信息处理装置、信息处理方法以及服务器与流程
1.本发明涉及一种信息处理装置、信息处理方法以及服务器。
背景技术:
2.以往,已知一种在多个车辆间发送接收表示车辆的位置、速度等车辆数据的通信数据包的方法(专利文献1)。这样的在多个车辆间的发送接收被称为车车间通信。在专利文献1所记载的发明中,在车车间通信的通信品质为容许级别以上的情况下,采用比狭域发送周期长的广域发送周期,在通信品质小于容许级别的情况下,采用与狭域发送周期相等的值或比其小的值的第二广域发送周期。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2017/159240号
技术实现要素:
6.发明要解决的问题
7.然而,即使设为能够通过车车间通信(直接通信)进行通信,也有可能由于之后的路径中的建筑物、大型车辆等的影响而导致电波的强度变弱或者数据无法送达。在专利文献1中,虽然记载了在通信环境劣化的情况下切换频率的内容,但没有对将来的通信环境进行判定。因此,专利文献1所记载的发明在将来通信环境劣化后,根据其劣化情况来进行应对,因此有可能无法及时地接收必要数据,驾驶辅助、自动驾驶的余裕有可能变少。
8.本发明是鉴于上述问题而完成的,其目的在于提供一种能够判定将来的通信环境的信息处理装置、信息处理方法以及服务器。
9.用于解决问题的方案
10.本发明的一个方式所涉及的信息处理装置获取移动体将来会行驶的第一将来位置,获取其它移动体将来会行驶的第二将来位置,判定移动体与其它移动体之间的当前的通信环境,基于第一将来位置和第二将来位置来校正当前的通信环境,基于校正后的当前的通信环境,来判定移动体与其它移动体之间的将来的通信环境。
11.发明的效果
12.根据本发明,能够判定将来的通信环境。
附图说明
13.图1是本发明的第一实施方式所涉及的通信网络的整体概要图。
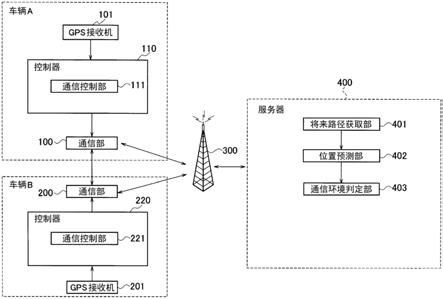
14.图2是本发明的第一实施方式所涉及的车辆以及服务器的概要结构图。
15.图3是说明本发明的第一实施方式所涉及的行驶场景的一例的图。
16.图4是说明本发明的第一实施方式所涉及的车辆以及服务器的动作例的流程图。
17.图5是说明本发明的第一实施方式所涉及的车辆以及服务器的动作例的流程图。
18.图6是本发明的第二实施方式所涉及的车辆以及服务器的概要结构图。
19.图7是说明本发明的第二实施方式所涉及的行驶场景的一例的图。
20.图8是说明本发明的第二实施方式所涉及的车辆以及服务器的动作例的流程图。
21.图9是说明本发明的第二实施方式所涉及的车辆以及服务器的动作例的流程图。
22.图10是说明本发明的第二实施方式的变形例1所涉及的行驶场景的一例的图。
23.图11是说明本发明的第二实施方式的变形例2所涉及的行驶场景的一例的图。
24.图12是说明本发明的第二实施方式的变形例3所涉及的行驶场景的一例的图。
25.图13是说明本发明的第二实施方式的变形例4所涉及的行驶场景的一例的图。
26.图14是说明本发明的第二实施方式的变形例5所涉及的行驶场景的一例的图。
27.图15是本发明的第三实施方式所涉及的车辆以及服务器的概要结构图。
28.图16是说明本发明的第三实施方式所涉及的车辆以及服务器的动作例的流程图。
29.图17是说明本发明的第三实施方式所涉及的车辆以及服务器的动作例的流程图。
30.图18是说明本发明的第三实施方式所涉及的车辆以及服务器的动作例的流程图。
31.图19是本发明的其它实施方式所涉及的车辆以及服务器的概要结构图。
具体实施方式
32.下面,参照附图对本发明的实施方式进行说明。在附图的记载中,对同一部分标注同一附图标记并省略说明。
33.(第一实施方式)
34.下面,参照附图对本发明的第一实施方式进行说明。在附图的记载中,对同一部分标注同一附图标记并省略说明。
35.参照图1来说明本实施方式所涉及的通信网络的整体概要。如图1所示,在本实施方式所涉及的通信网络中包括车辆a、车辆b、基站300、移动电话网310以及服务器400。
36.车辆a(移动体)具备通信部100,该通信部100具有通信功能。车辆b(其它移动体)具备通信部200,该通信部200具有通信功能。通信部100和通信部200例如是天线、调制解调器、应用处理器、存储器等。通信部100和通信部200经由基站300及移动电话网310来与服务器400进行通信。基站300是不移动的固定的通信装置,是覆盖移动电话网310的接入点。另外,通信部100和通信部200能够经由基站300和服务器400相互通信。以下,将经由基站300和服务器400进行的通信部100与通信部200的通信定义为间接通信。在本实施方式中,使用移动电话网310、因特网网上的服务器来进行间接通信。服务器配置不限定于此,也可以使用其它无线通信方式(例如wifi热点、移动电话网内封闭区域网络上的服务器等)。
37.并且,通信部100与通信部200也能够不经由基站300和服务器400而直接进行通信。以下,将这样的不经由基站300和服务器400的通信定义为直接通信。此外,直接通信也可以表现为车车间通信。在本实施方式中,车辆a和车辆b通过直接通信或间接通信来共享与车辆(车辆a、车辆b、还包括其它车辆)、道路信息等有关的多个数据。在多个数据中包含位置信息、速度信息、与行进方向有关的数据等。由于直接通信不经由基站300和服务器400,因此能够以低延迟且简单的结构向对方发送数据。在无法通过直接通信发送的大的数据、以固定时间信息不变地重复发送时,使用间接通信。另外,在无法进行直接通信的情况下使用间接通信。
38.车辆a和车辆b既可以是具有自动驾驶功能的车辆,也可以是不具有自动驾驶功能的车辆。另外,车辆a和车辆b也可以是能够在自动驾驶与手动驾驶之间切换的车辆。在本实施方式中,将车辆a和车辆b设为具有自动驾驶功能的车辆来进行说明。
39.接着,参照图2对车辆a、车辆b以及服务器400的结构例进行说明。
40.首先,对车辆a的结构例进行说明。
41.如图2所示,车辆a具备上述的通信部100、gps接收机101以及控制器110。此外,通信部100、gps接收机101以及控制器110也可以统一表现为信息处理装置。
