广角摄像模组的测试方法及其测试系统与流程
1.本发明涉及摄像模组领域,更进一步地涉及一种广角摄像模组的测试方法及其测试系统。
背景技术:
2.近年来,随着科技的发展,光电子器件快速发展,相机技术有了极大的发展,并且得到了广泛的应用。随着对于拍照需求的演变,人们已经不再仅仅满足于普通的拍照功能,很多消费者更倾向于拍摄具有较大场景的照片,比如高大的建筑和风景等。这样题材的照片使用景深较深、视场角较大的广角摄像模组能够满足。然而,虽然广角摄像模组的拍摄的视角较大、得到的图像的信息量较多,但是存在所拍摄的图像的畸变较大的缺点。并且,由于畸变较大的缺点导致摄像模组的光心测试的误差较大,影响摄像模组光心测试的精度。
3.需要指出的是,在传统广角摄像模组的光心(光心也即摄像模组的光学中心)测试过程中通常采用mark法、全曝光法以及拟合圆法,采用全曝光法和拟合圆法两种测试方法对广角摄像模组进行测试的缺陷是成本较高,综合效益较低。而采用传统的mark法,虽然成本较低,但是由于广角摄像模组所获取的图像的畸变而导致光心测试精度较低,不适用于高精度摄像模组的测试。
4.还需要指出的是,在传统广角摄像模组的生产测试过程中,广角摄像模组的光心测试和畸变标定是在不同的装置和工位完成的,在进行光心测试时需要平面光源或积分球或全曝光光源,而进行畸变标定是又需要另外的装置和操作人员进行,测试过程不仅繁琐,而且会消耗大量的人力物力,测试成本较高,而且测试效率较低。
5.综上所述,需要对广角摄像模组的光心测试和畸变标定的方法进行改进。
技术实现要素:
6.本发明的一个目的在于提供一摄像模组的测试方法及其测试系统,其能够同时对摄像模组进行光心测试和畸变标定,测试成本较低。
7.本发明的另一个目的在于提供一摄像模组的测试方法及其测试系统,其能够同时对摄像模组进行光心测试和畸变标定,测试效率较高。
8.本发明的另一个目的在于提供一摄像模组的测试方法及其测试系统,其对测试标板上的反畸变图案进行反畸变处理,以供提高标板图像中反畸变图案的规则程度,光心测试精度较高。
9.本发明的另一个目的在于提供一摄像模组的测试方法及其测试系统,其能够基于标板图像上的反畸变图案的变形值测得摄像模组的畸变系数,对摄像模组进行畸变标定。
10.本发明的另一个目的在于提供一摄像模组的测试方法及其测试系统,其中所述摄像模组的测试方法简单,便于实施。
11.相应的,为了实现以上至少一个发明目的,本发明提供一种广角摄像模组的测试方法,其用于对一广角摄像模组进行光心测试和畸变标定,所述广角摄像模组的视场角的
范围是120
°
至180
°
,所述测试方法包括:
12.获取测试标板的标板图像,其中所述测试标板上包括至少一组反畸变标识点,其中所述至少一组所述反畸变标识点在所述测试标板上围绕一中心点对称布置,其中所述反畸变标识点进一步包括一光心测试标识点和一畸变标定标识点,其中在采集所述标板图像时,该中心点对应于所述广角摄像模组的感光芯片的中心,其中所述反畸变标识点的图案样式为规则形状基于预设视场角下的畸变值进行畸变获得;
13.识别出所述标板图像中的至少一组所述反畸变标识点;
14.获得至少一组所述光心测试识点的中心坐标;
15.基于至少一组所述光心测试标识点的中心坐标,确定所述广角摄像模组的光心坐标;
16.获得至少一组所述畸变标定标识点的变形值;以及
17.基于至少一组所述畸变标定标识点的变形值,获得对应的所述广角摄像模组的畸变系数。
18.在本发明的一些优选实施例中,其中每一所述反畸变标识点位于同一视场角上。
19.在本发明的一些优选实施例中,其中所述光心测试标识点进一步包括一第一组光心测试标识点和一第二组光心测试标识点,其中所述第一光心测试标识点和所述第二光心测试标识点位于不同的视场角上,其中,基于至少一组所述反畸变标识点的中心坐标,确定所述广角摄像模组的光心坐标,包括:
20.基于所述第一组光心测试标识点的中心坐标,确定所述广角摄像模组的一第一光心坐标;
21.基于所述第二组光心测试标识点的中心坐标,确定所述广角摄像模组的一第二光心坐标;以及
22.基于所述第一光心坐标和所述第二光心坐标,确定所述广角摄像模组的光心坐标。
23.在本发明的一些优选实施例中,基于所述第一光心坐标和所述第二光心坐标,确定所述广角摄像模组的光心坐标,包括:
24.获得所述第一光心坐标和所述第二光心坐标的平均值,确定为所述广角摄像模组的光心坐标。
25.在本发明的一些优选实施例中,基于所述第一光心坐标和所述第二光心坐标,确定所述广角摄像模组的光心坐标,包括:
