连网对象的地理定位方法和相关装置与流程
1.本发明涉及在室内和室外对装置进行地理定位的领域。更特别地,本发明涉及对向天线网络传送无线电信号的装置进行地理定位,天线网络具有不均匀的天线密度。
背景技术:
2.使用由扩展卡尔曼滤波器进行滤波的定位技术是已知的,并且此类技术使用发射水平以及信噪比水平。这些技术对于对固定的或变动性较低的对象进行地理定位是有效的,但是似乎不太适用于对移动对象进行定位,诸如例如车载在车辆中的对象。
3.其他定位技术特别适用于进行室内定位,尤其是适用于定位连接到wifi型无线网络的对象。题为“指纹室内定位解决方案的深度学习方法”的文献(l. xiao,2017年)描述了使用此类技术的方法,其基于神经网络并应用于有限范围内的私有网络。此方法不适用于对传送至可能分散的天线的对象进行定位的室外地理定位。
4.专利申请fr3068141描述了使用wifi和lpwan网络的另一种定位方法。此方法对于密集的网格表现良好。
5.最后,存在一种所谓的“指纹”方法,该方法使用包括与对象的实际位置结合的接收信号水平值的数据库。通过与记录在数据库中的接收信号水平值进行比较来估计要定位的对象的位置。根据该方法,将数据库中具有最接近来自要定位的对象的接收信号水平的接收信号水平值的位置视为该对象的位置。因此,该定位会分配已经编在库内的位置,该位置可能与实际位置相距较远。
6.这些方法对于使用密度不均匀的天线网络的定位不是最佳的,并且似乎不太适用于室外地理定位。可以改善这种情况。
技术实现要素:
7.本发明尤其旨在优化向具有不均匀的天线密度的天线网络发射信号的对象的地理定位精度。
8.为此,本发明的目的是提出一种用于在平面中定位对象的方法,对象向位于平面中的多个接收天线发射无线电信号,接收天线各自组合至接收装置,接收装置被配置成递送表示从对象向所述天线的所述信号的传输的至少一个信息,该方法包括学习阶段,该学习阶段包括:
‑ꢀ
i)将空间分割成区域,每个区域包括接收天线中的仅一个,
‑ꢀ
ii)在数据库中,针对平面中的对象的多个已知位置中的每个位置,记录表示从对象向每个天线的所述信号的传输的该至少一个信息、以平面中的坐标的形式的对象的位置、以及区域的标识符,
‑ꢀ
iii)基于记录在数据库中的信息,在必要情况下训练分类器来确定在平面的每个区域中定位对象的可能性,并训练神经网络来确定对象在平面的每个区域中的定位,该方法还包括在平面中对对象进行地理定位的阶段,该地理定位阶段包括:
‑ꢀ
iv)从对象并通过多个天线接收无线电信号,并定义表示从对象向每个天线的信号的传输的至少一个信息,
‑ꢀ
v)通过分类器基于表示对象与每个天线之间的信号传输的所有信息来确定在平面的每个区域中定位对象的可能性,
‑ꢀ
vi)借助于神经网络针对定位可能性最高的区域确定以平面中的坐标的形式的对象的位置。
9.有利地,于是可以首先定义要定位的对象在每个区域中的存在可能性,所述区域是通过分割平面而定义的,然后借助于为此而训练的神经网络来确定以平面中的坐标的形式的对象在该区域中的定位。该两步方法使得能够快速地获得对象在平面中的更精确的定位。
10.另一优点在于以下事实:当区域中的定位可能性的区分度不足而无法“选出”一个区域作为明确具有最高可能性的区域时,可以通过使用分类器来重复确定在每个区域中定位对象的可能性的新的迭代,以提高按区域定义的可能性的精度。
11.根据本发明的定位对象的方法还可以包括单独或组合考虑的以下特征:
‑ꢀ
根据冯洛诺伊图(diagramme de vorono
ï
)基于按接收天线的相应位置在平面中定义的离散点集来将平面分割成区域。
‑ꢀ
根据称为“分水岭线”的分割方法、称为“区域生长”的分割方法、或称为“k均值”的划分方法来将平面分割成区域。
‑ꢀ
分类器使用利用决策树森林的统计学习方法。
‑ꢀ
该方法用于定位连接到电信网络的对象。