42.gps接收机101通过接收来自人造卫星的电波来检测地面上的车辆a的位置信息。在gps接收机101所检测的车辆a的位置信息中包含纬度信息、经度信息以及时刻信息。gps接收机101将检测到的车辆a的位置信息输出到控制器110。此外,检测车辆a的位置信息的方法不限定于gps接收机101。例如,也可以使用被称为测程法(odometry)的方法来估计位置。测程法是通过根据车辆a的旋转角、旋转角速度求出车辆a的移动量和移动方向来估计车辆a的位置的方法。此外,gps(global positioning system:全球定位系统)是gnss(global navigation satellite system:全球导航卫星系统)的一部分。
43.控制器110是具备cpu(中央处理装置)、存储器以及输入输出部的通用的微型计算机。在微型计算机中安装有用于作为信息处理装置发挥功能的计算机程序。通过执行计算机程序,微型计算机作为信息处理装置所具备的多个信息处理电路而发挥功能。此外,在此示出通过软件来实现信息处理装置所具备的多个信息处理电路的例子,但当然也能够准备用于执行以下所示的各信息处理的专用的硬件来构成信息处理电路。另外,也可以利用单独的硬件来构成多个信息处理电路。控制器110具备通信控制部111,来作为多个信息处理电路的一例。
44.通信控制部111基于通信环境来控制通信方式。在本实施方式中,通信环境包括接收强度、移动速度、多重反射、信道利用率以及自动删除率中的至少一种特性。移动速度是指车辆a和车辆b的车速。信道利用率表示与其它车辆或行人的终端等其它设备进行通信的利用率。自动删除率表示在超过了规定的信道利用率时间隔剔除数据的比率。通信控制部111在通信环境不好的情况下,从直接通信切换为间接通信。通信控制部111使用由通信环境判定部403判定出的通信环境,但不限定于此。通信控制部111也可以具备判定通信环境的功能。而且,通信控制部111也可以使用自身判定出的通信环境来控制通信方式。
45.通信部100向车辆a的周围广播发送包含车辆a的当前的位置信息、行驶计划信息等的车辆a位置数据。在广播发送中使用直接通信方式。直接通信方式例如是依据ieee 802.11p的dsrc方式(频率:5.9ghz频带)或者依据3gp p release14以后的规格的蜂窝v2x方式。当前的位置信息是将表示车辆的位置的纬度、经度与获取到该位置时的时间建立了关联的数据。行驶计划信息是行驶计划数据,该行驶计划数据包含对车辆的将来位置关联了车速的车速计划数据以及将来的行驶路径数据。将来的行驶路径数据既可以是行驶到预先设定的目的地的行驶道路的路线信息,也可以是基于车速计划数据将将来位置(纬度、经度)与预定通过时刻建立了关联的数据。例如,行驶计划信息是对依据sae2735(dedicated short range communications(dsrc)message set dictionary:专用短程通信(dsrc)消息集词典)的消息的数据追加车速计划数据所得到的数据。表1中示出广播发送的车辆a位置数据的例子。车辆a位置数据作为包含头部和内容数据的包数据(package data),通过通信
部100发送,并由车辆b的通信部200接收,或者经由基站300由服务器400的将来路径获取部401获取。
46.如表1所示,在车辆a位置数据的头部中存储有作为发送源的车辆a的识别编号和表示内容数据中包含的内容的类型的识别信息(例如,当前的位置信息、表示行驶计划信息的识别用的id)。在内容数据中存储有将纬度、经度与获取到这些信息的时间建立了关联的数据即当前的位置信息以及行驶计划信息。由车辆a的控制器110基于从gps接收机101和各种传感器102获取到的数据以及被预先记录到控制器110所具备的存储器中的数据,来生成这些头部和内容数据,从而生成车辆a位置数据。
47.表1
[0048][0049]
接着,对车辆b的结构例进行说明。
[0050]
如图2所示,车辆b具备上述的通信部200、gps接收器201以及控制器220。此外,通信部200、gps接收机201以及控制器220也可以统一表现为信息处理装置。
[0051]
gps接收机201的功能与gps接收机101的功能相同。与控制器110同样地,控制器220是具备cpu、存储器以及输入输出部的通用的微型计算机。控制器220具备通信控制部221,来作为多个信息处理电路的一例。通信控制部221的功能与通信控制部111的功能相同。
[0052]
通信部200接收由车辆a的通信部100发送来的车辆a位置数据,并将接收到的车辆a位置数据输出到数据接收部222。数据接收部222从通信部200获取车辆a位置数据。通信部200接收到车辆a位置数据意味着在车辆a与车辆b之间建立了直接通信。因此,在通信部200接收到车辆a位置数据的情况下,通信控制部221向服务器400发送包含车辆a的当前的位置信息和车辆a的行驶计划信息的车辆a位置数据以及表示车辆b与车辆a之间建立了直接通信的信号等。此时,通信控制部221也将包含车辆b的当前的位置信息和车辆b的行驶计划信息的车辆b位置数据如表1所示的包数据那样一并发送到服务器400。
[0053]
与控制器110同样地,服务器400是具备cpu、存储器以及输入输出部的通用的微型计算机。服务器400具备将来路径获取部401、位置预测部402以及通信环境判定部403,来作为多个信息处理电路的一例。
[0054]
将来路径获取部401基于经由基站300接收到的车辆a位置数据和车辆b位置数据,针对车辆a和车辆b分别获取当前的位置、行驶计划信息。将来路径获取部401既可以接收并获取从车辆b的通信部200发送来的这些数据,也可以构成为接收从车辆a的通信部100发送来的车辆a的位置数据(车辆a的当前的位置信息、行驶计划信息),并接收从车辆b的通信部200发送来的车辆b的位置数据(车辆b的当前的位置信息、行驶计划信息)。并且,服务器400既可以读出过去接收并存储到存储器中的行驶计划信息,也可以构成为向车辆a和车辆b分
别请求行驶计划信息并接收该行驶计划信息。将来路径获取部401将获取到的行驶计划信息输出到位置预测部402。
[0055]
位置预测部402基于从车辆b获取到的车辆a和车辆b的位置信息以及从将来路径获取部401获取到的行驶计划信息,预测将来的车辆a和车辆b的将来位置。例如,位置预测部402基于所预测出的车辆a和车辆b的将来位置来预测将来的车辆b相对于车辆a的相对位置及相对距离。位置预测部402将预测出的位置关系输出到通信环境判定部403。
[0056]