26.获得所述第一光心坐标和所述广角摄像模组的预设光心坐标之间的第一误差;
27.获得所述第二光心坐标和所述广角摄像模组的预设光心坐标之间的第二误差;以及
28.获得所述第一误差和所述第二误差中较小者对应的光心坐标,确定为所述广角摄像模组的光心坐标。
29.在本发明的一些优选实施例中,所述光心测试标识点的尺寸小于所述畸变标定标识点的尺寸。
30.在本发明的一些优选实施例中,所述测试标板的所述光心测试标识点由圆形进行变形获得,所述畸变标定标识点由多边形进行变形获得。
31.在本发明的一些优选实施例中,在获得至少一组所述畸变标定标识点的变形值中,所述变形值是所述畸变标定标识点在所述标板图像中的圆度值。
32.根据本发明的另一方面,本发明进一步提供一种测试系统,用于广角摄像模组的光心测试和畸变标定,其特征在于,包括:
33.测试标板,其中所述测试标板包括至少一组反畸变标识点,其中所述至少一组反畸变标识点在所述测试标板上围绕一中心点对称布置,其中所述反畸变标识点包括一光心测试标识点和一畸变标定标识点,其中在采集所述标板图像时,该中心点对应于所述广角摄像模组的感光芯片的中心,其中所述反畸变标识点的图案样式为规则形状基于预设视场角下的畸变值进行变形获得;
34.固持装置,其中所述固持装置用于安装该广角摄像模组,其中所述广角摄像模组的视场角的范围为120
°
~180
°
;以及
35.测试装置,其中所述测试装置包括:
36.标板图像获取单元,用于获取测试标板的标板图像;
37.识别单元,用于识别出所述标板图像中的至少一组所述反畸变标识点;
38.中心坐标获取单元,用于获得至少一组所述光心测试标识点的中心坐标;
39.光心坐标获取单元,用于基于至少一组所述光心测试标识点的中心坐标,确定所述广角摄像模组的光心坐标;
40.变形值获取单元,用于获得至少一组所述畸变标定标识点的变形值;以及
41.一畸变系数获取单元,用于基于至少一组所述畸变标定标识点的变形值,确定所对应的所述广角摄像模组的畸变系数。
42.在本发明的一些优选实施例中,每一组所述反畸变标识点位于同一视场角上。
43.在本发明的一些优选实施例中,所述光心测试标识点进一步包括一第一组光心测试标识点和一第二组光心测试标识点,其中所述第一组光心测试标识点和所述第二组光心测试标识点位于不同的视场角上,其中所述光心坐标获取单元,进一步用于:
44.基于所述第一组光心测试标识点的中心坐标,确定所述广角摄像模组的第一光心坐标;
45.基于所述第二组光心测试标识点的中心坐标,确定所述广角摄像模组的第二光心坐标;以及
46.基于所述第一光心坐标和所述第二光心坐标,确定所述广角摄像模组的光心坐标。
47.在本发明的一些优选实施例中,所述光心坐标获取单元进一步用于:
48.获得所述第一光心坐标和所述第二光心坐标的平均值,确定为所述广角摄像慢走的光心坐标。
49.在本发明的一些优选实施例中,所述光心坐标获取单元进一步用于:
50.获得第一光心坐标和所述广角摄像模组的预设光心坐标之间的第一误差;
51.获得第二光心坐标和所述广角摄像模组的预设光心坐标之间的第二误差;以及
52.将第一误差和第二误差中较小者对应的光心坐标,确定为所述广角摄像模组的光心坐标。
53.在本发明的一些优选实施例中,所述变形值获取单元用于获取至少一组所述畸变
标定标识点的圆度值,确定为至少一组所述反畸变标识点的变形值。
54.在本发明的一些优选实施例中,所述光心测试标识点的尺寸小于所述畸变标定标识点的尺寸。
55.在本发明的一些优选实施例中,所述光心测试标识点是由圆形基于预设的畸变值进行变形获得,所述畸变标定标识点是由多边形基于预设的畸变值进行变形获得。
56.根据本发明的另一方面,本发明进一步提供一种测试标板,用于广角摄像模组的光心测试和畸变标定,包括:
57.一标板主体;和
58.至少一组反畸变标识点,其中所述至少一组反畸变标识点被设于所述标板主体的一侧,并且所述至少一组反畸变标识点在所述标板主体上围绕一中心点对称布置,其中所述至少一组所述反畸变标识点进一步包括一光心测试标识点和一畸变标定标识点,在采集所述标板图像时,该中心点对应于所述广角摄像模组的感光芯片的中心,其中,所述反畸变标识点的图案样式为规则形状基于预设视场角下的畸变值进行变形获得。
59.在本发明的一些优选实施例中,每一组所述反畸变标识点位于同一视场角上。
60.在本发明的一些优选实施例中,所述光心测试标识点的尺寸小于所述畸变标定标识点的尺寸
