一种用于移动激光通信设备伺服稳定系统的视轴稳定方法与流程
1.本发明涉及无线激光通信技术,具体是一种用于移动激光通信设备伺服稳定系统的视轴稳定方法。
背景技术:
2.近地移动激光通信设备通常搭载在车辆、舰船、飞机等移动平台上实现“动中通”,为了克服外界环境干扰造成激光通信设备接收光功率抖动甚至无光,设备常使用二维伺服稳定系统来隔离干扰。随着通信环境向大容量、长距离、移动平台多样化变化,移动激光通信设备对二维伺服稳定系统提出了更高的抗湍流、抗雨雾、抗平台振动的稳定性要求,一般动态跟踪时的视轴稳定精度需达到微弧度量级。
3.移动激光通信设备伺服稳定系统主要由激光通信天线部分和伺服稳定系统组成。激光通信天线部分主要包含信标光的发射部分、粗跟踪ccd传感器部分、信号光通信部分等,伺服稳定系统部分主要由俯仰和方位电机、俯仰和方位的旋转变压器、滑环、以及陀螺仪组成等。
4.当前的移动激光通信设备伺服稳定系统的视轴稳定常使用多种闭环跟踪方法来稳定,如功率跟踪优化方法、四象限探测器跟踪优化方法、ccd相机跟踪优化方法、以及伺服系统闭环算法优化方法。功率跟踪方法本身功率跳动大,稳定性不够,视轴稳定效果不佳,且精度不高,适用于静止平台的激光通信视轴稳定;四象限探测器由于其线性度不好,容易给两轴跟踪带来耦合误差,造成系统稳定效果差;ccd相机其线性度较好,但是在湍流和雨雾天气较大时,信标光闪烁严重,ccd相机获取信标光的坐标跳跃较大,会引起视轴的不稳定;伺服系统闭环算法优化方法可以增加伺服系统自身的稳定性,但是伺服系统中的陀螺仪机械安装误差、零漂、温漂对系统时候稳定性有一定影响。
技术实现要素:
5.本发明目的是针对现有技术得不足,而提供一种用于移动激光通信设备伺服稳定系统的视轴稳定方法。这种方法能稳定系统视轴、提高系统的线性度、减少系统各轴系之间的耦合误差,增强系统的抗扰动能力和跟踪精度。
6.实现本发明目的的技术方案是:
7.一种用于移动激光通信设备伺服稳定系统的视轴稳定方法,包括如下步骤:
8.1)对陀螺仪安装校正优化:将陀螺仪刚性固定在伺服稳定系统上后,陀螺仪y轴输出的角速度为系统俯仰的角速度,陀螺仪x轴与z轴合成输出的角速度为系统方位的角速度,移动激光通信设备伺服稳定系统的三轴陀螺仪安装存在偏差时,运动过程中陀螺仪单轴运动会耦合到另外两个轴上,从而影响二维伺服系统瞄准视轴的稳定,因此,采用对移动激光通信设备伺服稳定系统的三轴陀螺仪安装标定来减少各个轴之间耦合效应,过程为:
[0009]1‑
1)旋转二维伺服稳定系统俯仰轴,使陀螺仪的x轴与二维伺服稳定系统方位轴保持平行、陀螺仪的y轴、z轴与方位轴保持正交;
[0010]1‑
2)给方位电机假定一个恒定角速度旋转,二维伺服稳定系统方位轴按照指定的恒定角速度旋转,陀螺仪x轴反馈的角速度值接近于假定恒定角速度值,陀螺仪y轴、z轴反馈接近于0时,记录下陀螺仪x轴、y轴、z轴的反馈数据;
[0011]1‑
3)结合步骤1
‑
2),假定采用不同的恒定角速度旋转,分别记录不同角速度下的陀螺仪三轴反馈值,如:10
°
/s,20
°
/s,40
°
/s,80
°
/s,100
°
/s,120
°
/s,160
°
/s,200
°
/s的给定值,假定数值越多,标定越准确;
[0012]1‑
4)采用最小二乘法拟合得到假定角速度与陀螺仪各个轴输出的角速度的校准系数a
x
、a
y
、a
z
;
[0013]1‑
5)旋转二维伺服稳定系统俯仰轴,使陀螺仪的z轴与方位轴保持平行,x轴、y轴与方位轴保持正交,重复步骤1
‑
2)
‑
步骤1
‑
3),记录陀螺仪z轴、x轴和y轴的反馈数据,同时计算出校准系数b
x
、b
y
、b
z
;
[0014]1‑
6)固定方位轴,给俯仰电机假定一个恒定角速度旋转,采用同上所述方法记录多组陀螺仪的y轴、x轴和z轴的反馈数据,同时计算出校准系数c
x
、c
y
、c
z
;
[0015]1‑
7)依据步骤1
‑
4)
‑
步骤1
‑
6)获得的三组的校准系数,得到标定函数矩阵,即可消除相应的安装误差,标定矩阵函数如公式(1)所示:
[0016][0017]
其中,ω
x
、ω
y
、ω
z