通信环境判定部403基于通过位置预测部402预测出的将来的车辆a与车辆b的位置关系来判定车辆a与车辆b之间的将来的通信环境。另外,通信环境判定部403估计能够通过直接通信发送的数据量。在数据量的估计中,使用表示其它车辆、行人等进行通信的状况的信道利用率以及表示在超过了规定的信道利用率时间隔剔除数据的比率的数据自动删除率。这些信道利用率和数据自动删除率例如适用于saej2945/1等。
[0057]
(通信环境判定方法)
[0058]
接着,参照图3来说明由通信环境判定部403进行的通信环境判定的一例。
[0059]
通信环境判定部403基于车辆a与车辆b的位置关系来估计电波强度。电波强度是表示电波的强度的指标。此外,电波强度也有时表现为接收强度。参照图3对车辆a与车辆b的位置关系的一例进行说明。在图3所示的场景中,车辆a在单车道道路上直行。车辆b在单侧三车道道路的中央车道上直行。车辆a行驶的道路与车辆b行驶的道路交叉。车辆a和车辆b以40km/h的速度在距交叉路口500m远的近前地点行驶。在将车辆a的位置坐标设为(xa、ya)、将车辆b的位置坐标设为(xb、yb)的情况下,车辆a与车辆b的在直线上的距离d(以下简称为距离d)用式1表示。此外,将位置坐标(xa、ya)、(xb、yb)设为初始位置。
[0060]
[数1]
[0061]
d=((yb
‑
ya)^2+(xb
‑
xa)^2}^1/2...(1)
[0062]
车辆a和车辆b将来会行驶的路径由将来路径获取部401获取。在图3所示的场景中,车辆a和车辆b将来会行驶的路径是直行路径。位置预测部402基于由将来路径获取部401获取到的路径来预测将来的车辆a与车辆b的位置关系。由于车辆a和车辆b以40km/h的速度行驶,因此随着车辆a和车辆b接近交叉路口,距离d逐渐变短。距离d在初始位置处为最大值,在交叉路口附近为最小值。电波强度根据距离d、即根据车辆a与车辆b的位置关系而变化。因此,通信环境判定部403按从距离d的最大值到最小值的每个距离来评价电波强度的衰减。以下,有时将每个距离的电波强度的衰减称为距离衰减。此外,距离d的最小值也可以被设定为零。在电波强度的衰减的评价中使用式2。
[0063]
[数2]
[0064][0065]
在此,pt[dbm]是发送机的执行辐射功率,一般由法规上的天线功率上限值来决定。gr[db]是接收机的增益。λ[m]是载波频率的波长。π是圆周率。
[0066]
一般来说,由于道路面与车辆的天线的高度不同,因此路面反射波与直接通信波互相重叠。因此,已知接收功率与从道路面到天线的距离相应地大幅地变动的现象。通信环境判定部403使用式3和式4来评价该现象。
[0067]
[数3]
[0068][0069]
[数4]
[0070][0071]
在此,ht是车辆a的天线的高度。在车辆a的位置信息中包含ht的情况下使用该值。在车辆a的位置信息中不包含ht且车辆a是大型车辆的情况下,基于车辆a的高度例如将ht设定为3.5m。在除此以外的情况下,基于轿车类型的一般高度,例如将ht设定为1.55m。此外,大型车辆例如是卡车、公共汽车等。此外,在车辆a向车辆b发送的数据中也可以包含车辆a是否为大型车辆。
[0072]
hr是车辆b的天线的高度。hr的设定与ht的设定相同,因此省略说明。另外,使用了上述的式2~式4的评价方法一般是已知的,因此省略说明。
[0073]
在估计出电波强度之后,通信环境判定部403对与通信部200的发送接收数据速率相应的最低接收灵敏度pr_min[dbm]进行评价,来评价能够以发送接收数据速率进行通信的距离范围。具体地说,通信环境判定部403按每个距离评价通信部200的接收强度。例如在使用its频率(5.9ghz频带)的情况下,基于因无线的中心频率和接收电场强度的变动因素(大地反射的2波模型)而产生的拐点,距离d的解析间隔被设定为1m。也就是说,作为一例,每个距离是指每1m。
[0074]
在路径的所有地点(以下,有时称为整个区间)接收强度高于最低接收功率的10倍的情况下,通信环境判定部403判定为能够在整个区间进行直接通信。最低接收功率是指能够确保通信所需的接收品质的最小的接收功率。或者,也可以是,在整个区间内接收强度高于平均接收功率的10倍的情况下,通信环境判定部403判定为能够在整个区间进行直接通信。在路径的一部分地点(以下,有时称为一部分区间)接收强度为接收灵敏度以下的情况下,通信环境判定部403判定为在一部分区间难以进行直接通信。此外,在一部分区间内接收强度为接收灵敏度以下的情况下,记录相应的区间。
[0075]
这样,通信环境判定部403按每个距离评价接收强度所得到的结果是,在整个区间内接收强度超过阈值的情况下,判定为能够在整个区间内进行直接通信。另外,在存在接收强度为阈值以下的区间的情况下,通信环境判定部403判定为在该区间内难以进行直接通信。由此,通信环境判定部403设想偶然实现了直接通信的初始连接的情况或由于路面反射等的影响而急剧地发生衰减的情况,且能够判别对方是否不再进行通信或通信是否暂时中断。此外,阈值也可以被定义为接收灵敏度。
[0076]
接着,参照图4~图5所示的流程图对车辆a、车辆b以及服务器400的动作例进行说明。
[0077]
在步骤s101中,车辆a使用gps接收机101检测车辆a的位置信息。处理进入步骤s105,车辆a向车辆a的周围广播发送在步骤s101中检测到的位置信息。
[0078]
处理进入步骤s107,车辆b从车辆a接收数据。处理进入步骤s109,车辆b使用gps接收机201检测车辆b的位置信息。处理进入步骤s111,车辆b向服务器400发送车辆a的位置信息、车辆b的位置信息以及表示与车辆a之间建立了直接通信的信号等。
[0079]
处理进入步骤s113,服务器400从车辆b接收数据。处理进入步骤s115,服务器400
获取车辆a和车辆b的行驶计划信息。进入步骤s117,服务器400基于在步骤s115中获取到的行驶计划信息来预测将来的车辆a与车辆b的位置关系。处理进入步骤s119,服务器400按每个距离评价接收强度。
[0080]
处理进入步骤s121,在整个区间内接收强度超过阈值的情况下(在步骤s121中为“是”),服务器400判定为能够在整个区间内进行直接通信(步骤s123)。另一方面,在存在接收强度为阈值以下的区间的情况下(在步骤s121中为“否”),服务器400判定为难以在该区间内进行直接通信。
[0081]
(作用和效果)
[0082]