12.本发明的另一目的是提出一种用于在平面中定位对象的装置,对象向位于平面中的多个接收天线发射无线电信号,接收天线各自位于平面的包含单个天线的预定义的区域中,并且天线各自组合至接收装置,接收装置被配置成递送表示从对象向所述天线的所述信号的传输的至少一个信息,定位装置包括数据库,所述数据库针对平面中的对象的多个已知位置中的每个位置包括表示从对象向每个天线的所述信号的传输的至少一个信息、以平面中的坐标的形式的对象的位置、以及平面的多个区域中的包括所述位置的区域的标识符,定位装置包括:
‑ꢀ
接收接口,其被配置成接收表示从对象向该多个天线中的每个天线的信号的传输的至少一个信息,
‑ꢀ
分类器,其被配置成基于表示对象与每个天线之间的信号传输的所有信息来确定在平面的每个区域中定位对象的可能性,
‑ꢀ
神经网络,其用于针对定位对象的可能性最高的区域确定以平面中的坐标的形式的对象的位置。
13.根据本发明的定位对象的装置还可以包括单独或组合考虑的以下特征:
‑ꢀ
分类器被配置成实现使用决策树森林的统计学习方法。
‑ꢀ
该装置包括针对被分割的平面的每个区域的神经网络。
‑ꢀ
该一个或多个神经网络通过输入向量的大小和输出向量的大小来表征,并且包括:由m个神经元组成的稠密层,m是与输入向量的大小和输出向量的大小之和的一半相对应的正整数,稠密层是全连接层;50%的dropout层;以及二维输出层。
14.本发明还目的在于一种计算机程序产品,其包括程序代码指令,所述程序代码指令用于在程序由处理器执行时执行前述方法的步骤,本发明还目的在于包括这样的计算机程序产品的信息存储介质。
附图说明
15.通过阅读下面对至少一个实施例的描述,上述发明的特征以及其他特征将更加清楚地显现,所述描述是结合附图进行的,在附图中:图1例示了包括分布在平面中的多个天线的电信网络以及要通过根据本发明的特定且非限制性实施例的定位装置进行定位的对象。
16.图2例示了将已经在图1中示出的平面分割成多个区域,每个区域包括一个天线。
17.图3例示了在图1和图2中已经示出的平面中的一个或多个对象的已知位置,其由根据本发明的装置用来进行学习阶段。
18.图4示出了在每个区域中的一个或多个对象的已知位置的分布,以例示根据本发明的装置的学习阶段。
19.图5是从要定位的对象向平面的每个天线的无线电信号传输的示意性表示。
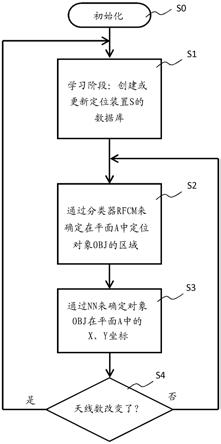
20.图6是示出根据本发明的特定且非限制性的实施例的定位方法的步骤的流程图,该方法在图1所示的定位装置中执行。
21.图7是根据本发明的特定且非限制性的实施例的用于定位对象的装置的内部架构的示意性表示。
具体实施方式
22.图1示出了平面a,其包括使用多个电信天线ant1、ant2、ant3、ant4、ant5和ant6的电信网络n,这些天线被配置成接收从平面a发射的无线电信号、或者被配置成向平面a的任何点发射无线电信号。术语“平面”应解释为平面或准平面空间。于是,平面a可以对应于例如一片土地,诸如一片领土、市镇、一组市镇、省或行政区,这些示例是非限制性的。
23.根据该配置,天线ant1至ant6中的天线不一定覆盖整个平面a,但是天线ant1至ant6共同覆盖整个平面a。在接下来的描述中,不考虑由于起伏或存在障碍物而普遍遇到的干扰和波传播现象,因此认为,每个天线可以从平面a的任何点(也称为位置)接收无线电信号),风险为从天线看到的信号幅度被认为是零,或者无法定义信号到达时间。
24.天线ant1至ant6中的每一个都连接到一个装置,该装置本身连接到电信网络n,使得可以通过连接到天线的连网装置来处理由该天线接收的无线电信号,并且使得表示由天线接收的无线电信号的传输的一个或多个信息可以藉由电信网络n来传输。定位装置s也连接到电信网络n。装置s被配置成对存在于平面a中的对象obj进行定位。对象obj是藉由天线ant1至ant6中的一个或多个天线连接到电信网络n的对象。对象obj例如是智能电话、定位端(borne de localisation)、智能手表、所谓的“智能”电子装置、连网计电表、车辆,这些示例显然不是限制性的。更宽泛地说,对象obj是能够发射可以由天线ant1至ant6中的一个或多个截获的无线电信号的任何对象,无线电信号可以被转换成表示对象obj与接收这些无线电信号的一个或多个天线之间的所述无线电信号的传输的一个或多个信息。根据所描述的示例,六个天线覆盖平面a,并在平面a中具有不均匀的分布密度。
