别方法、装置和系统以及追踪类设备,能够对婴幼儿所处的状态进行识别。
[0006]
本发明实施例提供了一种状态识别方法,包括:
[0007]
云服务器接收到追踪类设备每隔预设时间上传的用户的第一数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0008]
云服务器根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态。
[0009]
本发明实施例提供了一种状态识别方法,包括:
[0010]
追踪类设备每隔预设时间采集用户的第一数据,将采集的用户的第一数据上传给云服务器;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0011]
追踪类设备根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0012]
本发明实施例提供了一种状态识别装置,包括处理器和计算机可读存储介质,所述计算机可读存储介质中存储有指令,当所述指令被所述处理器执行时,实现上述任一种状态识别方法。
[0013]
本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一种状态识别方法的步骤。
[0014]
本发明实施例提供了一种状态识别装置,包括:
[0015]
数据接收模块,用于接收到追踪类设备每隔预设时间上传的用户的第一数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0016]
状态识别模块,用于根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态。
[0017]
本发明实施例提供了一种追踪类设备,包括:
[0018]
数据上传模块,用于每隔预设时间采集用户的第一数据,将采集的用户的第一数据上传给云服务器;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0019]
状态报警模块,用于根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0020]
本发明实施例提供了一种状态识别系统,包括:
[0021]
云服务器,用于接收到追踪类设备每隔预设时间上传的用户的第一数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态;根据所述用户当前所处的第二状态向所述追踪类设备发送报警指令或向监护者的终端推送报警消息;
[0022]
追踪类设备,用于每隔预设时间采集用户的第一数据,将采集的用户的第一数据上传给云服务器;根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0023]
本发明实施例包括:云服务器接收到追踪类设备每隔预设时间上传的用户的数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;云服务器根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态。本发明实施例基于追踪类设备上报的用户的第一数据确定用户当前所处的第二状态,由于用户当前所处的第二状态均是根据婴幼儿有可能所处的状态进行设计,从而实现了对婴幼儿所处的状态进行识别。
[0024]
本发明实施例的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例而了解。本发明实施例的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
[0025]
附图用来提供对本发明实施例技术方案的进一步理解,并且构成说明书的一部分,与本发明实施例的实施例一起用于解释本发明实施例的技术方案,并不构成对本发明实施例技术方案的限制。
[0026]
图1为本发明实施例的系统架构示意图;
[0027]
图2为本发明一个实施例提出的状态识别方法的流程图;
[0028]
图3为本发明另一个实施例提出的状态识别方法的流程图;
[0029]
图4为本发明实施例的实例1中tracker处于安全模式下的一次用户的数据搜集过程的流程图;
[0030]
图5为本发明实施例的实例2中tracker处于警戒模式下一次用户所处的第二状态的识别和报警过程的流程图;
[0031]
图6为本发明另一个实施例提出的状态识别装置的结构组成示意图;
[0032]
图7为本发明另一个实施例提出的追踪类设备的结构组成示意图。
具体实施方式
[0033]
下文中将结合附图对本发明实施例进行详细说明。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互任意组合。
[0034]
在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行。并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
[0035]
在介绍本发明实施例的状态识别方法之前,首先介绍本发明实施例的系统架构,如图1所示,本发明实施例采用的系统架构包括:云服务器101、监护者的终端102和追踪类设备103(例如,追踪类可穿戴设备,也称为tracker)。
[0036]
其中,追踪类设备103是指具有gps模块,可定位用户位置的可穿戴设备。同时,追踪类设备104还可以包括以下模块中的一个或多个:蜂鸣器、拍照模块(例如摄像头)、录音模块(例如麦克风)、sim卡、无线模块。
[0037]
其中,蜂鸣器可实现蜂鸣报警功能,拍照模块用于实现拍照功能,录音模块用于实现录音功能,sim卡可实现拨打电话功能,无线模块可实现上网功能。
[0038]
追踪类设备103可以通过无线模块与云服务器101和终端102通信,不同的追踪类设备103之间也可以通过无线模块进行相互通信;追踪类设备103可以接收云服务器101的指令,将自身的相关信息(例如采集的用户的数据)发送给云服务器101,向终端102推送消息,拨打电话等;
[0039]
终端102可以从云服务器101获取追踪类设备103的相关信息,并控制追踪类设备103(例如,设置追踪类设备103的模式等),
[0040]
云服务器101可以向终端102推送消息。
[0041]
参见图2,本发明一个实施例提出了一种状态识别方法,包括:
[0042]
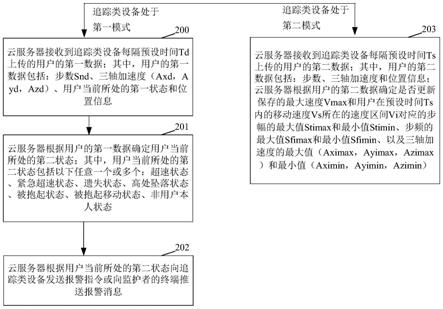
步骤200、云服务器接收到追踪类设备每隔预设时间td上传的用户的第一数据;其中,用户的第一数据包括:步数snd、三轴加速度(axd,ayd,azd)、用户当前所处的第一状态和位置信息。
[0043]
在本发明实施例中,追踪类设备是指具有gps模块,可定位用户位置的可穿戴设备。
[0044]
在本发明实施例中,步数snd可以是计步器上的当前计数,计步器可以每隔预设时间td清零,也可以不清零,一直累加,当计步器不清零时,上报的步数snd也可以是计步器上的当前计数减去上一个预设时间td采集到的计步器的计数。
[0045]
在本发明实施例中,三轴加速度和用户当前所处的第一状态均由加速度传感器(g-sensor)获得,用户当前所处的第一状态可以是跌落状态或静止状态。
[0046]