根据第一实施方式,获取车辆a将来会行驶的第一将来位置,获取车辆b将来会行驶的第二将来位置,基于从车辆b接收到的信号来判定车辆a与车辆b之间的当前的通信环境,基于获取到的第一将来位置和第二将来位置来校正当前的通信环境,基于校正后的当前的通信环境来判定车辆a与车辆b之间的将来的通信环境。根据第一实施方式,在车辆a与车辆b之间最初建立了直接通信的时间点,基于之后的将来会行驶的路径来判定是否能够维持直接通信。如果将来能够维持直接通信,则通过直接通信来共享位置信息等,因此例如能够制定与自动驾驶辅助有关的计划。另外,由于能够预先检测必要的信息没有送达的可能性,因此能够准备面向其它通信单元(例如经由移动电话网310进行的间接通信)的连接。由此,能够在必要的定时交换必要的信息。另外,能够消除如现有技术那样的在切断直接通信之后切换为间接通信时所产生的初始连接时间。另外,在直接通信稳定的情况下,没有必要保持经由不需要的移动电话网310进行的间接通信的连接,因此能够减少经由移动电话网的数据通信量、车载器(控制器110)的计算处理负担等。
[0083]
此外,在第一实施方式中,也可以是,获取车辆a将来会行驶的第一将来路径以及车辆b将来会行驶的第二将来路径,预测车辆a将来在所获取到的第一将来路径中的第一将来位置,预测车辆b将来在所获取到的第二将来路径中的第二将来位置,基于所预测出的第一将来位置和第二将来位置来校正当前的通信环境。
[0084]
(第二实施方式)
[0085]
接着,参照图6来说明本发明的第二实施方式。在第二实施方式中,车辆a具备传感器102。另外,车辆b具备传感器202。另外,服务器具备道路信息获取部404和遮挡物判定部405。对于与第一实施方式重复的结构,引用附图标记并省略其说明。以下,以不同点为中心进行说明。
[0086]
传感器102搭载于车辆a,用于检测车辆a的信息以及车辆a的周围的物体。例如,传感器102检测道路上或道路周边的物体。传感器102由多个传感器构成。例如,传感器102包括车轮速度传感器、转向角传感器、陀螺仪传感器等。利用这些传感器检测车辆a的速度、转向角等。另外,传感器102包括摄像机、激光雷达(lidar:light detection and ranging)、无线探测和测距雷达(radar:radio detection and ranging)、毫米波雷达、激光测距仪、声纳等。利用这些传感器检测包括其它车辆(也包括车辆b)、摩托车、自行车、行人在内的移动物体以及包括障碍物、下落物、停车车辆在内的静止物体、道路的形状、道路构造物、道路周围的建筑物,来作为车辆a的周围的物体。在车辆a的周围存在其它车辆的情况下,检测其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等,来作为具体的检测数据。另外,也可以生成用三维上的点的集合
来表现由上述传感器探测到的车辆周围的形状的三维数据。由传感器102检测到的这些与车辆a的周围的物体有关的对象数据经由通信部100、车辆b的通信部200以及基站300被发送到服务器400的将来路径获取部。在表2中示出对象数据的例子。如表2所示,在对象数据的头部中例如存储有探测到物体的车辆的识别编号、车辆在探测物体时所使用的传感器信息以及表示内容数据中包含的内容类型的识别信息。在传感器信息中例如包含与传感器的识别信息(制造商名称、型号名称、传感器的类型)、向车辆安装传感器的安装方式(相对于车辆的相对朝向)、传感器规格(解析度、分辨率、视角等)、传感器的识别状态(测量精度)有关的数据。在表示内容包中包含的内容类型的识别信息中例如包含用于识别所探测到的物体(例如,行人、停车车辆、障碍物等)的数据。
[0087]
[表2]
[0088][0089]
通信部200所接收到的由传感器102检测到的车辆a的对象数据被存储在车辆b的存储装置(省略图示)中。
[0090]
传感器202搭载于车辆b,用于检测车辆b的信息以及车辆b的周围的物体。传感器202的功能与传感器102的功能相同,因此省略说明。控制器220基于由传感器202检测到的数据生成车辆b的对象数据,来作为表2所示的包数据,并经由通信部200将其发送到服务器400,服务器400的将来路径获取部获取该车辆b的对象数据。另外,同样地,车辆b的控制器220也可以构成为经由通信部200向车辆a发送车辆b的对象数据,并由车辆a的通信部100接收该车辆b的对象数据。另外,被存储到车辆b的存储装置中的由传感器102检测到的车辆a的对象数据也经由通信部200被发送到服务器400。
[0091]
道路信息获取部404获取地图信息(包含道路构造、道路的车道数、道路上的建筑物等)、拥堵信息、邻近的停车场的空闲状况、事故信息、施工信息、信号灯信息等。道路信息获取部404既可以从车辆b获取这些信息,也可以从因特网上的云获取这些信息。车辆b能够通过v2i(vehicle to infr astructure:车与基础设施之间的信息交换)获取这些信息,并
将这些信息提供给服务器400。v2i是在车辆与设置在道路上的通信设备之间交换信息的技术,有时被称为路车间通信。此外,在由车辆a检测到的信息中也可以包含这些信息。道路信息获取部404将获取到的信息输出到遮挡物判定部405。
[0092]
遮挡物判定部405从道路信息获取部404获取地图信息等。另外,遮挡物判定部405从位置预测部402获取将来的车辆a与车辆b的位置关系。遮挡物判定部405获取由传感器102和传感器202检测到的数据。遮挡物判定部405针对将来的车辆a和车辆b的位置所能采取的组合来计算直线路径。将来的车辆a和车辆b的位置所能采取的组合是指车辆a和车辆b沿着行驶路径行驶的情况下的每个距离(例如1m)的位置的组合。即,遮挡物判定部405针对从距离d的最大值到最小值的每个距离来计算直线路径。直线路径是将车辆a与车辆b以直线方式连结而得到的路径。因此,在本实施方式中,直线路径也有时与道路以外的区域重叠。遮挡物判定部405判定在计算出的直线路径上是否存在建筑物。
[0093]
另外,遮挡物判定部405计算车辆a和车辆b的沿途路径。车辆a和车辆b的沿途路径是将从车辆a到车辆b的道路上的路径以沿着车辆a和车辆b的行驶路径的方式连结而得到的路径。遮挡物判定部405判定在沿途路径上是否存在大型车辆。遮挡物判定部405将判定结果输出到通信环境判定部403。
[0094]