61.在本发明的一些优选实施例中,所述光心测试标识点是由圆形基于预设的畸变值进行变形获得,所述畸变标定标识点是由多边形基于预设的畸变值进行变形获得。
附图说明
62.图1a图示了现有技术中基于mark法测试光心的一种测试标板的示意图。
63.图1b图示了针对于现有的测试标版所采集的标板图像的示意图。
64.图2是根据本发明的一个优选实施例的摄像模组测试过程的流程示意图。
65.图3是根据本发明的一个优选实施例的测试标板的结构示意图。
66.图4是根据本发明的一个优选实施例的标板图像的结构示意图。
67.图5是根据本发明的一个优选实施例的圆度测量结构示意图。
68.图6是根据本发明的一个优选实施例的测试标板的一变形实施方式的结构示意图。
69.图7是根据本发明的一个优选实施例的标板图像的一变形实施方式的结构示意图。
70.图8是根据本发明的一个优选实施例的测试标板的一变形实施方式的结构示意图。
71.图9是根据本发明的一个优选实施例的标板图像的一变形实施方式的结构示意图。
72.图10是根据本发明的一个优选实施例的摄像模组测试系统的框图结构示意图。
具体实施方式
73.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定
的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
74.本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
75.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
76.参考说明书附图2至图10,本发明所提供的摄像模组的测试方法及其测试系统被阐述,本发明所提供的所述摄像模组的测试方法能够基于同一测试标板同时对该摄像模组进行光心测试和畸变系数的测试,能够降低生产成本提高测试效率。
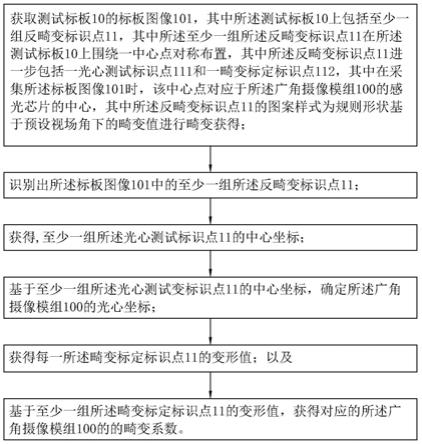
77.具体的,参考说明书附图2,本发明所提供的摄像模组的测试方法被阐述,其中所述摄像模组的测试方法包括:
78.获取测试标板10的标板图像101,其中所述测试标板10上包括至少一组反畸变标识点11,其中所述至少一组所述反畸变标识点11在所述测试标板10上围绕一中心点对称布置,其中所述反畸变标识点11进一步包括一光心测试标识点111和一畸变标定标识点112,其中在采集所述标板图像101时,该中心点对应于所述广角摄像模组100的感光芯片的中心,其中所述反畸变标识点11的图案样式为规则形状基于预设视场角下的畸变值进行畸变获得;
79.识别出所述标板图像101中的至少一组所述反畸变标识点11;
80.获得,至少一组所述光心测试标识点11的中心坐标;
81.基于至少一组所述光心测试变标识点11的中心坐标,确定所述广角摄像模组100的光心坐标;
82.获得每一所述畸变标定标识点11的变形值;以及
83.基于至少一组所述畸变标定标识点11的变形值,获得对应的所述广角摄像模组100的的畸变系数。
84.具体的,在所述步骤101中,所述测试标板10的所述标板图像101由一广角摄像模组100获取,并且在所述广角摄像模组100获取所述测试标板10的所述标板图像101时,所述广角摄像模组100的感光芯片的中心对应于所述测试标板10上至少一组所述反畸变标点11的对称中心。
85.进一步地,所述测试标板10的所述反畸变标识点11是由规则形状基于该广角摄像模组100基于预设视场角下的畸变值进行变形获得,在所述标板图像101中,所述反畸变标识点11随着所述标板图像101的形变发生形变,并且在所述标板图像101中所述反畸变标识点11大致呈现规则的几何形状,以便于确定所述反畸变标识点11的几何中心坐标,以供提高该广角摄像模组100的光心测试精度和畸变标定的精度。
86.具体的,所述测试标板10包括一标板主体12和被设于所述标板主体12一侧的至少一组所述反畸变标识点11,其中所述反畸变标识点11由规则的图案基于广角摄像模组的预
设视场下的畸变值进行变形获得,其中所述规则图案选自圆形和正多边形中的任意一种。
87.在获取所述测试标板10的所述标板图像101之后,识别出所述标板图像101中的至少一组所述反畸变标识点11。在获得至少一组所述光心测试标识点11的中心坐标步骤中,在识别所述标板图像101中的所述反畸变标识点11之后,确定所述标板图像101中的至少一组所述光心测试标识点111中的每一光心测试标识点的中心,并计算获得每一所述光心测试标识点的中心坐标。