步骤201、云服务器根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态。
[0047]
在一个示例性实例中,云服务器根据用户的第一数据确定用户当前所处的第二状态包括:
[0048]
云服务器根据用户的第一数据计算用户在预设时间td内的移动速度vd、步幅std和步频sfd;
[0049]
云服务器根据用户在预设时间td内的移动速度vd、步幅std、步频sfd、三轴加速度(axd,ayd,azd)和用户当前所处的第一状态中的一个或多个确定用户当前所处的第二状态。
[0050]
在一个示例性实例中,云服务器根据用户的第一数据计算用户在预设时间td内的移动速度vd、步幅std和步频sfd包括:
[0051]
云服务器根据用户的第一数据中的位置信息计算用户在预设时间td内的移动距离,根据用户在预设时间内的移动距离和预设时间td计算出用户在预设时间td内的移动速度vd;
[0052]
云服务器根据用户的第一数据中的步数和用户在预设时间td内的移动距离计算出用户在预设时间td内的步幅std;
[0053]
云服务器根据用户的第一数据中的步数和预设时间td计算出用户在预设时间td内的步频sfd。
[0054]
在一个示例性实例中,用户在预设时间td内的移动距离为本次采集的用户的位置信息和上一次采集的用户的位置信息对应的位置坐标的欧式距离。
[0055]
当然,也可以采用其他的方式计算用户在预设时间td内的移动距离,本发明实施例对用户在预设时间td内的移动距离的具体计算方式不作限定。
[0056]
在一个示例性实例中,用户在预设时间td内的移动速度vd为用户在预设时间td内的移动距离和预设时间td的比值。
[0057]
在一个示例性实例中,用户在预设时间td内的步幅std为用户在预设时间td内的移动距离和预设时间td内用户的步数的比值。
[0058]
在一个示例性实例中,用户在预设时间td内的步频sfd为预设时间td内用户和预设时间td之间的比值。
[0059]
其中,当计步器每隔预设时间td清零,或者,计步器不清零,但每次追踪类设备上报的步数为计步器上的当前计数减去上一个预设时间td采集到的计步器的计数时,预设时间td内用户的步数为追踪类设备上报的步数;当计步器不清零,且每次追踪类设备上报的步数为计步器上的当前计数时,预设时间td内用户的步数为追踪类设备本次上报的步数和上一次上报的步数之差。
[0060]
在一个示例性实例中,云服务器根据用户在预设时间td内的移动速度vd、步幅std、步频sfd、三轴加速度和用户当前所处的第一状态中的一个或多个确定用户当前所处的第二状态包括以下任意一个或多个:
[0061]
云服务器根据用户在预设时间td内的移动速度vd确定用户当前所处的第二状态是否为超速状态或紧急超速状态;
[0062]
云服务器根据用户的z轴加速度azd确定用户当前所处的第二状态是否为被抱起状态;
[0063]
云服务器根据用户当前所处的第一状态确定用户当前所处的第二状态是否为高处坠落状态;
[0064]
云服务器根据用户在预设时间td内的步幅std和步频sfd确定用户当前所处的第二状态是否为被抱起移动状态;
[0065]
云服务器根据用户在预设时间td内的步幅std、步频sfd和三轴加速度确定用户当前所处的第二状态是否为非用户本人状态;
[0066]
云服务器根据用户当前所处的第一状态确定用户当前所处的第二状态是否为遗失状态。
[0067]
在一个示例性实例中,云服务器根据用户在预设时间td内的移动速度vd确定用户当前所处的第二状态是否为超速状态或紧急超速状态包括以下任意一个或多个:
[0068]
当用户在预设时间td内的移动速度vd大于保存的最大速度vmax时,云服务器确定用户当前所处的第二状态为超速状态;
[0069]
当用户在预设时间td内的移动速度vd大于保存的极限速度vi时,云服务武器确定用户当前所处的第二状态为紧急超速状态。
[0070]
在一个示例性实例中,云服务器根据用户的z轴加速度azd确定用户当前所处的第二状态是否为被抱起状态包括:
[0071]
当用户的z轴加速度azd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的z轴加速度的最大值azimax,且未设置z轴向上加速度异常标志位fzu时,云服务器设置z轴向上加速度异常标志位fzu,确定用户当前所处的第二状态为被抱起状态。
[0072]
在一个示例性实例中,云服务器根据用户当前所处的第一状态确定用户当前所处的第二状态是否为高处坠落状态包括以下任意一个或多个:
[0073]
当用户当前所处的第一状态为跌落状态,且未设置跌落标志位fzd时,云服务器设置跌落标志位fzd;
[0074]
当用户当前所处的第一状态为跌落状态,且已设置跌落标志位fzd时,云服务器确定用户当前所处的第二状态为高处坠落状态,清空跌落标志位fzd。
[0075]
在一个示例性实例中,云服务器根据用户在预设时间td内的步幅std和步频sfd确定用户当前所处的第二状态是否为被抱起移动状态包括:
[0076]
当用户的z轴加速度azd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的z轴加速度的最大值azimax,且已设置z轴向上加速度异常标志位fzu;并且,用户在预设时间td内的步幅std大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步幅的最大值stimax或用户在预设时间td内的步频sfd小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步频的最小值sfimin时,云服务器确定用户当前所处的第二状态为被抱起移动状态,清空z轴向上加速度异常标志位fzu。
[0077]
在一个示例性实例中,云服务器根据用户在预设时间td内的步幅std、步频sfd和三轴加速度确定用户当前所处的第二状态是否为非用户本人状态包括:
[0078]
当满足以下三个或三个以上条件时,云服务器确定用户当前所处的第二状态为非用户本人状态:
[0079]
用户在预设时间td内的步幅std大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步幅的最大值stimax,或用户在预设时间td内的步幅std小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步幅的最小值stimin;
[0080]
用户在预设时间td内的步频sfd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步频的最大值sfimax,或用户在预设时间td内的步频sfd小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的步频的最小值sfimin;
[0081]
用户的x轴加速度axd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的x轴加速度的最大值aximax,或用户在预设时间td内的x轴加速度axd小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的x轴加速度的最小值aximin;
[0082]