通信环境判定部403基于从遮挡物判定部405获取到的信息来校正当前的通信环境。具体地说,通信环境判定部403基于建筑物、大型车辆的存在来校正当前的电波强度,从而校正当前的通信环境。然后,通信环境判定部403基于校正后的当前的通信环境来判定将来的通信环境。
[0095]
(通信环境校正方法)
[0096]
接着,参照图7来说明当前的通信环境的校正方法的一例。在图7所示的场景中,车辆a的速度等与图3相同。图7与图3的不同点在于,存在建筑物500以及在车辆b的前方存在前车c。
[0097]
如图7所示,在车辆a的位置为初始位置(xa、ya)、车辆b的位置为初始位置(xb、yb)的情况下,遮挡物判定部405计算将车辆a与车辆b以直线方式连结而得到的直线路径10。由于车辆a和车辆b以40km/h的速度行驶,因此车辆a和车辆b逐渐地接近交叉路口。在车辆a和车辆b沿着行驶路径行驶的情况下,每隔规定距离(例如1m),遮挡物判定部405计算直线路径。在图7中,作为一例,示出车辆a处于位置(xa1、ya1)、车辆b处于位置(xb1、yb1)时的直线路径11。在直线路径10上不存在建筑物500,但在直线路径11上存在建筑物500。由遮挡物判定部405判定在直线路径11上存在建筑物500的情况。关于建筑物500的场所,只要参照地图信息就能够得到。这样,遮挡物判定部405基于地图信息以及车辆a与车辆b之间的位置关系来判定在将来的直线路径上是否存在建筑物500。此外,建筑物500是存在于车辆a和车辆b的路径外(道路外)的建筑物。
[0098]
如图7所示,在车辆b的前方存在前车c。将前车c设为比车辆a和车辆b大的大型车辆来进行说明。车辆a和车辆b是普通汽车。能够根据传感器102或传感器202的检测结果来判定前车c是否为大型车辆。例如,如果根据传感器102或传感器202的检测结果明确前车c的高度比车辆a和车辆b的高度高,则判定为前车c是大型车辆。如图7所示,前车c存在于沿途路径12上。由遮挡部判定部405判定在沿途路径12上存在前车c的情况。更为详细地说,遮挡部判定部405基于从传感器102或传感器202获取到的数据判定为在沿途路径12上存在前
车c。此外,检测建筑物500和前车c的理由是,由于在直接通信中使用的电波有可能被建筑物500和前车c阻断。此外,遮挡物判定部405向通信环境判定部403输出建筑物500的存在以及前车c的存在。
[0099]
通信环境判定部403基于从遮挡物判定部405获取到的信息来校正当前的通信环境。当前的通信环境在图7所示的场景中是指车辆a和车辆b处于初始位置时的通信环境。在判定为在将车辆a的将来位置(xa1、ya1)与车辆b的将来位置(xb1、yb1)以直线方式连结而得到的直线路径11上存在建筑物500的情况下,通信环境判定部403选择沿途路径12来作为直接通信的路径,对距离衰减乘以遮挡物衰减率。在本实施方式中,设想沿着直线路径进行直接通信的情况、沿着沿途路径进行直接通信的情况或者使用两个路径进行直接通信的情况。例如,在车辆a和车辆b处于初始位置时,也可以沿着直线路径进行直接通信。
[0100]
作为对距离衰减乘以遮挡物衰减率的具体例,通信环境判定部403对估计电波强度乘以30db(10^
‑
3)。该值(30db)是用于预测可否利用直接通信的一例,没有特别地限定。关于用于预测可否利用直接通信的值,请参照下述的文献。recommendation itu
‑
r p.1411
‑
6(02/2012)(https://www.itu.int/dms_pu brec/itu
‑
r/rec/p/r
‑
rec
‑
p.1411
‑6‑
201202
‑
s!!pdf
‑
e.pdf)
[0101]
如在第一实施方式中所说明的那样,估计电波强度是由通信环境判定部403估计出的电波强度。
[0102]
另外,在图7所示的场景中,由于在沿途路径12中检测到大型车辆(前车c),因此通信环境判定部403对估计电波强度乘以12.5db(约10^
‑
1)。该值(12.5db)也是用于预测可否利用直接通信的一例,没有特别地限定。关于用于预测可否利用直接通信的值,请参照下述的文献。3gpp tr37.885“study on evaluation methodology of new vehicle
‑
to
‑
everything v2x use case for lt e and nr,”2018
[0103]
在本实施方式中,在沿途路径12上存在大型车辆意味着在车辆a或车辆b将来会行驶的路径上存在大型车辆。
[0104]
遮挡物衰减率是上述的30db、12.5db。校正当前的通信环境意味着对估计电波强度乘以遮挡物衰减率。以下,将乘以遮挡物衰减率后的估计电波强度称为校正后的估计电波强度。通信环境判定部403按每个距离评价校正后的估计电波强度。校正后的估计电波强度在整个区间内超过阈值的情况下,通信环境判定部403判定为能够在整个区间内进行直接通信。另外,在存在校正后的估计电波强度为阈值以下的区间的情况下,通信环境判定部403判定为难以在该区间内进行直接通信。阈值与在第一实施方式中使用的阈值相同。
[0105]
此外,将在沿途路径12上检测到前车c的情况下所乘以的12.5db与乘以30db所得到的值相乘。此外,在沿途路径12上没有检测到前车c的情况下,基于仅乘以30db所得到的值来判定将来的通信环境。此外,在直线路径11上不存在建筑物500且在沿途路径12上检测到前车c的情况下,基于仅乘以12.5db所得到的值来判定将来的通信环境。
[0106]
这样,通信环境判定部403校正当前的通信环境,基于校正后的当前的通信环境来判定将来的通信环境。由此,能够预先防备通信环境劣化的情况。
[0107]
接着,参照图8~图9所示的流程图对车辆a、车辆b以及服务器400的动作例进行说明。但是,步骤s201、s205~s219的处理与图4~图5所示的步骤s101、s105~s119所示的处理相同,因此省略说明。
[0108]
在步骤s203中,车辆a检测与车辆b共享的数据。与车辆b共享的数据是车辆a的位置信息、速度信息以及与行进方向有关的信息。此外,在步骤s201中检测出车辆a的位置信息。在与车辆b共享的数据中也包含其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等。
[0109]
