一种云台相机、云台装置及无人飞行器的制作方法
1.本发明实施例属于云台相机技术领域,尤其涉及一种云台相机以及采用该云台相机的云台装置和无人飞行器。
背景技术:
2.云台相机通过云台安装在无人飞行器上,可用于无人飞行器航拍或者特殊场景下的目标追踪和监控等,在无人飞行器飞行过程中云台相机能够提供稳定清晰的画面;然而现有的云台相机存在应用场景单一、采集的图像类型单一的问题,其能满足的用户需求有限,通用性差。
技术实现要素:
3.为了解决现有的云台相机存在的应用场景单一、采集的图像类型单一的问题,本发明实施例提供一种新型的云台相机,以提高云台相机多场景应用的能力,更大限度地满足用户对多场景应用和多类型数据采集的需求;此外,本发明实施例还提供采用该云台相机的云台装置和无人飞行器。
4.一方面,本发明实施例提供一种云台相机,应用于无人飞行器,所述云台相机的机身包括安装面和连接面,所述连接面上设置有云台连接件,用于与云台连接;所述云台相机包括第一图像采集部和第二图像采集部,所述第一图像采集部和第二图像采集部设置在所述安装面上,所述第一图像采集部和所述第二图像采集部分别配合所述云台相机的机身内部相对应的图像传感器完成图像采集,以输出两路图像。
5.本发明实施例提供的云台相机设置有两个图像采集部,这两个图像采集部可以配置成独立工作也可以配置成分工合作,通过赋予这两个图像采集部不同的结构和功能,使得所述云台相机可以在不同的场景下进行图像采集,大大提升了云台相机的应用范围,同时采集的图像内容更加丰富和全面,能够更大程度上满足用户的需求。
6.另一方面,本发明实施例还提供一种云台装置,包括云台和上述的云台相机,所述云台包括第一轴臂、第二轴臂、俯仰组件和横滚组件;其中,所述第一轴臂的一端通过所述横滚组件和所述第二轴臂连接,所述第二轴臂的一端通过所述俯仰组件连接至所述云台相机的云台连接件;所述俯仰组件包括俯仰电机,用于驱动所述云台相机转动;所述横滚组件包括横滚电机,用于驱动所述第二轴臂、所述俯仰组件和所述云台相机整体转动。
7.另一方面,本发明实施例还提供一种无人飞行器,包括无人飞行器机体和云台装置,所述云台装置包括云台和上述的云台相机,所述云台包括第一轴臂、第二轴臂、俯仰组件和横滚组件;其中,所述第一轴臂的一端通过所述横滚组件和所述第二轴臂连接,所述第二轴臂的一端通过所述俯仰组件连接至所述云台相机的云台连接件,所述第一轴臂的另一端固定在所述无人飞行器机体上;所述俯仰组件包括俯仰电机,用于驱动所述云台相机转动;所述横滚组件包括横滚电机,用于驱动所述第二轴臂、所述俯仰组件和所述云台相机整体转动。
8.根据本发明实施例提供的云台装置和无人飞行器,一方面,其采用的云台相机设置有两个图像采集部,这两个图像采集部可以配置成独立工作也可以配置成分工合作,通过赋予这两个图像采集部不同的结构和功能,使得所述云台相机可以在不同的场景下进行图像采集,大大提升了应用范围,同时采集的图像内容更加丰富和全面,能够更大程度上满足用户的需求,另一方面,其采用的云台采用双轴臂与俯仰组件、横滚组件交替连接形式,结构简单,可实现多级运动控制,其稳定性更高。
附图说明
9.为了更清楚地说明本发明或现有技术中的方案,下面将对实施例或现有技术描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
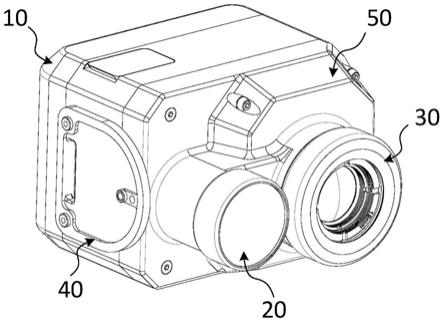
10.图1为本发明实施例提供的云台相机的结构示意图;
11.图2为图1提供的云台相机的机身结构示意图;
12.图3为本发明实施例提供的第一图像采集部和第二图像采集部设置在云台相机的机身上的示意图;
13.图4为本发明实施例提供的云台连接件的结构示意图;
14.图5为本发明实施例提供的云台装置的结构示意图;
15.图6为本发明实施例提供的云台的结构示意图;
16.图7为本发明实施例提供的无人飞行器的结构示意图。
17.附图标记说明:
18.10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机身
19.11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安装面
20.111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一固定孔
21.112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储卡安装槽
22.12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接面
23.121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二固定孔
24.122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数据接口
25.20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一图像采集部
26.30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二图像采集部
27.40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
云台连接件
28.41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接架
29.411
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
固定部
30.412
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
限位部
31.50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
镜头固定件
[0032]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