用户的y轴加速度ayd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的y轴加速度的最大值ayimax,或用户在预设时间td内的y轴加速度ayd小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的y轴加速度的最小值ayimin;
[0083]
用户的z轴加速度azd大于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的z轴加速度的最大值azimax,或用户在预设时间td内的z轴加速度azd小于保存的用户在预设时间td内的移动速度vd所在的速度区间vi对应的z轴加速度的最小值azimin。
[0084]
在一个示例性实例中,云服务器根据用户当前所处的第一状态确定用户当前所处的第二状态是否为遗失状态包括:
[0085]
当用户当前所处的第一状态为静止状态时,云服务器确定用户当前所处的第二状态为遗失状态。
[0086]
在本发明另一个实施例中,步骤201之后,该方法还包括:
[0087]
步骤202、云服务器根据用户当前所处的第二状态向追踪类设备发送报警指令或向监护者的终端推送报警消息。
[0088]
在一个示例性实例中,云服务器根据用户当前所处的第二状态向追踪类设备发送报警指令或向监护者的终端推送报警消息包括以下任意一个或多个:
[0089]
当用户当前所处的第二状态为超速状态时,云服务器向追踪类设备发送超速报警指令;其中,超速报警指令中可以携带监护者的电话号码,也可以不携带监护者的电话号码;
[0090]
当用户当前所处的第二状态为紧急超速状态时,这种情况婴幼儿很可能在交通工具上,云服务器向追踪类设备发送紧急超速报警指令或向监护者的终端推送紧急超速报警消息;其中,紧急超速报警指令中可以携带监护者的电话号码,也可以不携带监护者的电话号码;紧急超速报警消息中可以携带紧急报警电话号码,也可以不携带紧急报警电话号码;监护者在终端上看到紧急超速报警消息时,可以选择是否拨打紧急报警电话号码;
[0091]
当用户当前所处的第二状态为被抱起状态时,云服务器向追踪类设备发送被抱起报警指令;
[0092]
当用户当前所处的第二状态为高处坠落状态时,云服务器向追踪类设备发送高处坠落报警指令或向监护者的终端推送高处坠落报警消息;其中,高处坠落报警指令中可以
携带监护者的电话号码,也可以不携带监护者的电话号码;高处坠落报警消息中可以携带紧急医疗电话号码,也可以不携带紧急医疗电话号码;监护者在终端上看到高处坠落报警消息时,可以选择是否拨打紧急医疗电话号码;
[0093]
当用户当前所处的第二状态为非用户本人状态时,云服务器向追踪类设备发送非用户本人报警指令或向监护者的终端推送非用户本人报警消息或遗失消息;其中,非用户本人报警指令可以携带监护者的电话号码,也可以不携带监护者的电话号码;非用户本人报警消息或遗失消息可以携带紧急报警电话号码,也可以不携带紧急报警电话号码;监护者在终端上看到非用户本人报警消息或遗失消息,可以选择是否拨打紧急报警电话号码;
[0094]
当用户当前所处的第二状态为被抱起移动状态时,云服务器向追踪类设备发送被抱起移动报警指令和/或向监护者的终端推送被抱起移动报警消息;其中,被抱起移动报警指令中可以携带监护者的电话号码,也可以不携带监护者的电话号码;被抱起移动报警消息可以携带紧急报警电话号码,也可以不携带紧急报警电话号码;监护者在终端上看到被抱起移动报警消息,可以选择是否拨打紧急报警电话号码;
[0095]
当用户当前所处的第二状态为遗失状态时,云服务器向追踪类设备发送遗失报警指令或向监护者的终端推送遗失报警消息;其中,遗失报警指令可以携带监护者的电话号码,也可以不携带监护者的电话号码;遗失报警消息可以携带紧急报警电话号码,也可以不携带紧急报警电话号码;监护者在终端上看到遗失报警消息,可以选择是否拨打紧急报警电话号码。
[0096]
在本发明一个实施例中,保存的最大速度vmax和用户在预设时间ts内的移动速度vs所在的速度区间vi对应的步幅的最大值stimax和最小值stimin、步频的最大值sfimax和最小值sfimin、以及三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin)可以预先设置并保存。
[0097]
在本发明另一个实施例中,当追踪类设备处于第一模式时,执行步骤200和步骤201,或者执行步骤200~步骤202;
[0098]
在本发明实施例中,第一模式可以是警戒模式,也可以是其他名称,本发明实施例对第一模式的具体名称不作限定。
[0099]
在本发明实施例中,可以在确定婴幼儿处于非监护环境中时,将追踪类设备的当前模式设置为第一模式。用户可以直接在追踪类设备上设置追踪类设备的当前模式,也可以通过监护者的终端设置追踪类设备的当前模式,每一次模式更新后,可穿戴设备将更新后的模式上传给云服务器。
[0100]
该方法还包括:
[0101]
步骤203、当追踪类设备处于第二模式时,云服务器接收到追踪类设备每隔预设时间ts上传的用户的第二数据;其中,用户的第二数据包括:步数、三轴加速度和位置信息;云服务器根据用户的第二数据确定是否更新保存的最大速度vmax和用户在预设时间ts内的移动速度vs所在的速度区间vi对应的步幅的最大值stimax和最小值stimin、步频的最大值sfimax和最小值sfimin、以及三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin)。
[0102]
在本发明实施例中,第二模式可以是安全模式,也可以是其他名称,本发明实施例对第二模式的具体名称不作限定。
[0103]
在本发明实施例中,可以在确定婴幼儿处于监护人监护下的安全环境中时,将当前模式设置为第二模式。用户可以直接在追踪类设备上设置追踪类设备的当前模式,也可以通过监护者的终端设置追踪类设备的当前模式,每一次模式更新后,可穿戴设备将更新后的模式上传给云服务器。
[0104]
在本发明实施例中,云服务器预先保存有每一个追踪类设备对应的最大速度vmax、极限速度vi、将0到速度极限vi平均划分得到的vn个速度区间中每一个速度区间vi对应的步幅sts的最大值stimax和最小值stimin、步频sfs的最大值sfimax和最小值sfimin、三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin),其中,i为1到n之间的整数,vn为速度区间的个数。
[0105]
其中,极限速度vi是指极限奔跑速度,默认值可设为10米每秒(m/s),也可由用户进行设置。
[0106]
在本发明实施例中,初始状态下,云服务器中保存的上述值均可以为0。
[0107]
在本发明实施例中,云服务器根据用户的第二数据确定是否更新保存的最大速度vmax和用户在预设时间ts内的移动速度vs所在的速度区间vi对应的步幅的最大值stimax和最小值stimin、步频的最大值sfimax和最小值sfimin、以及三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin)包括:
[0108]
云服务器根据用户的第二数据计算用户在预设时间ts内的移动速度vs、步幅sts和步频sfs;
[0109]
云服务器根据用户在预设时间ts内的移动速度vs确定是否更新云服务器中保存的最大速度vmax;
[0110]
云服务器确定用户在预设时间ts内的移动速度vs所在的速度区间vi,根据用户在预设时间ts内的步幅sts确定是否更新保存的确定出的速度区间vi对应的步幅的最大值stimax和最小值stimin;