25.装置s被配置成执行根据本发明的方法,该方法包括学习阶段和定位阶段。定位阶段使得能够在学习阶段结束后定位对象obj或类似于对象obj的对象。学习阶段需要将平面a分割成多个区域,也称为单元格。在学习阶段期间,定位装置s在数据库中记录一个或多个特征,其表示从一个或多个对象obj、来自其已知的实际位置的无线电信号的传输。术语“实际位置”应解释为表示借助于测量系统(诸如例如,gps装置)测得的位置,与估计位置相对。对于在学习阶段考虑的对象的给定位置,将所抄录的一个或多个特征与数据库中的实际位置以及表示作为要记录的测量对象的位置(以数据库中的样本的形式)所在的区域的信息相关联。特征数据库优选地包括在定位装置s中。根据一种变型,数据库可以在连接到电信网络n的另一装置中或者在连接到与电信网络n相连的另一网络的另一装置中实现,然而,该定位具有增加额外的处理时间来提供数据库或从定位装置s查询数据库的缺点。
26.图2例示了通过根据冯洛诺伊算法的分割方法将平面a分割成多个区域zone1、zone2、zone3、zone4、zone5和zone6。根据本发明的优选实施例,根据该算法将平面a分割成多个区域。冯洛诺伊图是被分成多个单元格的空间,每个单元格包含一个点,使得每个单元格的每个地方都比其他单元格的任何其他点更靠近处于该单元格中的点。单元格的边界表示距两个点或更多个点等距的地方。于是认为,一个单元格是一个点的作用区域。于是,应用于包括多个天线ant1至ant6的平面a的冯洛诺伊分割方法限定了区域zone1至zone6,每个区域包括一个天线,并且对于这些区域,一个区域的每个地方都比任何其他天线更靠近位于该区域中的天线。选择根据冯洛诺伊算法的分割方法不是限制性的,并且根据变型,可以根据另一种分割或切割方法来进行分割。可以例如根据称为“分水岭线”的分割方法、称为“区域生长”的分割方法、或称为“k均值”的划分方法来将平面分割成区域。
27.实际位置pos
‑
1、pos
‑
2、
…
pos
‑
i、
…
pos
‑
n用于学习阶段。在图3中示出了这n个实际位置,图3中显示出与实际位置一样多的对象obj,其分布在平面a中、在天线ant1至ant6之间。这n个位置可以无差别地对应于同一个对象obj的相继位置或各种类似的对象obj的位置。
28.根据本发明的优选实施例,在学习阶段期间,在数据库中记录表示位于位置pos
‑
i的对象obj与天线ant1至ant6中的每个天线之间的无线电信号传输的两个参数,同时记录位置pos
‑
i的x和y坐标以及位置pos
‑
i所在的平面a的区域的标识符。根据本发明的优选实施例,记录在数据库中的、表示对象obj从实际位置pos
‑
i与ant1至ant6中的一个天线之间的传输的两个参数是rss(英文“received signal strength(接收信号强度)”的首字母缩合词,意为“接收信号水平”)和tdoa(英文“time difference of arrival”的首字母缩合词,意为“到达时间差”),并且x和y是通过gps型定位装置确定的位置pos
‑
i的经度和纬度。pos
‑
i所在的区域是通过将坐标与冯洛诺伊图进行比较来确定的,冯洛诺伊图是基于平面a的形状和天线ant1至ant6在平面a中的位置而计算的。图4例示了实际位置pos
‑
1至pos
‑
n在平面a中的按区域的分布。实际位置pos
‑
1至pos
‑
n分布在根据从平面a的形状和天线ant1至ant6的安装计算出的冯洛诺伊图的区域zone1至zone6中。根据分布,实际位置pos
‑
1和pos
‑
7位于区域zone1中,位置pos
‑
3位于区域zone2中,实际位置pos