是校准后的陀螺仪三轴角速度,是是校准前的陀螺仪三轴角速度;
[0018]1‑
8)将标定矩阵函数以程序的形式写入到嵌入式芯片中,消除安装带来的误差;
[0019]
2)ccd质心算法优化过程:无线激光通信采用ccd来捕捉信标光来实现粗跟踪,ccd上探测到信标光由m个像素点组成,且这m个像素点都满足i(x
i
,y
i
)光强阈值,但是受大气信道各种外界因素的影响如湍流,ccd捕获的信标光会出现光斑不圆滑、过度曝光或光强度减弱、光斑内出现随机的黑斑,同时整个光斑随机跳跃等现象,最终ccd输出的跟踪坐标在随机的大范围跳动,对跟踪的稳定性造成的严重影响,为了尽量减少大气信道带来的跟踪不稳定,在获取ccd成像图像后,将m个像素点进行质心算法运算来压缩信标光坐标的跳跃,获得优化后信标光x坐标、优化后信标光y的坐标,质心坐标算法如公式(2)所示:
[0020][0021]
其中i(x
i
,y
i
)为ccd图像上的每一个像素点所接收到的光强,x
i
、y
i
分别表示对应像素超出光强阈值的x,y坐标值,i表示第几个像素点处于曝光状态,n表示总共有多少个点
处于曝光状态,质心坐标算法过程为:
[0022]2‑
1)将所有超过ccd像素光强阈值的光强值乘以此像素点坐标值,然后统计相加;
[0023]2‑
2)将所有超过阈值ccd像素点的光强值相加;
[0024]2‑
3)将步骤2
‑
1)得到的值与步骤2
‑
2)得到的值相除得到稳定坐标值,经过如上的算法处理,同时加上低通滤波后,在同样的实验条件下,ccd两轴坐标跳动可得到明显的改善;
[0025]
3)同向小值快速收敛过程:由于设备搭载平台随时在移动,二维伺服稳定系统中陀螺仪采集到的角速度数据也在随时变化,在闭环控制条件下,陀螺仪与ccd采集到的数据都会关系到系统瞄准视轴的稳定性,步骤1)和步骤2)将陀螺仪反馈的数据和ccd数据进行优化,为第三步算法进行铺垫,如果陀螺仪与ccd数据矢量方向往一个方向叠加,两个数据在此时刻都对激光通信的视轴带来偏差,则对两个数据值进行判断,如果陀螺仪对视轴影响大时,即陀螺仪的数值大于ccd的数值,需要采取将ccd数据进行快速收敛,收敛的方法为ccd值按比例快速收敛减少,减少信标光跳跃带来的视轴偏差;反之ccd数据对视轴影响大时,需要采取将陀螺仪数据进行按比例快速收敛减少,让系统的视轴快速地恢复到稳定状态。
[0026]
为了克服搭载平台扰动,稳定激光通信系统的通信视轴,系统处于稳定跟踪闭环状态,ccd传感器获取信标光偏移的坐标与陀螺仪输出的角速度比较后的数值与二维伺服电机构成无线激光通信的粗级跟踪闭环控制系统,二维伺服稳定系统在跟踪的过程受ccd数据、陀螺仪数据相互影响,因此,对ccd数据、陀螺仪数据进行算法优化实现二维伺服稳定系统的视轴稳定。
[0027]
这种方法能稳定系统视轴、提高系统的线性度、减少系统各轴系之间的耦合误差,增强系统的抗扰动能力和跟踪精度。
附图说明
[0028]
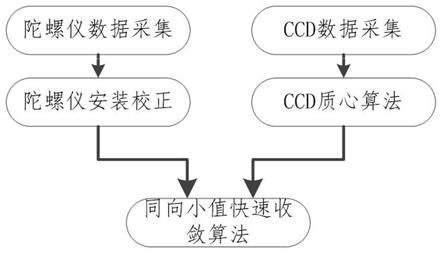
图1为实施例的方法流程示意图。
具体实施方式
[0029]
下面结合附图和实施例对本发明的内容作进一步的阐述,但不是对本发明的限定。
[0030]
实施例:
[0031]
参照图1,一种用于移动激光通信设备伺服稳定系统的视轴稳定方法,包括如下步骤:
[0032]
1)对陀螺仪安装校正优化:将陀螺仪刚性固定在伺服稳定系统上后,陀螺仪y轴输出的角速度为系统俯仰的角速度,陀螺仪x轴与z轴合成输出的角速度为系统方位的角速度,移动激光通信设备伺服稳定系统的三轴陀螺仪安装存在偏差时,运动过程中陀螺仪单轴运动会耦合到另外两个轴上,从而影响二维伺服系统瞄准视轴的稳定,因此,采用对移动激光通信设备伺服稳定系统的三轴陀螺仪安装标定来减少各个轴之间耦合效应,过程为:
[0033]1‑
1)旋转二维伺服稳定系统俯仰轴,使陀螺仪的x轴与二维伺服稳定系统方位轴保持平行、陀螺仪的y轴、z轴与方位轴保持正交;
[0034]1‑
2)给方位电机假定一个恒定角速度旋转,二维伺服稳定系统方位轴按照指定的恒定角速度旋转,陀螺仪x轴反馈的角速度值接近于假定恒定角速度值,陀螺仪y轴、z轴反馈接近于0时,记录下陀螺仪x轴、y轴、z轴的反馈数据;