[0111]
云服务器根据用户在预设时间ts内的步频sfs确定是否更新保存的确定出的速度区间vi对应的步频的最大值sfimax和最小值sfimin;
[0112]
云服务器根据用户的三轴加速度确定是否更新保存的确定出的速度区间vi对应的三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin)。
[0113]
在本发明实施例中,云服务器根据用户在预设时间ts内的移动速度vd确定是否更新云服务器中保存的最大速度vmax包括以下任意一个或多个:
[0114]
当用户在预设时间ts内的移动速度vs大于云服务器中保存的最大速度vmax时,云服务器将保存的最大速度vmax更新为用户在预设时间ts内的移动速度vs;
[0115]
当用户在预设时间ts内的移动速度vs小于或等于云服务器中保存的最大速度vmax时,云服务器保持保存的最大速度vmax不变。
[0116]
在本发明实施例中,云服务器根据用户在预设时间ts内的步幅sts确定是否更新保存的确定出的速度区间vi对应的步幅的最大值stimax和最小值stimin包括以下任意一个或多个:
[0117]
当用户在预设时间ts内的步幅sts大于保存的确定出的速度区间vi对应的步幅的最大值stimax时,云服务器将保存的确定出的速度区间vi对应的步幅的最大值stimax更新为用户在预设时间ts内的步幅sts;
[0118]
当用户在预设时间ts内的步幅sts小于保存的确定出的速度区间vi对应的步幅的最小值stimin时,云服务器将保存的确定出的速度区间vi对应的步幅的最小值stimin更新为用户在预设时间ts内的步幅sts;
[0119]
当用户在预设时间ts内的步幅sts大于或等于保存的确定出的速度区间vi对应的步幅的最小值stimin,且小于或等于保存的确定出的速度区间vi对应的步幅的最大值stimax时,云服务器保持保存的确定出的速度区间vi对应的步幅的最大值stimax和最小值stimin不变。
[0120]
在本发明实施例中,云服务器根据用户在预设时间ts内的步频sfs确定是否更新保存的确定出的速度区间vi对应的步频的最大值sfimax和最小值sfimin包括以下任意一个或多个:
[0121]
当用户在预设时间ts内的步频sfs大于保存的确定出的速度区间vi对应的步频的最大值sfimax时,云服务器将保存的确定出的速度区间vi对应的步频的最大值sfimax更新为用户在预设时间ts内的步频sfs;
[0122]
当用户在预设时间ts内的步频sfs小于保存的确定出的速度区间vi对应的步频的最小值sfimin时,将保存的确定出的速度区间vi对应的步频的最小值sfimin更新为用户在预设时间ts内的步频sfs;
[0123]
当用户在预设时间ts内的步频sfs大于或等于保存的确定出的速度区间vi对应的步频的最小值sfimin,且小于或等于保存的确定出的速度区间vi对应的步频的最大值sfimax时,云服务器保持保存的确定出的速度区间vi对应的步频的最大值sfimax和最小值sfimin不变。
[0124]
在本发明实施例中,云服务器根据用户的三轴加速度确定是否更新保存的确定出的速度区间vi对应的三轴加速度的最大值(aximax,ayimax,azimax)和最小值(aximin,ayimin,azimin)包括以下任意一个或多个:
[0125]
当用户在预设时间ts内的x轴加速度大于保存的确定出的速度区间vi对应的x轴加速度的最大值aximax时,云服务器将保存的确定出的速度区间vi对应的x轴加速度的最大值aximax更新为用户在预设时间ts内的x轴加速度;
[0126]
当用户在预设时间ts内的x轴加速度小于保存的确定出的速度区间vi对应的x轴加速度的最小值aximin时,云服务器将保存的确定出的速度区间vi对应的x轴加速度的最小值aximin更新为用户在预设时间ts内的x轴加速度;
[0127]
当用户在预设时间ts内的x轴加速度大于或等于保存的确定出的速度区间vi对应的x轴加速度的最小值aximin,且小于或等于保存的确定出的速度区间vi对应的x轴加速度的最大值aximax时,云服务器保持保存的确定出的速度区间vi对应的x轴加速度的最大值aximax和最小值aximin不变;
[0128]
当用户在预设时间ts内的y轴加速度大于保存的确定出的速度区间vi对应的y轴加速度的最大值ayimax时,云服务器将保存的确定出的速度区间vi对应的y轴加速度的最大值ayimax更新为用户在预设时间ts内的y轴加速度;
[0129]
当用户在预设时间ts内的y轴加速度小于保存的确定出的速度区间vi对应的y轴加速度的最小值ayimin时,云服务器将保存的确定出的速度区间vi对应的y轴加速度的最小值ayimin更新为用户在预设时间ts内的y轴加速度;
[0130]
当用户在预设时间ts内的y轴加速度大于或等于保存的确定出的速度区间vi对应的y轴加速度的最小值ayimin,且小于或等于保存的确定出的速度区间vi对应的y轴加速度的最大值ayimax时,云服务器保持保存的确定出的速度区间vi对应的y轴加速度的最大值ayimax和最小值ayimin不变;
[0131]
当用户在预设时间ts内的z轴加速度大于保存的确定出的速度区间vi对应的z轴加速度的最大值azimax时,云服务器将保存的确定出的速度区间vi对应的z轴加速度的最大值azimax更新为用户在预设时间ts内的z轴加速度;
[0132]
当用户在预设时间ts内的z轴加速度小于保存的确定出的速度区间vi对应的z轴加速度的最小值azimin时,云服务器将保存的确定出的速度区间vi对应的z轴加速度的最小值azimin更新为用户在预设时间ts内的z轴加速度;
[0133]
当用户在预设时间ts内的z轴加速度大于或等于保存的确定出的速度区间vi对应的z轴加速度的最小值azimin,且小于或等于保存的确定出的速度区间vi对应的z轴加速度的最大值azimax时,云服务器保持保存的确定出的速度区间vi对应的z轴加速度的最大值azimax和最小值azimin不变。
[0134]
本发明实施例基于追踪类设备上报的用户的第一数据确定用户当前所处的第二状态,由于用户当前所处的第二状态均是根据婴幼儿有可能所处的状态进行设计,从而实现了对婴幼儿所处的状态进行识别。
[0135]
参见图3,本发明另一个实施例提出了一种状态识别方法,包括:
[0136]
步骤300、追踪类设备每隔预设时间td采集用户的第一数据,将采集的用户的第一数据上传给云服务器;其中,用户的第一数据包括:步数snd、三轴加速度(axd,ayd,azd)、用户当前所处的第一状态和位置信息。
[0137]
在本发明实施例中,追踪类设备是指具有gps模块,可定位用户位置的可穿戴设备。
[0138]
在本发明实施例中,步数snd可以是计步器上的当前计数,计步器可以每隔预设时间td清零,也可以不清零,一直累加,当计步器不清零时,上报的步数snd也可以是计步器上的当前计数减去上一个预设时间td采集到的计步器的计数。
[0139]
在本发明实施例中,三轴加速度和用户当前所处的第一状态均由加速度传感器(g-sensor)获得,用户当前所处的第一状态可以是跌落状态或静止状态。
[0140]
在本发明另一个实施例中,步骤300之后,该方法还包括:
[0141]
步骤301、追踪类设备根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0142]