处理进入步骤s221,服务器400按从距离d的最大值到最小值的每个距离来计算直线路径。接着,服务器400判定在直线路径上是否存在建筑物(遮挡物)。在直线路径上存在建筑物的情况下(在步骤s221中为“是”),处理进入步骤s223,服务器400选择沿途路径来作为直接通信的路径,对估计电波强度乘以30db。在直线路径上不存在建筑物的情况下(在步骤s221中为“否”)以及在步骤s223之后,处理进入步骤s225。在步骤s225中,服务器400判定在沿途路径上是否存在大型车辆。
[0110]
在沿途路径上存在大型车辆的情况下(在步骤s225中为“是”),处理进入步骤s227,服务器400对估计电波强度乘以12.5db。在沿途路径上不存在大型车辆的情况下(在步骤s225中为“否”)以及在步骤s227之后,处理进入步骤s229。在步骤s229中,在估计电波强度在整个区间内超过阈值的情况下(在步骤s229中为“是”),服务器400判定为能够在整个区间内进行直接通信(步骤s231)。另一方面,在存在估计电波强度为阈值以下的区间的情况下(在步骤s229中为“否”),服务器400判定为难以在该区间内进行直接通信。
[0111]
(作用和效果)
[0112]
根据第二实施方式,服务器400从车辆a或车辆b获取车辆a和车辆b将来会行驶的路径(第一将来路径、第二将来路径)。此外,服务器400也可以从车辆a获取车辆a将来会行驶的路径,从车辆b获取车辆b将来会行驶的路径。服务器400基于从车辆b接收到的信号来判定车辆a与车辆b之间的当前的通信环境。另外,服务器400预测在车辆a和车辆b将来会行驶的路径上的车辆a和车辆b将来的位置(第一将来位置和第二将来位置)。如图7所示,如果明确车辆a和车辆b的行驶路径、行进方向、速度,则预测每隔规定距离的车辆a和车辆b的将来的位置。服务器400基于预测出的车辆a和车辆b的将来的位置来校正当前的通信环境。然后,服务器400基于校正后的当前的通信环境来判定车辆a和车辆b的将来的通信环境。另外,服务器400也可以向车辆a和车辆b通知所判定出的将来的通信环境。由此,车辆a和车辆b能够预先防备通信环境劣化的情况。例如,车辆a和车辆b能够在切断直接通信之前预先连接到间接通信。由此,从直接通信切换为间接通信时的初始连接所需要的时间减少,因此能够实现顺畅的数据共享。
[0113]
另外,服务器400也可以基于根据车辆a和车辆b的将来的位置确定的将来的车辆a与车辆b的相对距离,来校正当前的通信环境。由此,车辆a和车辆b能够基于与对方之间的距离的变化来预先防备通信环境劣化的情况。
[0114]
另外,服务器400针对将车辆a与车辆b的将来的位置以直线方式连结而得到的直线路径、以及将从车辆a到车辆b的道路上的路径沿着车辆a和车辆b的行驶路径的方式连结而得到的沿途路径分别判定车辆a与车辆b之间的将来的通信环境。例如,在判定为在直线路径上存在建筑物的情况下,服务器400对估计电波强度乘以30db(10^
‑
3),来校正当前的通信环境。然后,服务器400基于校正后的当前的通信环境来判定车辆a与车辆b之间的将来的通信环境。另外,在判定为在沿途路径上存在大型车辆的情况下,服务器400对估计电波强度乘以12.5db,来校正当前的通信环境。然后,服务器400基于校正后的当前的通信环境
来判定车辆a与车辆b之间的将来的通信环境。这样,针对直线路径和沿途路径这两种路径评价可能阻断电波的对象的影响。由此,车辆a和车辆b能够预先防备通信环境劣化的情况。
[0115]
另外,服务器400获取包含车辆a和车辆b将来会行驶的路径的地图信息。然后,服务器400基于与车辆a将来会行驶的路径、车辆b将来会行驶的路径、车辆a的将来的位置以及车辆b的将来的位置中的至少任一者相应的地图信息,来判定车辆a与车辆b之间的将来的通信环境。服务器400能够获取车辆a将来会行驶的路径、车辆b将来会行驶的路径、车辆a的将来的位置以及车辆b的将来的位置中的至少任一者。服务器400通过将所获取到的信息与地图信息进行对照,能够判定在车辆a和车辆b将来会行驶的路径上是否存在可能阻断电波的建筑物(参照图7)。由此,服务器400在车辆a和车辆b将来会行驶的路径上评价可能阻断电波的建筑物的影响,并校正当前的通信环境。然后,服务器400基于校正后的当前的通信环境来判定车辆a与车辆b之间的将来的通信环境。由此,车辆a和车辆b能够预先防备通信环境劣化的情况。
[0116]
另外,服务器400获取由传感器102或传感器202检测到的数据。在由传感器102或传感器202检测到的数据中包含在沿途路径上存在的大型车辆的数据。服务器400对在车辆a和车辆b将来会行驶的路径上可能阻断电波的大型车辆的影响进行评价。此外,建筑物是静态的对象,与此相对地,大型车辆是动态的对象。也就是说,服务器400能够针对静态的对象和动态的对象分别评价影响。由此,服务器400能够高精度地判定车辆a与车辆b之间的将来的通信环境。
[0117]
另外,服务器400也可以获取车辆a将来会向车辆b发送的数据量或者会从车辆b接收的数据量。服务器400也可以判定在所判定出的将来的通信环境中是否能够发送或接收所获取到的数据量。如果明确在所判定出的将来的通信环境中无法发送或接收所获取到的数据量,则车辆a和车辆b能够预先防备通信环境劣化的情况。例如,车辆a和车辆b能够在切断直接通信之前预先连接到间接通信。
[0118]
(第二实施方式的变形例1)
[0119]
在上述例子中,作为可能阻断在直接通信中使用的电波的对象,说明了建筑物500和前车c(大型车辆),但不限定于此。例如,可能阻断电波的对象包括山间部。参照图10对山间部进行说明。
[0120]
如图10所示,遮挡物判定部405从地图信息获取山间部601。山间部601存在于车辆a和车辆b的周围。遮挡物判定部405相对于车辆a的行进方向设定与山间部601相切的分界线。在图10所示的场景中,将相对于分界线靠山间部601侧的区域称为遮挡区域。在图10所示的场景中,车辆b存在于遮挡区域。在该情况下,判定为车辆b被山间部601遮挡。车辆b被山间部601遮挡意味着车辆a与车辆b之间的直接通信难以进行。此外,为了使计算高效化,遮挡物判定部405计算与分界线相交的道路上的交点602,在从车辆a观察车辆b存在于比交点602远的地方的情况下,也可以判定为车辆b被遮挡。此外,基于无线频率的衍射效果,例如在its频率(5.9ghz频带)的情况下,分界线的范围约为5度。此外,也可以由传感器102或传感器202检测山间部601。
[0121]