88.在基于至少一组所述光心测试变标识点11的中心坐标,确定所述广角摄像模组100的光心坐标步骤中,在至少一组所述光心测试标识点111的中心坐标确定之后,基于所述光心测试标识点111的中心坐标计算获得所述广角摄像模组100的光心坐标,也就是所述广角摄像模组100的实际光心的坐标。
89.优选的,在本优选实施例中,一组所述光心测试标识点111所包括的光心测试标识点的数量是四个,并且四个所述反畸变标识点11的位置分别相对于所述标板主体12的一中心点相互对称。在所述标板图像101中,各所述光心测试标识点111的中心的连线的交点位置是各所述光心测试标识点111的几何中心,也就是所述广角摄像模组100的实际光心的位置,然后计算确定所述实际光心的坐标。
90.值得一提的是,在本优选实施例中,在所述标板图像101中一组所述光心测试标识点111的四个所述反畸变标识点分别位于所述广角摄像模组100的同一视场内,也就是说,在所述测试标板10上一组所述光心测试标识点111的四个所述反畸变标识点能够基于同一畸变值变形获得,以便于所述测试标板10上的所述光心测试标识点111的制作。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,一组所述光心测试标识点111的光心测试标识点还能够位于所述标板图像101的不同视场内,一组所述光心测试标识点111中的两个所述反畸变标识点位于同一视场内,另外两个所述光心测试标识点111位于另一视场内,四个所述光心测试标识点呈菱形布置。本领域的技术人员应当理解的是,只要能够达到本发明的发明目的,所述光心测试标识点111在视场内的具体分布情况不应当构成对本发明的限制。
91.反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11值得一提的是,在本优选实施例中,所述测试标板10上的所述反畸变标识点11的形变设计与该摄像模组100的畸变系数有关,在所述反畸变标识点11依照该摄像模组100的畸变系数发生形变后,所述反畸变标识点11能够大致呈现为规则的几何图形,以便于确定所述反畸变标识点11的几何中心,提高摄像模组光心测试的精度。也就是说,所述测试标板10的所述反畸变标识点11设计的目的是使得在所述标板图像101中所述反畸变标识点11能够更加的规整,以便于确定反畸变标识点11的几何中心。本领域的技术人员应当理解的是,在所述测试标板10的所述反畸变标识点11的实际设计过程中能够通过实验的方式确定所述反畸变标识点11的具体形状。
92.还需要指出的是,在本优选实施例中,在通过该摄像模组100获取所述测试标板10的所述标板图像101后,通过计算所述标板图像101中所述反畸变标识点11中的所述畸变标定标识点112的变形值,并能够依据所获取的所述变形值计算该摄像模组100的畸变系数,对该摄像模组100进行畸变标定。
93.值得一提的是,在本发明所提供的摄像模组的测试方法中,通过该摄像模组100所获取的所述测试标板10的所述标板图像101能够同时完成该摄像模组100的光心测试和该摄像模组的畸变系数的测试,完成该摄像模组100的畸变标定,即提高了该摄像模组100的测试效率,也降低了该摄像模组100的测试成本。
94.反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11反畸变标识点11本领域的技术人员应当理解的是,在所述广角摄像模组100的所述光心坐标确定之后,能够将所述广角摄像模组100的所述光心坐标与一所述广角摄像模组100的一理论光心坐标相比较,以判断所述广角摄像模组100的光心是否合格。具体的,将该广角摄像模组100的所述实际光心的位置与该广角摄像模组100的一理论光心的位置相比较,当该广角摄像模组100的所述实际光心与所述理论光心之间的距离小于或等于一预设距离,则认定该广角摄像模组100的光心符合要求,该广角摄像模组100合格,当该广角摄像模组100的所述实际光心与所述理论光心之间的距离大于所述预设距离时,则认定该广角摄像模组100的光心不符合要求,该广角摄像模组100不合格。