在一个示例性实例中,追踪类设备根据接收到的报警指令进行报警包括以下任意一个或多个:
[0143]
当接收到的报警指令为超速报警指令时,进行超速报警;例如,进行蜂鸣器报警;
[0144]
当接收到的报警指令为紧急超速报警指令时,进行紧急超速报警;例如,向监护者的终端推送紧急超速报警消息;或者拨打监护者的电话号码;或者触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;监护者在终端上看到紧急超速报警消息时,可以选择是否拨打紧急报警电话号码;
[0145]
当接收到的报警指令为被抱起报警指令时,进行被抱起报警;例如,触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;
[0146]
当接收到的报警指令为高处坠落报警指令时,进行高处坠落报警;例如,拨打监护者的电话号码,或者向监护者的终端推送高处坠落报警消息;监护者在终端上看到高处坠落报警消息时,可以选择是否拨打紧急医疗电话号码;
[0147]
当接收到的报警指令为非用户本人报警指令时,进行非用户本人报警;例如,进行蜂鸣器报警;或者触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;或者拨打监护者的电话号码;或者向监护者的终端推送非用户本人报警消息或遗失消息;监护者在终端上看到非用户本人报警消息或遗失消息,可以选择是否拨打紧急报警电话号码;
[0148]
当接收到的报警指令为被抱起移动报警指令时,进行被抱起移动报警;例如,进行蜂鸣器报警,并拨打监护者的电话号码;或进行蜂鸣器报警,并向监护者的终端推送被抱起移动报警消息;监护者在终端上看到被抱起移动报警消息,可以选择是否拨打紧急报警电话号码;
[0149]
当接收到的报警指令为遗失报警指令时,进行遗失报警;例如,拨打监护者的电话号码,或者向监护者的终端推送遗失报警消息;监护者在终端上看到遗失报警消息,可以选择是否拨打紧急报警电话号码。
[0150]
例如,当有不法分子试图抱起婴幼儿离开时,云服务器根据tracker上报的用户的数据首先会检测到z轴向上加速度异常,所以设置z轴向上加速度异常标志位fzu,下一周期会检测到步频或步幅异常,即可立即进行被抱起移动报警;再例如当云服务器收到tracker上报的用户当前所处的第一状态为跌落状态时,会设置跌落标志位fzd,如果下一周期再次收到用户当前所处的第一状态为跌落状态,说明婴幼儿正处于危险高处,tracker从婴幼儿身上掉落,或者婴幼儿直接从高处坠落,这都是很危险的状况,会及时进行高处坠落报警。
[0151]
当然,本发明实施例不仅仅局限于上述报警方式,其他的报警方式也在本发明实施例的保护范围内。
[0152]
在本发明另一个实施例中,当处于第一模式时,执行步骤300,或执行步骤300和步骤301;
[0153]
在本发明实施例中,第一模式可以是警戒模式,也可以是其他名称,本发明实施例对第一模式的具体名称不作限定。
[0154]
在本发明实施例中,可以在确定婴幼儿处于非监护环境中时,将追踪类设备的当前模式设置为第一模式。用户可以直接在追踪类设备上设置追踪类设备的当前模式,也可以通过监护者的终端设置追踪类设备的当前模式,每一次模式更新后,可穿戴设备将更新后的模式上传给云服务器。
[0155]
当处于第二模式时,该方法还包括:
[0156]
步骤302、追踪类设备每隔预设时间ts采集用户的第二数据,将采集的用户的第二数据上传给云服务器;其中,用户的第二数据包括:步数sns、三轴加速度(axs,ays,azs)和位置信息。
[0157]
下面列举两个实例分别说明tracker处于安全模式下的一次用户的数据搜集过程
和tracker处于警戒模式下一次用户所处的第二状态的识别和报警过程,所列举的例子仅仅是为了方便说明,不用于限定本发明实施例的保护范围。
[0158]
实例1
[0159]
本实例中描述tracker处于安全模式下的一次用户的数据搜集过程,参见图4,包括:
[0160]
步骤401、将tracker设置为安全模式;
[0161]
步骤402、tracker每隔一个周期ts(即上述预设时间),将用户的步数sns、三轴加速度值(axs、ays和azs)和位置信息上传到云服务器;
[0162]
步骤403、云服务器计算出本次周期的移动速度vs、步幅sts和步频sfs;
[0163]
步骤404、云服务器判断本次周期的移动速度vs是否大于保存的最大速度vmax;
[0164]
步骤405、当vs大于vmax时,云服务器将保存的vmax更新为vs;当vs小于或等于vmax时,云服务器保持保存的vmax不变;
[0165]
步骤406、云服务器确定vs所在的速度区间vi,当sts大于保存的速度区间vi对应的stimax时,云服务器将保存的速度区间vi对应的stimax更新为sts;当sts小于保存的速度区间vi对应的stimin时,云服务器将保存的速度区间vi对应的stimin更新为sts;当sts大于或等于保存的速度区间vi对应的stimin,且小于或等于时,保存的速度区间vi对应的stimax时,云服务器保持保存的速度区间vi对应的stimax和stimin不变;
[0166]
当sfs大于保存的速度区间vi对应的sfimax时,云服务器将保存的速度区间vi对应的sfimax更新为sfs;当sfs小于保存的速度区间vi对应的sfimin时,云服务器将保存的速度区间vi对应的sfimin更新为sfs;当sfs大于或等于保存的速度区间vi对应的sfimin,且小于或等于保存的速度区间vi对应的sfimax时,云服务器保持保存的速度区间vi对应的sfimax和sfimin不变;
[0167]
当axs大于保存的速度区间vi对应的aximax时,云服务器将保存的速度区间vi对应的aximax更新为axs;当axs小于保存的速度区间vi对应的aximin时,云服务器将保存的速度区间vi对应的aximin更新为axs;当axs大于或等于保存的速度区间vi对应的aximin,且小于或等于保存的速度区间vi对应的aximax时,云服务器保持保存的速度区间vi对应的aximax和aximin不变;
[0168]
当ays大于保存的速度区间vi对应的ayimax时,云服务器将保存的速度区间vi对应的ayimax更新为ays;当ays小于保存的速度区间vi对应的ayimin时,云服务器将保存的速度区间vi对应的ayimin更新为ays;当ays大于或等于保存的速度区间vi对应的ayimin,且小于或等于保存的速度区间vi对应的ayimax时,云服务器保持保存的速度区间vi对应的ayimax和ayimin不变;
[0169]
当azs大于保存的速度区间vi对应的azimax时,云服务器将保存的速度区间vi对应的azimax更新为azs;当azs小于保存的速度区间vi对应的azimin时,云服务器将保存的速度区间vi对应的azimin修改为azs;当azs大于或等于保存的速度区间vi对应的azimin,且小于或等于保存的速度区间vi对应的azimax时,云服务器保持保存的速度区间vi对应的azimax和azimin不变。
[0170]
实例2
[0171]
本实例中描述tracker处于警戒模式下一次用户所处的第二状态的识别和报警过
程,参见图5,包括:
[0172]
步骤501、将tracker设置为警戒模式;
[0173]