这样,遮挡物判定部405基于从地图信息获取到的信息(山间部601)或者由传感器102或传感器202检测到的物体(山间部601),来确定车辆a与车辆b难以进行直接通信的第一区域(遮挡区域)。由此,遮挡物判定部405能够将从车辆a看来超过了电波所到达的临界
点的区域一律判定为直接通信困难的区域,因此能够减少计算量。
[0122]
此外,在由传感器102或传感器202检测到的范围内包括交叉路口、弯道以及坡度拐点中的任一者的情况下,遮挡物判定部405也可以通过从第一区域中排除以交叉路口、弯道以及坡度拐点中的任一者为基准的规定区域,来确定第二区域。由此,遮挡物判定部405能够将从车辆a看来超过了电波所到达的临界点的区域一律判定为直接通信困难的区域,因此能够减少计算量。
[0123]
(第二实施方式的变形例2)
[0124]
遮挡区域不限定于由山间部601形成的区域。例如,如图11所示,在沿途路径上存在凸型的坡度的情况下也可能形成遮挡区域。
[0125]
在图11所示的场景中,遮挡物判定部405使用地图信息来获取车辆a的位置处的斜度。遮挡部判定部405设定沿着所获取到的斜度的分界线。遮挡部判定部405将已设定的分界线的铅垂方向下侧的区域判定为遮挡区域。在图11所示的场景中,由于车辆b存在于遮挡区域,因此车辆a与车辆b之间难以进行直接通信。此外,与变形例1同样地,分界线的范围为大约5度。
[0126]
(第二实施方式的变形例3)
[0127]
另外,如图12所示,在沿途路径的前方存在坡度的情况下也可能形成遮挡区域。
[0128]
在图12所示的场景中,遮挡物判定部405使用地图信息获取车辆a的位置处的道路基准面。遮挡物判定部405将获取到的道路基准面设定为分界线。遮挡部判定部405将已设定的分界线的铅垂方向下侧的区域判定为遮挡区域。在图12所示的场景中,车辆b存在于遮挡区域,因此车辆a与车辆b之间的直接通信难以进行。此外,与变形例1同样地,分界线的范围为大约5度。
[0129]
(第二实施方式的变形例4)
[0130]
也可能存在遮挡区域由大型车辆形成的情况。
[0131]
如图13所示,在车辆a的前方存在大型车辆c的情况下,遮挡物判定部405根据车辆a的位置和传感器102的检测范围来设定分界线。此外,分界线也可以是形成传感器102的死角的线。遮挡物判定部405将相对于已设定的分界线靠大型车辆c侧的区域判定为遮挡区域。在图13所示的场景中,车辆b存在于遮挡区域,因此车辆a与车辆b之间的直接通信难以进行。此外,与变形例1同样地,分界线的范围为大约5度。
[0132]
(第二实施方式的变形例5)
[0133]
在图7示出的例子中,通过传感器102或传感器202在沿途路径上检测到大型车辆(前车c),但对在沿途路径上的大型车辆的存在进行判定的方法不限定于该方法。例如,遮挡物判定部405也可以在检测到拥堵信息的情况下判断为在沿途路径上存在大型车辆。理由是,在发生了拥堵的情况下明确了大型车辆以统计值的10%~25%左右进行行驶。
[0134]
另外,如图14所示,也可以是,在车辆a和车辆b以低车速行驶的情况下,遮挡物判定部405判断为在沿途路径上存在大型车辆。在此,低车速是指比限制速度低25%以上的速度。但是,在车辆a与车辆b之间存在交叉路口或弯道的情况下,遮挡物判定部405不使用低车速信息,而仅使用拥堵信息。
[0135]
此外,也可以是,车辆b从与车辆a不同的车辆接收位置信息,在该消息内部包含大型车辆信息且在车辆a与车辆b之间存在大型车辆的情况下,遮挡物判定部405判断为在沿
途路径12上存在大型车辆。
[0136]
(第三实施方式)
[0137]
接着,参照图15来说明本发明的第三实施方式。在第三实施方式中,车辆a具备数据生成部112。另外,车辆b具备数据接收部222。对于与第二实施方式重复的结构,引用附图标记并省略其说明。以下,以不同点为中心进行说明。
[0138]
数据生成部112生成要向车辆b发送的数据。在数据生成部112所生成的数据中包含开销(overhead)、含有车辆a的当前的位置信息的车辆信息、传感器数据等。以下,数据生成部112所生成的数据有时表现为消息。在开销中包含消息id、车辆a的固有的临时id、车辆a的认证码等。在车辆信息中,除了包含车辆a的当前的位置信息以外,还包含车辆a的速度信息、与行进方向有关的信息等。传感器数据是由传感器102检测到的数据。在传感器数据中包含其它车辆的识别编号、位置、速度、种类(车型)、高度、行进方向、过去的行驶轨迹、基于过去的行驶轨迹的将来的轨迹等。消息的发送周期没有特别地限定,但是例如被设定为10hz。数据生成部112将所生成的数据输出到通信部100。此外,数据生成部112也可以包含娱乐信息。
[0139]
数据接收部222具有以下功能:预先存储由数据生成部112生成的数据的格式,解释并保存数据。
[0140]
在第三实施方式中,在能够进行直接通信的情况下,车辆a与车辆b进行直接通信。另一方面,在难以进行直接通信的情况下,车辆a与车辆b进行间接通信。在此,对间接通信的一例进行说明。在第三实施方式中,服务器400使用单播通信或广播通信。在单播通信的情况下,移动服务业务商预先准备服务器400,预先访问车辆a的已知的代表ip地址。服务器400通知车辆a通过规定场所(例如,交叉路口)前所需要的时间量的计算资源、车辆a和车辆b的访问信息(电话号码、ip地址、车辆固有的临时id(在v2v通信中使用的id)、认证用代码(公共密钥等)、当前位置信息。移动服务业务商向车辆a发布车辆b能够访问的ip地址和公共密钥等。通过该方式,能够支持仅限于有限用户的信息的发送接收,因此即使在经由服务器400处理广域信息的情况下也能够确保保密性,并且由于使用服务器400的用户被限定,因此易于进行费用征收等。
[0141]
另外,作为间接通信的其它例子,对使用限定了区域的广播通信的情况进行说明。公共交通基础设施业务商预先准备服务器400,预先访问车辆a的已知的代表ip地址。服务器400获取车辆a和车辆b的当前位置、行驶计划信息、能够提供、传送其它的可访问车辆的信息的其它服务器的ip地址、端口编号、认证信息等。关于该方式,由于广泛的用户能够访问,因此能够从各种车辆获得由各车辆判断为能够公开的信息。向车辆a通知这种服务器400的访问信息。
[0142]
接着,参照图16~18所示的流程图,对车辆a、车辆b以及服务器400的动作例进行说明。但是,步骤s301、s305~s323的处理与图4~图5所示的步骤s101、s105~s123所示的处理相同,因此省略说明。