‑
2、pos
‑
8、pos
‑
9、pos
‑
10、pos
‑
13、pos
‑
14位于区域zone3中,等等,如图4例示的那样。
29.图5例示了在学习阶段期间定位装置s的数据库中针对位于平面a中的对象obj的位置pos
‑
i的记录。对象obj发射无线电信号,其被天线ant1至ant6中的每个天线接收。于
是,可以通过表示对象obj与天线ant1至ant6中的每个天线之间的无线电信号的传输的信息来表征位置pos
‑
i。被定位至位置pos
‑
i的对象obj向天线ant1之间的电信号发射称为传输ti1。类似地,被定位至位置pos
‑
i的对象obj向天线ant2之间的电信号发射称为ti2。更宽泛地说,被定位至位置pos
‑
i的对象obj向天线antj之间的电信号发射称为传输tij。在学习阶段期间并且针对数据库中实际位置的每个记录,针对每个天线记录测得的rss水平、测得的tdoa、通过gps(英文“global positioning system”的首字母缩合词,意为“全球卫星定位系统”)抄录的x和y坐标、以及包括作为测量对象的位置pos
‑
i的区域的标识符,以便一起构成定位装置s的数据库中的表示传输tij的样本(i是对象位置的下标,并且j是表示天线的下标)。
30.学习阶段包括记录可能在数据库中表示的所有实际位置。于是,对于位置pos
‑
1至pos
‑
n中的每个位置pos
‑
i,根据前述操作模式针对天线ant1至ant6中的每个天线进行记录,并且数据库因此包括n x k个记录,若n是位置数并且k是天线数的话。学习阶段还包括,针对被分割平面a的区域zone1至zone6中的每个区域,在必要的情况下训练分类器rfcm的分类算法,以及训练神经网络nn。在训练这些受监督学习模型(机器学习)期间,所执行的算法建立参数,以最小化针对每个模型的成本函数。该函数使得能够测量所实现的模型的性能。
31.根据本发明的一个实施例,分类器rfcm是静态的并且无需训练即可操作。根据一种变型,分类器rfcm被配置成在训练阶段之后进行操作。
32.图6是例示根据本发明的一个实施例的方法的流程图。
33.初始化步骤s0对应于完整地配置所描述的所有元素,使得这些元素能够联合操作。于是,在步骤s0结束后,一个或多个对象obj被配置成向电信网络n的天线ant1至ant6发射无线电信号,并且定位装置被初始化以进行到学习阶段,随后是在平面a中定位对象obj的一个或多个可能阶段。天线ant1至ant6以及连接到每个天线的装置被配置成接收由位于平面a中的一个或多个对象obj发射的无线电信号。定位装置s被配置成从连接到天线ant1至ant6的每个装置接收表示对象obj与天线ant1至ant6中的一个天线之间的传输的一个或多个信息。于是,连接到天线的装置能够经由电信网络n向定位装置s发送表示来自位于一位置处的对象obj的无线电信号传输的rss的值和tdoa的值,该位置在平面a中、由其经度x和其纬度y来定义。然后在步骤s1中进行学习阶段。在该步骤期间,可基于通过天线ant1至ant6中的一个或多个天线接收到的信息而在电信网络n上和平面a中标识的所有对象obj都构成定位装置s的数据库中的一个或多个记录的对象。在该学习阶段中,记录期间的对象的实际位置通过gps型定位装置来确定。根据本发明的优选实施例,对象obj将其x和y坐标传输给布置在平面a中的天线。根据该实施例的变型,x和y坐标是在测量阶段期间抄录的、并在测量后手动或自动记录在数据库中。在该学习阶段期间,在定位装置s内训练所谓的“机器学习”模型。术语“机器学习”在此应解释为用于从数据中学习的所有方法和统计学。第一机器学习模型是分类模型,也称为分类器,它使得能够在对象obj的定位阶段期间基于表示由对象发射的无线电信号传输的rss和tdoa的值来确定该对象位于被分割平面a的哪个区域中。为此,定位装置s包括实现分类算法的分类器模块rfcm。在定位装置s中实施的第二机器学习模型实现应用于区域的回归,从而使得能够估计对象在平面a中的以x和y坐标的形式的位置。