步骤502、tracker每隔一个周期td(即上述预设时间),将用户步数snd、三轴加速度值(axd、ayd和azd)、用户所处的第一状态和位置信息上传到云服务器,云服务器计算出本次周期的移动速度vd、步幅std和步频sfd;
[0174]
步骤503、云服务器判断vd是否大于vmax;
[0175]
步骤504、当vd大于vmax时,说明用户处于超速状态,云服务器进行超速报警;
[0176]
步骤505、云服务器确定vd所在的速度区间vi,判断azd是否大于保存的速度区间vi对应的azimax;
[0177]
步骤506、当azd大于保存的速度区间vi对应的azimax时,判断是否已设置z轴向上加速度异常标志位fzu;
[0178]
步骤507、当未设置z轴向上加速度异常标志位fzu时,云服务器设置z轴向上加速度异常标志位fzu;当已设置z轴向上加速度异常标志位fzu时,云端服务器判断std是否大于保存的速度区间vi对应的stimax或sfd是否小于保存的速度区间vi对应的sfimin;
[0179]
步骤508、当std大于保存的速度区间vi对应的stimax或sfd小于保存的速度区间vi对应的sfimin时,说明当婴幼儿佩戴tracker时,婴幼儿很可能被成年人抱起移动,云服务器向tracker下发抱起移动报警指令,清空fzu,tracker进行抱起移动报警;
[0180]
步骤509、云服务器判断tracker是否处于跌落状态(tracker可根据g-sensor的值上报该状态);
[0181]
步骤510、当tracker处于跌落状态时,云服务器判断是否已设置跌落标志位fzd;
[0182]
步骤511、当已未设置跌落标志位fzd时,云服务器设置跌落标志位fzd;当已设置跌落标志位fzd时,说明上一个周期tracker已处于跌落状态,此时tracker或用户极可能从高处跌落,云服务器向tracker下发高处坠落报警指令,清空fzd,tracker进行高处坠落报警;
[0183]
步骤512、云端服务器判断std、sfd、azd、axd和ayd中是否存在三个以上参数不在对应的最小值和最大值范围内;
[0184]
步骤513、当std、sfd、azd、axd和ayd中存在三个以上参数不在最小值和最大值范围内时,说明使用者不是用户本人,云服务器向tracker下发非用户本人报警指令,tracker进行非用户本人报警;
[0185]
步骤514、云服务器判断tracker是否处于静止状态(tracker可根据g-sensor的值上报该状态);
[0186]
步骤515、当tracker处于静止状态时,云服务器向tracker下发遗失报警指令,tracker进行遗失报警。
[0187]
本发明另一个实施例提出了一种状态识别装置,包括处理器和计算机可读存储介质,所述计算机可读存储介质中存储有指令,当所述指令被所述处理器执行时,实现上述任一种状态识别方法。
[0188]
本发明另一个实施例提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一种状态识别方法的步骤。
[0189]
惨剧图6,本发明另一个实施例提出了一种状态识别装置(如上述云服务器),包
括:
[0190]
数据接收模块601,用于接收到追踪类设备每隔预设时间上传的用户的第一数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0191]
状态识别模块602,用于根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态。
[0192]
在本发明实施例中,状态识别模块602还用于:
[0193]
根据所述用户当前所处的第二状态向所述追踪类设备发送报警指令或向监护者的终端推送报警消息。
[0194]
在本发明实施例中,状态识别模块602具体用于采用以下任意一个或多个方式实现根据所述用户当前所处的第二状态向所述追踪类设备发送报警指令或向监护者的终端推送报警消息:
[0195]
当所述用户当前所处的第二状态为超速状态时,向所述追踪类设备发送超速报警指令;
[0196]
当所述用户当前所处的第二状态为紧急超速状态时,向所述追踪类设备发送紧急超速报警指令或向监护者的终端推送紧急超速报警消息;
[0197]
当所述用户当前所处的第二状态为被抱起状态时,向所述追踪类设备发送被抱起报警指令;
[0198]
当所述用户当前所处的第二状态为高处坠落状态时,向所述追踪类设备发送高处坠落报警指令或向监护者的终端推送高处坠落报警消息;
[0199]
当所述用户当前所处的第二状态为非用户本人状态时,向所述追踪类设备发送非用户本人报警指令或向监护者的终端推送非用户本人报警消息或遗失消息;
[0200]
当所述用户当前所处的第二状态为被抱起移动状态时,向所述追踪类设备发送被抱起移动报警指令和/或向监护者的终端推送被抱起移动报警消息;
[0201]
当所述用户当前所处的第二状态为遗失状态时,向所述追踪类设备发送遗失报警指令或向监护者的终端推送遗失报警消息。
[0202]
在本发明实施例中,数据接收模块601还用于:
[0203]
当追踪类设备处于第一模式时,接收到追踪类设备每隔预设时间上传的用户的第一数据;当所述追踪类设备处于第二模式时,接收到追踪类设备每隔预设时间上传的用户的第二数据;其中,用户的第二数据包括:步数、三轴加速度和位置信息;
[0204]
状态识别模块602具体用于:
[0205]
当追踪类设备处于第一模式时,根据用户的第一数据确定用户当前所处的第二状态;
[0206]
所述状态识别装置还包括:
[0207]
数据库更新模块603,用于当所述追踪类设备处于第二模式时,根据所述用户的第二数据确定是否更新保存的最大速度和用户在预设时间内的移动速度所在的速度区间对应的步幅的最大值和最小值、步频的最大值和最小值、以及三轴加速度的最大值和最小值。
[0208]
在本发明实施例中,数据库更新模块603具体用于采用以下方式实现根据所述用户的第二数据确定是否更新保存的最大速度和用户在预设时间内的移动速度所在的速度
区间对应的步幅的最大值和最小值、步频的最大值和最小值、以及三轴加速度的最大值和最小值:
[0209]
根据所述用户的第二数据计算所述用户在预设时间内的移动速度、步幅和步频;
[0210]
根据所述用户在预设时间内的移动速度确定是否更新所述云服务器中保存的最大速度;
[0211]
确定所述用户在预设时间内的移动速度所在的速度区间,根据所述用户在预设时间内的步幅确定是否更新保存的确定出的速度区间对应的步幅的最大值和最小值;
[0212]
根据所述用户在预设时间内的步频确定是否更新保存的确定出的速度区间对应的步频的最大值和最小值;
[0213]
根据所述用户的三轴加速度确定是否更新保存的确定出的速度区间对应的三轴加速度的最大值和最小值。
[0214]
在本发明实施例中,数据库更新模块603具体用于采用以下任意一个或多个方式实现根据用户在预设时间内的移动速度确定是否更新云服务器中保存的最大速度:
[0215]
当所述用户在预设时间内的移动速度大于所述云服务器中保存的最大速度时,将所述保存的最大速度更新为所述用户在预设时间内的移动速度;
[0216]
当所述用户在预设时间内的移动速度小于或等于所述云服务器中保存的最大速度时,保持保存的最大速度不变。
[0217]
在本发明实施例中,数据库更新模块603具体用于采用以下任意一个或多个方式实现根据用户在预设时间内的步幅确定是否更新保存的确定出的速度区间对应的步幅的最大值和最小值:
[0218]
当所述用户在预设时间内的步幅大于保存的确定出的速度区间对应的步幅的最大值时,将保存的确定出的速度区间对应的步幅的最大值更新为所述用户在预设时间内的步幅;
[0219]
当所述用户在预设时间内的步幅小于保存的确定出的速度区间对应的步幅的最小值时,将保存的确定出的速度区间对应的步幅的最小值更新为所述用户在预设时间内的步幅;
[0220]
当所述用户在预设时间内的步幅大于或等于保存的确定出的速度区间对应的步幅的最小值,且小于或等于保存的确定出的速度区间对应的步幅的最大值时,保持保存的确定出的速度区间对应的步幅的最大值和最小值不变。
[0221]
在本发明实施例中,数据库更新模块603具体用于采用以下任意一个或多个方式实现根据用户在预设时间内的步频确定是否更新保存的确定出的速度区间对应的步频的最大值和最小值:
[0222]
当所述用户在预设时间内的步频大于保存的确定出的速度区间对应的步频的最大值时,将所述保存的确定出的速度区间对应的步频的最大值更新为所述用户在预设时间内的步频;
[0223]
当所述用户在预设时间内的步频小于保存的确定出的速度区间对应的步频的最小值时,将所述保存的确定出的速度区间对应的步频的最小值更新为所述用户在预设时间内的步频;
[0224]
当所述用户在预设时间内的步频大于或等于所述保存的确定出的速度区间对应
的步频的最小值,且小于或等于所述保存的确定出的速度区间对应的步频的最大值时,保持所述保存的确定出的速度区间对应的步频的最大值和最小值不变。
[0225]
在本发明实施例中,数据库更新模块603具体用于采用以下任意一个或多个方式实现根据用户的三轴加速度确定是否更新保存的确定出的速度区间对应的三轴加速度的最大值和最小值:
[0226]
当所述用户在预设时间内的x轴加速度大于保存的确定出的速度区间对应的x轴加速度的最大值时,将所述保存的确定出的速度区间对应的x轴加速度的最大值更新为所述用户在预设时间内的x轴加速度;
[0227]
当所述用户在预设时间内的x轴加速度小于保存的确定出的速度区间对应的x轴加速度的最小值时,将所述保存的确定出的速度区间对应的x轴加速度的最小值更新为所述用户在预设时间内的x轴加速度;
[0228]
当所述用户在预设时间内的x轴加速度大于或等于所述保存的确定出的速度区间对应的x轴加速度的最小值,且小于或等于所述保存的确定出的速度区间对应的x轴加速度的最大值时,保持所述保存的确定出的速度区间对应的x轴加速度的最大值和最小值不变;
[0229]
当所述用户在预设时间内的y轴加速度大于保存的确定出的速度区间对应的y轴加速度的最大值时,将所述保存的确定出的速度区间对应的y轴加速度的最大值更新为所述用户在预设时间td内的y轴加速度;
[0230]
当所述用户在预设时间内的y轴加速度小于保存的确定出的速度区间对应的y轴加速度的最小值时,将所述保存的确定出的速度区间对应的y轴加速度的最小值更新为所述用户在预设时间td内的y轴加速度;
[0231]
当所述用户在预设时间内的y轴加速度大于或等于所述保存的确定出的速度区间对应的y轴加速度的最小值,且小于或等于所述保存的确定出的速度区间对应的y轴加速度的最大值时,保持所述保存的确定出的速度区间对应的y轴加速度的最大值和最小值不变;
[0232]
当所述用户在预设时间内的z轴加速度大于保存的确定出的速度区间对应的z轴加速度的最大值时,将所述保存的确定出的速度区间对应的z轴加速度的最大值更新为所述用户在预设时间内的z轴加速度;
[0233]
当所述用户在预设时间内的z轴加速度小于保存的确定出的速度区间对应的z轴加速度的最小值时,将所述保存的确定出的速度区间对应的z轴加速度的最小值更新为所述用户在预设时间td内的z轴加速度;
[0234]
当所述用户在预设时间内的z轴加速度大于或等于所述保存的确定出的速度区间对应的z轴加速度的最小值,且小于或等于所述保存的确定出的速度区间对应的z轴加速度的最大值时,保持所述保存的确定出的速度区间对应的z轴加速度的最大值和最小值不变。
[0235]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户的第一数据确定用户当前所处的第二状态:
[0236]
根据所述用户的第一数据计算所述用户在预设时间内的移动速度、步幅和步频;
[0237]
根据所述用户在预设时间内的移动速度、步幅、步频、所述三轴加速度和所述用户当前所处的第一状态中的一个或多个确定所述用户当前所处的第二状态。
[0238]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户的第一数据计算用户在预设时间内的移动速度、步幅和步频:
[0239]
所述云服务器根据所述用户的第一数据中的位置信息计算用户在预设时间内的移动距离,根据所述用户在预设时间内的移动距离和所述预设时间计算出所述用户在预设时间内的移动速度;
[0240]
根据所述用户的第一数据中的步数和所述用户在预设时间内的移动距离计算出所述用户在预设时间内的步幅;
[0241]
根据所述用户的第一数据中的步数和所述预设时间计算出所述用户在预设时间内的步频。
[0242]
在本发明实施例中,状态识别模块602具体用于采用以下任意一个或多个方式实现根据用户在预设时间内的移动速度、步幅、步频、三轴加速度和用户当前所处的第一状态中的一个或多个确定用户当前所处的第二状态:
[0243]
根据所述用户在预设时间内的移动速度确定用户当前所处的第二状态是否为超速状态或紧急超速状态;
[0244]
根据用户的z轴加速度确定所述用户当前所处的第二状态是否为被抱起状态;
[0245]
根据所述用户当前所处的第一状态确定所述用户当前所处的第二状态是否为高处坠落状态;
[0246]
根据所述用户在预设时间内的步幅和步频确定所述用户当前所处的第二状态是否为被抱起移动状态;
[0247]
根据所述用户在预设时间内的步幅、步频和三轴加速度确定所述用户当前所处的第二状态是否为非用户本人状态;
[0248]
根据所述用户当前所处的第一状态确定所述用户当前所处的第二状态是否为遗失状态。
[0249]
在本发明实施例中,状态识别模块602具体用于采用以下任意一个或多个方式实现根据所述用户在预设时间内的移动速度确定用户当前所处的第二状态是否为超速状态或紧急超速状态包括以下:
[0250]
当所述用户在预设时间内的移动速度大于保存的最大速度时,确定所述用户当前所处的第二状态为超速状态;
[0251]
当所述用户在预设时间内的移动速度大于保存的极限速度时,确定所述用户当前所处的第二状态为紧急超速状态。
[0252]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户的z轴加速度确定用户当前所处的第二状态是否为被抱起状态:
[0253]
当所述用户的z轴加速度大于保存的用户在预设时间内的移动速度所在的速度区间对应的z轴加速度的最大值,且未设置z轴向上加速度异常标志位时,所述云服务器设置所述z轴向上加速度异常标志位,确定所述用户当前所处的第二状态为被抱起状态。
[0254]
在本发明实施例中,状态识别模块602具体用于采用以下任意一个或多个方式实现根据用户当前所处的第一状态确定用户当前所处的第二状态是否为高处坠落状态:
[0255]
当所述用户当前所处的第一状态为跌落状态,且未设置跌落标志位时,设置所述跌落标志位;
[0256]
当所述用户当前所处的第一状态为跌落状态,且已设置所述跌落标志位时,确定所述用户当前所处的第二状态为高处坠落状态,清空跌落标志位。