95.优选的,在本优选实施例中,所述预设距离是两个像素的距离。当该广角摄像模组100的所述实际光心与所述理论光心之间的距离小于或等于两个像素,则认定该广角摄像模组符合要求,该广角摄像模组合格,当该广角摄像模组100的所述实际光心与所述理论光心之间的距离大于两个像素,则认定该广角摄像模组不符合要求,该广角摄像模组不合格。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,所述预设距离还能够被实施为其他的像素距离,只要能够达到本发明的发明目的,所述预设距离的具体数值不应当构成对本发明的限制。
96.进一步地,在获得至少一组所述畸变标定标识点112的变形值步骤中,在识别出所述标板图像101中的至少一组所述反畸变标识点11后,识别并计算所述反畸变标识点11的所述畸变标定标识点112的变形值,以供对所述广角摄像模组100进行畸变标定。
97.具体的,在获得至少一组所述畸变标定标识点112的变形值步骤中,计算所述标板图像101中所述反畸变标识点11的所述畸变标定标识点112的变形值中,采用计算所述标板图像101中所述畸变标定标识点112的圆度的方式计算所述畸变标定标识点112的变形值。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,还能够通过其他的方式计算所述标板图像101中所述畸变标定标识点112的变形值,只要能够达到本发明的发明目的,具体计算所述标板图像101中的所述畸变标定标识点112的变形值的方式不应当构成对本发明的限制。
98.进一步地,在基于至少一组所述畸变标定标识点112的变形值,获得对应的所述广角摄像模组100的畸变系数步骤中,在计算获得至少一组所述反畸变标识点112的变形值后,获得所述变形值所对应的畸变系数,以供对所述广角摄像模组100进行畸变标定。
99.具体的,由于在本优选实施例中,采用圆度值表示所述畸变标定标识点112的变形值,在计算出所述标板图像101中的各所述畸变标定标识点112的圆度值后,从圆度值与畸变系数的对应关系中获取相应的畸变系数,以获得与所述变形值相对应的畸变系数。
100.本领域的技术人员应当理解的是,在获得所述变形值所对应的畸变系数之后,能够将所述畸变系数烧录到所述广角摄像模组100中,以供完成该广角摄像模组100的畸变标
定。可以理解的是,变形值与畸变系数的对应关系能够通过实验的方式获得,并输入到摄像模组的测试系统中。
101.参考说明书附图3和图4,值得一提的是,在本优选实施例中,所述测试标板10的所述反畸变标识点11的所述光心测试标识点111和所述畸变标定标识点112是同一组图案,也就是说,在该广角摄像模组100的光心测试和畸变标定过程中使用的是同一组所述反畸变标识点11,一组所述反畸标识点同时用于畸变标定和光心测试,极大地提高了摄像模组测试的效率,便于摄像模组的测试。还需要指出的是,在本优选实施例中,所述标板图像101中所述反畸变标识点11位于所述标板图像101的同一视场内,在畸变标定的过程中所获得的所述畸变系数是本视场内的系数,在本发明的另一些优选实施例中,所述测试标板10的所述反畸变标识点11的数量能够被实施为多组,并且在所述标板图像101中分别位于所述标板图像101的不同视场内,以供测得该广角摄像模组100的不同视场内的畸变系数,完成对该广角摄像模组100的多个视场的畸变标定。
102.优选的,在本优选实施例中,所述测试标板10的所述反畸变标识点11在所述标板图像101中是圆形,以便于确定所述反畸变标识点11的几何中心以及测试所述反畸变标识点11的圆度。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,所述测试标板10的所述反畸变标识点11在所述标板图像101中的形状还能够是三角形、矩形等形状,只要能够达到便于确定所述反畸变标识点11的几何中心的目的,所述反畸变标识点11在所述标板图像101中的具体形状不应当构成对本发明的限制。
103.具体的,在本优选实施例中,所述测试标板10包括多组所述反畸变标识点11,在所述标板图像101中,多组所述反畸变标识点11分别位于所述标板图像101的不同视场内,以便于对该摄像模组100的不同视场内的畸变系数进行测试,还能够在一些实施例中提高摄像模组光心测试的精度。
104.参考说明书附图6和图7,本发明所提供的所述广角摄像模组的测试方法的一变形实施方式被阐述,在本变形实施方式中,所述测试标板10的所述反畸变标识点11的所述光心测试标识点111进一步包括一第一组光心测试标识点1111和一第二组光心测试标识点1112,在所述标板图像101中,所述第一组光心测试标识点1111和所述第二组光心测试标识点1112分别被设于不同的视场角内。并且在本优选实施例中,所述反畸变标识点11的所述畸变标定标识点112被设于与所述第一组光心测试标识点1111和所述第二组光心测试标识点1112不同的视场角内。