34.第一机器学习模型定义了对象obj属于一个区域的标准。这是一个模糊的标准。模型的输出是针对区域zone1至zone6中的每个区域定义的属于一个区域的可能性。第一模型实现rfc(英文“random forest classifier(随机森林分类器)”的首字母缩合词,意为“决策树森林”)型分类算法。决策树森林算法对基于略微不同的数据子集而训练的多个决策树进行学习。根据本发明的优选实施例,针对该第一模型,考虑400个决策树,并且在创建新的树之前考虑最少8个样本。此外,树的最大深度为90。定位装置s使用的第二机器学习模型是神经网络,也常称为nn(英文“neural network”的首字母缩合词)。“神经网络”的意思是用于回归和受监督分类的特定的基本对象的图。定位装置s实现与平面a中存在的区域一样多的递归神经网络nn。于是,如果根据冯洛诺伊算法进行分割,则在定位装置s中实现的递归神经网络nn与安装在平面a中的天线一样多。根据所描述的示例,定位装置s使用6个nn。根据本发明的优选实施例,每个nn通过输入向量的大小和输出向量的大小来表征,并且实现:由m个神经元组成的稠密层,m是与输入向量的大小和输出向量的大小之和的一半相对应的正整数,稠密层是全连接层;50%的dropout层;以及二维输出层。根据该实施例的变型,第二模型实现使用多输出回归模型的nn,以便预测作为平面a中的x和y坐标的对象obj的位置。该策略包括使用两个回归子模型,针对x和y目标中的每一个使用一个子模型。一个子模型于是用于估计位于平面a中的对象的x坐标,并且另一子模型用于估计在平面a中的该同一个对象的y坐标。
35.在步骤s1中执行的学习阶段是自适应的且可演进的。在安装或开动新天线时,或者在天线被废除或故障时,都可以重新执行该学习阶段。当天线的数量因此而改变时,必须先进行新的平面a分割,然后再基于数据库中记录的新数据来训练两个机器学习模型。
36.在学习阶段结束后,可以通过使用已经训练好了受监督学习模型的定位装置s来定位位于平面中的任何对象obj。巧妙地并且根据本发明,借助于定位装置s在平面中定位对象obj是以两个步骤进行的。首先在步骤s2中定义要定位的对象obj所在的区域,在步骤s2中,分类器rfcm执行第一机器学习模型,以针对所描述的示例的六个区域中的每个区域获得指示对象obj在该区域中的存在可能性的值。于是认为要定位的对象obj位于其存在可能性的值被确定为最高的区域中。
37.然后,在第二步骤s3中,通过执行由定位装置s实现并与被标识为包括要定位的对象obj的区域相对应的模型nn来就x和y坐标在平面a中精确地定位对象obj。有利地,如果区域zone1至zone6中的两个区域具有区分度很低的存在可能性值,则使用对应于这两个区域的两个神经网络nn,并计算如此确定的两个位置的平均值以确定平面a中的最终坐标x和y(即要定位的对象obj的位置)。
38.根据本发明的优选实施例,定位装置s借助于对象obj向天线ant1至ant6传输的唯一标识符来标识要定位的对象。从对象obj传输的无线电信号编码表示该对象的信息、并且在必要的情况下编码表示其用途的信息。例如,如果对象obj是智能电话,则除了编码语音的信息之外,还在以无线电信号形式编码的信息中传输智能电话或所订阅的电话服务的唯一标识符。信息以数据帧的形式汇集,随后可以由与通信网络n和定位装置s兼容的任何装置来处理。
39.于是,当定位装置s的用户希望定位对象obj时,他通过配置定位装置s来提供对象obj的唯一标识符,使得由这样标识的对象obj发射的所有数据都可由定位装置s分析。分别
连接到天线ant1至ant6的装置将接收到的无线电信号转换成数据帧,然后将其传输给定位装置s。可以通过传统上用于此的任何方式来进行对定位装置s的配置,诸如例如借助于连接到定位装置s或集成到定位装置s的终端而实现的用户接口。