[0143]
由于在步骤s325中判定为在一部分区间内难以进行直接通信,因此处理进入步骤s327。在步骤s327中,服务器400向车辆a和车辆b通知用于与服务器400连接的访问信息。
[0144]
处理进入步骤s329以及s331,车辆a和车辆b基于在s327中获取到的访问信息,向服务器400请求连接。处理进入步骤s333,服务器400受理连接,并向车辆a和车辆b传送必要
的通信用程序。此外,与服务器400连接所需要的通信程序也可以预先被存储在车辆a和车辆b中。另外,服务器400发送和接收测试信号,来确认连接的建立。在确认了连接的建立之后,服务器400成为待机模式。
[0145]
处理进入步骤s335、s337,车辆a和车辆b在能够进行直接通信的区间进行直接通信。在步骤s339、s341中,车辆a和车辆b进行直接通信。在步骤s335、s337、s339、s341之后,处理进入步骤s343。
[0146]
在步骤s343中,服务器400判定车辆a和车辆b是否处于能够进行直接通信的区域。所谓能够进行直接通信的区域,例如是如在第一实施方式中所说明那样接收强度超过阈值的区域。在车辆a和车辆b处于能够进行直接通信的区域的情况下(在步骤s343中为“是”),结束一系列的处理。在车辆a和车辆b不处于能够进行直接通信的区域的情况下(在步骤s343中为“否”),处理进入步骤s345。
[0147]
在步骤s345中,服务器400判定在车辆a的通信部100和车辆b的通信部200中是否观测到直接通信的功率变动低于最小功率的倾向。对于按每10hz测量出的直接通信的功率,当由于通过建筑物等竖立排列的都市峡谷(urban canyon)环境、道路面等产生的多重反射的影响而发生波的互相重叠时,有时会产生驻波。在产生了驻波的情况下,直接通信的功率变动有时低于最小功率。在直接通信的功率变动低于最小功率的情况下,通信的调制率下降,数据通信速率下降,有可能无法完全接收所需要的数据。在直接通信的功率波动低于最小功率的情况下(在步骤s345中为“是”),则处理进入步骤s347,服务器400判定车辆a与车辆b是否进入了难以进行直接通信的区域。所谓能够进行直接通信的区域,例如是如在第一实施方式中所说明那样接收强度为阈值以下的区域。
[0148]
在车辆a和车辆b进入了困难进行直接通信的区域的情况下(在步骤s347中为“是”),服务器400以始终成为连接模式的方式发送测试信号,并判定是否与车辆a及车辆b进行了连接。在服务器400与车辆a及车辆b进行了连接的情况下(在步骤s349中为“是”),处理进入步骤s351,车辆a确认通信部100和通信部200中的哪一方的接收功率量少于10db。此外,10db是一例,不限定于此。车辆a通过直接通信向车辆b发送最低吞吐量(频带为10mhz且每一条消息为300字节左右)。最低吞吐量中包含车辆a的位置信息等最低限度的基本消息。车辆a经由服务器400向车辆b发送剩余的数据。之后,处理进入步骤s353。在通信部100和通信部200的接收功率量为10db以上、接收持续时间持续10秒左右、并且没有估计出在将来的行驶区域内难以进行直接通信的区域的情况下(在步骤s353中为“是”),车辆a和车辆b切换为直接通信。此时,维持与服务器400的连接。
[0149]
(作用和效果)
[0150]
根据第三实施方式,判定将来的通信环境,判定是否能够通过直接通信发送应该发送的数据量。在无法通过直接通信发送应该发送的数据量的情况下,车辆a和车辆b能够在切断直接通信之前预先连接到间接通信。由此,从直接通信切换到间接通信时的初始连接所需要的时间变少,因此能够实现顺畅的数据共享。
[0151]
能够通过1个或多个处理电路来安装上述的实施方式中记载的各功能。处理电路包括含有电路的处理装置等被编程的处理装置。处理电路还包括被布局为执行所记载的功能的面向特定用途的集成电路(asic)、电路部件等装置。
[0152]
如上所述,记载了本发明的实施方式,但不应该理解为构成该公开的一部分的论
述以及附图用于限定本发明。根据该公开,本领域技术人员能够明白各种替代实施方式、实施例以及运用技术。
[0153]
在上述实施例中,由服务器400实施通信环境的判定、通信环境的校正等,但不限定于此。例如,也可以如图19所示那样由车辆a实施通信环境的判定、通信环境的校正的制作等。如图19所示,车辆a的控制器110所具备的将来路径获取部114、位置预测部115、道路信息获取部116、遮挡物判定部117以及通信环境判定部118的各功能与图6所示的将来路径获取部401、位置预测部402、道路信息获取部404、遮挡物判定部405以及通信环境判定部403的各功能相同。
[0154]
也可以是,车辆a校正当前的通信环境,在基于校正后的当前的通信环境判定出车辆a与车辆b之间的将来的通信环境的情况下,车辆a向车辆b发送表示将来的通信环境的信息。另外,车辆a也可以根据所判定出的将来的通信环境,将通信目的地从车辆b切换到其它设备(例如,服务器400)。由此,从直接通信切换到间接通信时的初始连接所需要的时间变少,因此能够实现顺畅的数据共享。
[0155]
此外,通信环境的判定、通信环境的校正等也可以由车辆b实施。或者,通信环境的判定、通信环境的校正等既可以由移动电话网上的移动边缘计算机来实施,也可以由因特网上的服务器来实施。
[0156]
在本实施方式中,在直接通信中使用依据了在移动通信网中使用的通信标准的通信。由此,与制作新的通信标准的情况相比,成本降低。
[0157]
通信环境至少包括接收强度、移动速度以及多重反射中的至少一个特性。
[0158]
附图标记说明
[0159]
100:通信部;101:gps接收机;102:传感器;110:控制器;111:通信控制部;112:数据生成部;114:将来路径获取部;115:位置预测部;116:道路信息获取部;117:遮挡物判定部;118:通信环境判定部;200:通信部;201:gps接收机;202:传感器;220:控制器;221:通信控制部;222:数据接收部;300:基站;310:移动电话网;400:服务器;401:将来路径获取部;402:位置预测部;403:通信环境判定部;404:道路信息获取部;405:遮挡物判定部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1