105.在本优选实施例中,在获得至少一组所述光心测试标识点的中心坐标步骤中,获取所述第一组光心测试标识点1111和所述第二组光心测试标识点1112的中心坐标。
106.在基于至少一组所述光心测试标识点111的中心坐标,确定所述广角摄像模组100的光心坐标的步骤中,基于所述第一组光心测试标识点1111的中心坐标确定一第一光心1110的坐标,基于所述第二组光心测试标识点1112的中心坐标确定一第二光心1120的坐标,然后基于所述第一光心1110和所述第二光心1120确定所述广角摄像模组100的实际光心坐标。
107.优选的,在本优选实施例中,在基于所述第一光心1110和所述第二光心1120确定所述广角摄像模组100的实际光心坐标的步骤中,计算获得所述第一光心1110和所述第二光心1120的坐标值的平均值为所述广角摄像模组100的光心的坐标值,也就是所述广角摄
像模组100的实际光心的坐标值。
108.在本发明的另一些优选实施例中,在基于所述第一光心1110和所述第二光心1120确定所述广角摄像模组100的实际光心坐标的步骤中进一步包括,获得所述第一光心1110的坐标和所述广角摄像模组100的预设光心坐标之间的第一误差;获得所述第二光心1120的坐标和所述广角摄像模组100的预设光心坐标之间的第二误差;以及获得所述第一误差和所述第二误差中较小者对应的光心坐标,确定为所述广角摄像模组100的光心坐标。优选的,在本优选实施例中,所述广角摄像模组100的所述预设光心坐标是所述广角摄像模组100的理论光心的坐标值,所述第一差值是所述第一光心1110的坐标值与所述广角摄像模组100的所述理论光心坐标值之间的差值,所述第二差值是所述第二光心1120的坐标值与所述广角摄像模组100的所述理论光心坐标值之间的差值。比如,当所述第一误差小于所述第二误差时,将所述第一光心1110的坐标确定为是所述广角摄像模组100的实际光心坐标,当所述第一误差大于所述第二误差时,将所述第二光心1120的坐标确定为是所述广角摄像模组100的实际光心坐标。还需要指出的是,在本优选实施例中,所述预设的光心坐标是所述广角摄像模组100的理论光心的坐标,也就是说,将所述第一光心1110的坐标值和所述第二光心1120的坐标值分别和所述广角摄像模组100的所述理论光心的坐标值相比较,以分别获得所述第一误差和所述第二误差。
109.优选的,在本优选实施例中,所述测试标板10的所述第一组光心测试标识点1111、所述第二组光心测试标识点1112以及所述畸变标定标识点112分别由规则的圆形基于预设的畸变值进行变形获得,也即是说,在所述标板图像101中,所述第一组光心测试标识点1111、所述第二组光心测试标识点1112以及所述畸变标定标识点112分别近似为规则的圆形,以便于所述光心测试和畸变标定。进一步地,所述第一光心测试标识点1111和所述第二组光心测试标识点1112的大小小于所述畸变标定标识点112,以便于确定所述第一光心测试标识点1111和所述第二组光心测试标识点1112的中心,便于获得所述畸变标定标识点112的变形值。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,所述测试标板10的所述第一组光心测试标识点1111、所述第二组光心测试标识点1112以及所述畸变标定标识点112分别由规则的多边形基于预设的畸变值进行变形获得,比如三角形、矩形等。在本发明的另一些优选实施例中,所述测试标板10的所述第一组光心测试标识点1111和所述第二组光心测试标识点1112由圆形基于预设的畸变值进行变形获得,所述畸变标定标识点112由规则的多边形基于预设的畸变值进行变形获得,比如三角形、矩形等。