40.在定位对象obj的操作结束后,验证网络中使用的天线数是否恒定。通过扫描在电信网络n上流转的帧来进行该验证。如果天线数例如因添加或撤销天线、在维修之后、或因发生故障而发生变化,则进行新的学习阶段(返回步骤s1)。否则,可以发起用于定位对象obj的新操作(返回步骤s2)。
41.图7例示了实现前述定位方法的在平面a中定位对象obj的定位装置s的内部架构。定位装置s包括:控制单元uc;用于存储配置参数和可执行软件代码的非易失性存储器模块ro;用于可由控制单元uc执行的软件代码的执行的易失性存储器模块ra;被配置成实现数据库posdb的存储器模块;多个神经网络模块nn;分类器模块rfcm;以及被配置成藉由连接端口ifn而连接到电信网络n的网络通信接口if1。通信接口if1被配置成连接到广域网,并且包括“桥”型互连装置。根据该实施例的变型,接口if1可以是无线类型的并且包括天线系统。连接到电信网络n的连接接口if1使得能够从和向连接到天线ant1至ant6中的每个天线的装置传递数据。定位装置s的内部模块通过由控制单元uc管理的公共控制/命令/数据总线b而连接在一起。控制单元uc还包括适用于连接外部配置和可视化终端的接口terif,其包括例如屏幕和键盘。定位装置s还包括常用于控制单元的运转的任何模块,作为示例比如电源、具有馈电线监管的电源接口电路、复位电路、一个或多个时钟电路、输入输出端口、中断端口、总线管理缓冲器。此列表不是穷举列表。
42.在学习阶段中,表示位于平面a的位置pos
‑
i的对象obj与天线ant1至ant6中的天线anti之间的传输tij的rss和tdoa信息以及该对象obj在平面a中的x坐标和y坐标是通过接口if1接收的,接口if1经由连接端口ifn连接到电信网络n。这些信息然后在控制单元uc的控制下记录在数据库模块posdb中。根据该实施例的变型,随后藉由用户接口、存储卡读取器或任何其他部件来记录与作为测量对象以记录在数据库posdb中的位置相对应的x和y坐标。当所有信息以样本形式输入到数据库posdb中时,在控制单元uc的控制下训练受监督的学习模型或机器学习模型,控制单元uc与用于分类器的模块rfcm和神经网络nn联合地执行对应的算法。于是,在大量输入/输出对上进行的学习使得能够掌握针对已知位置的大量rss和tdoa值,并摆脱由于环境而引起的有噪声或异常的rss和tdoa值。
43.在定位装置s对对象obj进行地理定位的阶段期间,并且在定位装置的用户提供了要定位的对象obj的标识符之后,通信接口if1过滤在电信网络n上流转的信息,并将来自要定位的对象obj的全部或部分帧传送到控制单元uc,控制单元uc对其进行分析并提取来自对象obj且目的地为各天线ant1至ant6的rss和tdoa信息。表示要定位的对象obj与天线ant1至ant6之间的传输的这些信息被传输到分类器模块rfcm,该模块基于记录在数据库posdb中的数据进行回归,从而定义对象obj在区域zone1至zone6中的每个区域中的存在可能性的值。然后,控制单元uc分析这些值并标识区域zone1至zone6中的存在可能性的值在所有计算出的值中最高的区域。然后,控制单元执行与该区域相对应的神经网络nn的算法,以定义该对象在平面a中的x和y坐标。这些坐标然后被传输到连接到接口terif的终端,以用于显示和/或记录。然后,可以针对同一对象obj或平面a中存在的类似对象obj发起新的定位过程。
44.本发明不限于所描述的仅这些实施例,而是旨在在平面中定位对象的任何方法,所述方法包括用于提供数据库的称为学习阶段的第一阶段和称为定位阶段的第二阶段,定位阶段使用基于数据库来操作的分类器,所述数据库包括表示对象与接收天线之间的信号传输的信息,以确定对象在平面的区域中的定位可能性,定位阶段还使用神经网络来针对平面的定位可能性最高的区域确定以平面中的坐标的形式的对象的位置。本发明还涉及实现该方法的定位装置以及实施该方法的计算机程序和包括这样的程序的存储装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1