[0257]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户在预设时间内的步幅和步频确定用户当前所处的第二状态是否为被抱起移动状态:
[0258]
当所述用户的z轴加速度大于保存的用户在预设时间内的移动速度所在的速度区间对应的z轴加速度的最大值,且已设置z轴向上加速度异常标志位;并且,所述用户在预设时间内的步幅大于保存的用户在预设时间内的移动速度所在的速度区间对应的步幅的最大值或所述用户在预设时间内的步频小于保存的用户在预设时间内的移动速度所在的速度区间对应的步频的最小值时,确定所述用户当前所处的第二状态为被抱起移动状态,清空z轴向上加速度异常标志位。
[0259]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户在预设时间内的步幅、步频和三轴加速度确定用户当前所处的第二状态是否为非用户本人状态:
[0260]
当满足以下三个或三个以上条件时,确定用户当前所处的第二状态为非用户本人状态:
[0261]
所述用户在预设时间内的步幅大于保存的用户在预设时间内的移动速度所在的速度区间对应的步幅的最大值,或所述用户在预设时间内的步幅小于保存的用户在预设时间内的移动速度所在的速度区间对应的步幅的最小值;
[0262]
所述用户在预设时间内的步频大于保存的用户在预设时间内的移动速度所在的速度区间对应的步频的最大值,或所述用户在预设时间内的步频小于保存的用户在预设时间内的移动速度所在的速度区间对应的步频的最小值;
[0263]
所述用户的x轴加速度大于保存的用户在预设时间内的移动速度所在的速度区间对应的x轴加速度的最大值,或所述用户在预设时间内的x轴加速度小于保存的用户在预设时间内的移动速度所在的速度区间对应的x轴加速度的最小值;
[0264]
所述用户的y轴加速度大于保存的用户在预设时间内的移动速度所在的速度区间对应的y轴加速度的最大值,或所述用户在预设时间内的y轴加速度小于保存的用户在预设时间内的移动速度所在的速度区间对应的y轴加速度的最小值;
[0265]
所述用户的z轴加速度大于保存的用户在预设时间内的移动速度所在的速度区间对应的z轴加速度的最大值,或所述用户在预设时间内的z轴加速度小于保存的用户在预设时间内的移动速度所在的速度区间vi对应的z轴加速度的最小值。
[0266]
在本发明实施例中,状态识别模块602具体用于采用以下方式实现根据用户当前所处的第一状态确定用户当前所处的第二状态是否为遗失状态:
[0267]
当所述用户当前所处的第一状态为静止状态时,所述云服务器确定所述用户当前所处的第二状态为遗失状态。
[0268]
参见图7,本发明另一个实施例提出了一种追踪类设备,包括:
[0269]
数据上传模块701,用于每隔预设时间采集用户的第一数据,将采集的用户的第一数据上传给云服务器;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;
[0270]
状态报警模块702,用于根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0271]
在本发明另一个实施例中,数据上传模块701具体用于:
[0272]
当处于第一模式时,每隔预设时间采集用户的第一数据,将采集的用户的第一数据上传给云服务器;当处于第二模式时,每隔预设时间采集用户的第二数据,将采集的用户的第二数据上传给云服务器;其中,用户的第二数据包括:步数、三轴加速度和位置信息;
[0273]
状态报警模块702具体用于:
[0274]
当处于第一模式时,根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0275]
在本发明实施例中,状态报警模块702具体用于采用以下任意一个或多个方式实现根据接收到的报警指令进行报警:
[0276]
当所述接收到的报警指令为超速报警指令时,进行超速报警,所述超速报警包括蜂鸣器报警;
[0277]
当所述接收到的报警指令为紧急超速报警指令时,进行紧急超速报警,所述紧急超速报警包括:向监护者的终端推送紧急超速报警消息;或者拨打监护者的电话号码;或者触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;
[0278]
当所述接收到的报警指令为被抱起报警指令时,进行被抱起报警,所述被抱起报警包括:触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;
[0279]
当所述接收到的报警指令为高处坠落报警指令时,进行高处坠落报警,所述高处坠落报警包括:拨打监护者的电话号码,或者向监护者的终端推送高处坠落报警消息;
[0280]
当所述接收到的报警指令为非用户本人报警指令时,进行非用户本人报警,所述非用户本人报警包括:蜂鸣器报警;或者触发拍照功能,并将图片上传云服务器;或者触发录音功能,并将所录的音频上传云服务器;或者触发拍照功能和录音功能,将图片和音频上传云服务器;或者拨打监护者的电话号码;或者向监护者的终端推送非用户本人报警消息或遗失消息;
[0281]
当所述接收到的报警指令为被抱起移动报警指令时,进行被抱起移动报警,所述被抱起移动报警包括:蜂鸣器报警,并拨打监护者的电话号码;或蜂鸣器报警,并向监护者的终端推送被抱起移动报警消息;
[0282]
当所述接收到的报警指令为遗失报警指令时,进行遗失报警,所述遗失报警包括:拨打监护者的电话号码,或者向监护者的终端推送遗失报警消息。
[0283]
上述状态识别装置的具体识别过程与前述实施例状态识别方法的具体识别过程相同,这里不再赘述。
[0284]
本发明另一个实施例提出了一种状态识别系统,包括:
[0285]
云服务器,用于接收到追踪类设备每隔预设时间上传的用户的第一数据;其中,用户的第一数据包括:步数、三轴加速度、用户当前所处的第一状态和位置信息;根据用户的第一数据确定用户当前所处的第二状态;其中,用户当前所处的第二状态包括以下任意一个或多个:超速状态、紧急超速状态、遗失状态、高处坠落状态、被抱起状态、被抱起移动状态、非用户本人状态;根据所述用户当前所处的第二状态向所述追踪类设备发送报警指令或向监护者的终端推送报警消息;
[0286]
追踪类设备,用于每隔预设时间采集用户的第一数据,将采集的用户的第一数据
上传给云服务器;根据接收到的报警指令进行报警或向监护者的终端推送报警消息。
[0287]
上述状态识别系统中的云服务器和追踪类设备的具体实现过程与前述实施例状态识别方法的具体实现过程相同,这里不再赘述。
[0288]
本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些组件或所有组件可以被实施为由处理器,如数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
[0289]
虽然本发明实施例所揭露的实施方式如上,但所述的内容仅为便于理解本发明实施例而采用的实施方式,并非用以限定本发明实施例。任何本发明实施例所属领域内的技术人员,在不脱离本发明实施例所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明实施例的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1