110.为了更好地阐述本发明,在本发明中将所述标板图像101自中心到边缘的区域依次定义为一第一视场1011、一第二视场1012以及一第三视场1013,所述光心测试标识点111的所述第一组光心测试标识点1111和所述第二组光心测试标识点1112分别位于所述第一视场1011和所述第二视场1012,所述畸变标定标识点112位于所述第三视场1013,所述第一组光心测试标识点1111和所述第二组光心测试标识点1112用于测试所述广角摄像模组100的光心,所述畸变标定标识点112用于所述广角摄像模组100的畸变标定。优选的,在本优选实施例中,由于所述畸变标定标识点112位于所述第三视场角1013内,因此能够获得所述第三视场角的1013的畸变系数,完成对所述广角摄像模组100的所述第三视场角1013的畸变标定。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,所述畸变标定标识点的数量还能够被实施为多组,并分别被设于所述第一视场角1011、所述第二视场角
1102以及所述第三视场角1103,以供计算获得所述第一视场角1011、所述第二视场角1102以及所述第三视场角1103的畸变系数。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,还能够计算获得所述第一组光心测试标识点1111和所述第二组光心测试标识点1112的变形值,以供计算获得所述第一视场角1011和所述第二视场角1012的畸变系数。
111.参考说明书附图8和图9,本发明所提供的所述广角摄像模组的测试方法的另一变形实施方式被阐述,在本变形实施方式中,所述畸变标定标识点112包括一第一组畸变标定标识点1121和一第二组畸变标定标识点1122,所述光心测试标识点111的数量是一组,其中所述第一组畸变标定标识点1121和所述第二组反畸变标识点1122分别位于所述第一视场角1011和所述第三视场角1013,所述光心测试标识点111位于所述第二视场角1012。所述第一组畸变标识点1121和所述第二组畸变标识点1122分别用于所述广角摄像模组100的所述第一视场角1011和所述第二视场角1022的畸变标定,所述光心测试标识点111用于所述广角摄像模组100的光心测试。
112.优选的,在本优选实施例中,在所述测试标板10中,所述第一组畸变标识点1121和所述第二组畸变标识点1122分别由规则的多边形基于预设的畸变值变形获得,比如三角形、矩形等,在所述标板图像101中所述第一组畸变标识点1121和所述第二组畸变标识点1122为近似规则的多边形。在所述测试标板10中,所述光心测试标识点111由规则的圆形基于预设的畸变值变形获得,以供用于所述广角摄像模组100的光心测试。
113.优选的,在本优选实施例中,所述光心测试标识点111的的大小小于所述第一组畸变标识点1121和所述第二组畸变标识点1122的大小。
114.在获得至少一组所述反畸变标识点112的变形值步骤中,分别获取所述第一组畸变标定标识点1121和所述第二畸变标定标识点1122的变形值,以供获得所述第一视场角1011和所述第三视场角1013内的畸变系数。
115.在基于至少一组所述畸变标识点112的变形值,获得对应的所述广角摄像模组100的畸变系数的步骤中,在获取所述第一组畸变标定标识点1121和所述第二畸变标定标识点1122的变形值,分别获取两所述变形值所对应的畸变系数,以供获得所述广角摄像模组100的所述第一视场角1011和所述第三视场角1013的畸变系数。
116.参考说明书附图10,根据本发明的另一方面,本发明进一步提供一广角摄像模组的测试系统20,其用于对一广角摄像模组100进行光心测试和畸变标定,具体的,所述广角摄像模组的测试系统20包括一测试标板10、一固持装置以21及一光心测试装置22,其中所述测试标板10上包括至少一组所述反畸变标识点11,其中所述至少一组所述反畸变标识点11在所述测试标板10上围绕一中心点对称布置,其中所述反畸变标识点11进一步包括一光心测试标识点111和一畸变标定标识点112,所述光心测试标识点111和一畸变标定标识点112分别用于所述广角摄像模组100的光心测试和畸变标定,在采集所述标板图像101时,该中心点对应于所述广角摄像模组100的感光芯片的中心,其中所述反畸变标识点的图案样式为规则形状基于预设视场角下的畸变值进行变形获得;所述固持装置用于安装该广角摄像模组100,其中所述广角摄像模组100的视场角的范围为120
°
至180
°
。其中所述光心测试装置进一步包括一标板图像获取单元221、一识别单元222、一中心坐标获取单元223、一光心坐标获取单元224、一变形值获取单元225以及一畸变系数获取单元226,其中所述标板图