[0035]1‑
3)结合步骤1
‑
2),假定采用不同的恒定角速度旋转,分别记录不同角速度下的陀螺仪三轴反馈值,如:10
°
/s,20
°
/s,40
°
/s,80
°
/s,100
°
/s,120
°
/s,160
°
/s,200
°
/s的给定值,假定数值越多,标定越准确;
[0036]1‑
4)采用最小二乘法拟合得到假定角速度与陀螺仪各个轴输出的角速度的校准系数a
x
、a
y
、a
z
;
[0037]1‑
5)旋转二维伺服稳定系统俯仰轴,使陀螺仪的z轴与方位轴保持平行,x轴、y轴与方位轴保持正交,重复步骤1
‑
2)
‑
步骤1
‑
3),记录陀螺仪z轴、x轴和y轴的反馈数据,同时计算出校准系数b
x
、b
y
、b
z
;
[0038]1‑
6)固定方位轴,给俯仰电机假定一个恒定角速度旋转,采用同上所述方法记录多组陀螺仪的y轴、x轴和z轴的反馈数据,同时计算出校准系数c
x
、c
y
、c
z
;
[0039]1‑
7)依据步骤1
‑
4)
‑
步骤1
‑
6)获得的三组的校准系数,得到标定函数矩阵,即可消除相应的安装误差,标定矩阵函数如公式(1)所示:
[0040][0041]
其中,ω
x
、ω
y
、ω
z
是校准后的陀螺仪三轴角速度,是是校准前的陀螺仪三轴角速度;
[0042]1‑
8)将标定矩阵函数以程序的形式写入到嵌入式芯片中,消除安装带来的误差;
[0043]
本例中,将方位电机保持不变,将俯仰电机给定不同运行速度,如:10
°
/s,20
°
/s,40
°
/s,80
°
/s,100
°
/s,120
°
/s,160
°
/s,200
°
/s,分别获得陀螺仪的x轴以及z轴的耦合角速度;同理,给定x轴的速度,获取y轴和z轴的耦合角速度;给定z轴的角速度,获取x轴和y轴的耦合角速度;
[0044]
2)ccd质心算法优化过程:无线激光通信采用ccd来捕捉信标光来实现粗跟踪,ccd上探测到信标光由m个像素点组成,且这m个像素点都满足i(x
i
,y
i
)光强阈值,但是受大气信道各种外界因素的影响如湍流,ccd捕获的信标光会出现光斑不圆滑、过度曝光或光强度减弱、光斑内出现随机的黑斑,同时整个光斑随机跳跃等现象,最终ccd输出的跟踪坐标在随机的大范围跳动,对跟踪的稳定性造成的严重影响,为了尽量减少大气信道带来的跟踪不稳定,在获取ccd成像图像后,将m个像素点进行质心算法运算来压缩信标光坐标的跳跃,获得优化后信标光x坐标、优化后信标光y的坐标,质心坐标算法如公式(2)所示:
[0045][0046]
其中i(x
i
,y
i
)为ccd图像上的每一个像素点所接收到的光强,x
i
、y
i
分别表示对应像素超出光强阈值的x,y坐标值,i表示第几个像素点处于曝光状态,n表示总共有多少个点处于曝光状态,质心坐标算法过程为:
[0047]2‑
1)将所有超过ccd像素光强阈值的光强值乘以此像素点坐标值,然后统计相加;
[0048]2‑
2)将所有超过阈值ccd像素点的光强值相加;
[0049]2‑
3)将步骤2
‑
1)得到的值与步骤2
‑
2)得到的值相除得到稳定坐标值,经过如上的算法处理,同时加上低通滤波后,在同样的实验条件下,ccd两轴坐标跳动可得到明显的改善;
[0050]
3)同向小值快速收敛过程:由于设备搭载平台随时在移动,二维伺服稳定系统中陀螺仪采集到的角速度数据也在随时变化,在闭环控制条件下,陀螺仪与ccd采集到的数据都会关系到系统瞄准视轴的稳定性,步骤1)和步骤2)将陀螺仪反馈的数据和ccd数据进行优化,为第三步算法进行铺垫,如果陀螺仪与ccd数据矢量方向往一个方向叠加,两个数据在此时刻都对激光通信的视轴带来偏差,则对两个数据值进行判断,如果陀螺仪对视轴影响大时,即陀螺仪的数值大于ccd的数值,需要采取将ccd数据进行快速收敛,收敛的方法为ccd值按比例快速收敛减少,减少信标光跳跃带来的视轴偏差;反之ccd数据对视轴影响大时,需要采取将陀螺仪数据进行按比例快速收敛减少,让系统的视轴快速地恢复到稳定状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1