像获取单元221用于获取所述测试标板10的所述标板图像101,所述识别单元222用于识别出所述标板图像101中的至少一组所述反畸变标识点11,所述中心坐标获取单元223用于获得每一所述反畸变标识点11的中心坐标,所述光心坐标获取单元224用于基于至少一组所述反畸变标识点11的中心坐标,确定所述广角摄像模组100的光心坐标,所述变形值获取单元225用于获得至少一组所述反畸变标识点112的变形值,所述畸变系数获取单元226用于基于至少一组所述畸变标定标识点112的变形值确定对应的所述广角摄像模组100的畸变系数。
117.需要指出的是,在本优选实施例中,所述光心坐标获取单元224所确定的所述广角摄像模组100的光心坐标是所述广角摄像模组100的实际光心坐标。在所述广角摄像模组100的所述实际光心坐标确定之后,将所述广角摄像模组100的所述实际光心坐标与一理论光心坐标相比较,当两者之间的坐标差值小于或等于一预设值时,则认定所述广角摄像模组100合格,当两者之间的坐标差值大于该预设值时,则认定所述广角摄像模组100不合格。
118.优选的,在本优选实施例中,所述预设值是两个像素,也就是说,当所述广角摄像模组100的所述实际光心与所述理论光心之间的距离小于或等于两个像素,则认定所述广角摄像模组100合格,当两者之间的距离大于两个像素则认定所述广角摄像模组100不合格。本领域的技术人员应当理解的是,在本发明的另一些优选实施例中,所述预设距离还能够被实施为其他的值,只要能够达到本发明的发明目的,所述预设值的具体大小不应当构成对本发明的限制。
119.进一步地,所述测试标板10上的所述反畸变标识点11是由规则的几何图案基于预设的畸变值经过一定的变形获得,所述规则的几何图案能够选自圆形和多边形中的任意一种。并且,所述测试标板10的所述反畸变标识点11在所述标板图像101中一组所述反畸变标识点11位于同一视场内,也就是说,一组所述反畸变标识点11能够由同一规则图案基于同一预设畸变值获得,以便于所述测试标板10上的所述反畸变标识点11的制作。
120.在本发明的另一些优选实施例中,所述测试标板10上的所述光心测试标识点111的数量是两组,也就是说,所述光心测试标识点111进一步包括一第一组光心测试标识点1111和一第二组光心测试标识点1112。所述中心坐标获取单元223能够分别获得所述第一组光心测试标识点1111和所述第二组光心测试标识点1112的中心坐标,所述光心坐标获取单元224分别能够基于所述第一组光心测试标识点1111的坐标和所述第二组光心测试标识点1112的坐标计算获得一第一光心1110和一第二光心1120,所述光心坐标获取单元224能够基于所述第一光心1110和所述第二光心1120计算获得所述广角摄像模组100的光心的位置,也就是所述广角摄像模组100的实际光心的位置。
121.优选的,在本优选实施例中,所述光心坐标获取单元224计算所述第一光心1110坐标和所述第二光心1120坐标的平均值作为所述广角摄像模组100的光心的位置,也就是所述广角摄像模组100的实际光心的位置。
122.在本发明的另一些优选实施例中,在计算获得所述第一光心1110的坐标和所述第二光心1120的坐标后,所述光心坐标获取单元224能够获取所述第一光心1110的坐标和所述广角摄像模组100的一预设光心坐标之间的第一误差,获得所述第二光心1120的坐标和所述广角摄像模组100的所述预设光心坐标之间的一第二误差,将所述第一误差和所述第二误差中较小者所对应的光心坐标确定为是所述广角摄像模组100的光心坐标。比如,当所
述第一误差小于所述第二误差时,将所述第一光心1110的坐标确定为是所述广角摄像模组100的光心坐标,当所述第一误差大于所述第二误差时,将所述第二光心1120的坐标确定为是所述广角摄像模组100的光心坐标,当所述第一误差等于所述第二误差时,选取所述第一光心1110的坐标和所述第二光心1120的坐标中的任一个为所述广角摄像模组100的光心坐标。
123.优选的,在本优选实施例中,所述光心测试标识点111由规则的圆形基于预设的畸变值进行变形获得,所述畸变标定标识点112由规则的多边形基于预设的畸变值进行变形获得,所述光心测试标识点111在所述标板图像101为近似规则的圆形,所述畸变标定标识点112在所述标板图像101中为近似规则的多边形,比如三角形,矩形等。并且,所述光心测试标识点111的大小小于所述畸变标定标识点112的大小。
124.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
125.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1