无人飞行器机体
[0033]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
云台装置
[0034]
100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
云台相机
[0035]
200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
云台
[0036]
210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一轴臂
[0037]
220
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二轴臂
[0038]
230
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横滚组件
[0039]
231
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横滚电机
[0040]
240
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
俯仰组件
[0041]
241
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
俯仰电机
[0042]
250
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏航组件
具体实施方式
[0043]
为了使本技术领域的人员更好地理解本发明方案,下面对本发明实施例中的技术方案进行清楚、完整地描述。除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0044]
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
[0045]
请参阅图1,图1为本发明实施例提供的一种云台相机,该云台相机可应用于无人飞行器,该云台相机包括机身10和设置在机身10上的第一图像采集部20、第二图像采集部30和云台连接件40;进一步参阅图2,其中云台相机的机身10包括安装面11和连接面12,云台连接件40设置在连接面12上,云台相机通过云台连接件40连接至云台,而第一图像采集部20和第二图像采集部30设置在安装面11上,第一图像采集部20和第二图像采集部30分别配合云台相机的机身10内部相对应的图像传感器完成图像采集,以输出两路图像。
[0046]
在本发明实施例中,第一图像采集部20和第二图像采集部30设置于云台相机的机身10的同一安装面11上,其中第一图像采集部20和第二图像采集部30可以并列设置,也可以分开独立设置,比如图1所示即为第一图像采集部20和第二图像采集部30并列设置于云台相机的机身10的同一安装面11上的情形,在具体的实施例中,第一图像采集部20和第二图像采集部30可以在同一安装面11内横向设置,也可以在同一安装面11内纵向设置,或者还可以在同一安装面11内斜向设置;参阅图3,图3中(a)、(c)、(e)、(g)为第一图像采集部20和第二图像采集部30在同一安装面11内并列设置的情形,图3中(b)、(d)、(f)、(h)为第一图像采集部20和第二图像采集部30在同一安装面11内分开独立设置的情形,其中(a)为第一图像采集部20和第二图像采集部30在同一安装面11内横向并列设置的示意图,(c)为第一图像采集部20和第二图像采集部30在同一安装面11内纵向并列设置的示意图,(e)和(g)为第一图像采集部20和第二图像采集部30在同一安装面11内斜向并列设置的示意图,而(b)为第一图像采集部20和第二图像采集部30在同一安装面11内横向分开独立设置的示意图,(d)为第一图像采集部20和第二图像采集部30在同一安装面11内纵向分开独立设置的示意图,(f)和(h)为第一图像采集部20和第二图像采集部30在同一安装面11内斜向分开独立设置的示意图。
[0047]
在本发明另一实施例中,第一图像采集部20和第二图像采集部30设置于云台相机
的机身10不同的安装面11上,重新参阅图2,云台相机的机身10包括两个相邻的安装面11,第一图像采集部20和第二图像采集部30可以分别装设在这两个相邻的安装面11上,当然,在其他实施例中,云台相机的机身10可以包括两个相对的安装面11,第一图像采集部20和第二图像采集部30可以分别装设在两个相对的安装面11上。
[0048]
在上述实施例中,第一图像采集部20和第二图像采集部30可分别独立拆卸;在另一些实施例中,第一图像采集部20和第二图像采集部30也可以为一体结构,第一图像采集部20和第二图像采集部30作为一个整体可拆卸地设置于云台相机的机身10的安装面11上。
[0049]
在本发明实施例中,云台相机的机身10设置有第一图像采集部20和第二图像采集部30的安装面11上还设置有镜头固定件50,在一些实施例中,第一图像采集部20和第二图像采集部30分别对应独立的镜头固定件50,以满足第一图像采集部20和第二图像采集部30独立固定的需求;在另一些实施例中,镜头固定件50设置有两个镜头固定部(图未标识),该两个镜头固定部分别固定第一图像采集部20和第二图像采集部30。
[0050]
进一步地,镜头固定件50还包括固定位(图未标识),通过该固定位使得镜头固定件50能够固定在云台相机的机身10的安装面11上,具体的,该固定位可以是螺孔或者卡扣结构,使得镜头固定件50可通过螺丝固定的方式或者卡扣的方式固定在云台相机的机身10的安装面11上,相应的,在云台相机的机身10的安装面11上设置有与之配合的固定孔或者卡扣结构,如图2所示在云台相机的机身10的安装面11上设置有安装镜头固定件50的第一固定孔111,第一固定孔111的数量可根据需要自由设定。
[0051]
在本发明实施例中,重新参阅图2,云台相机的机身10的安装面11上还设置有存储卡安装槽112,该存储卡安装槽112可以和第一图像采集部20、第二图像采集部30设置在同一个安装面11上,也可以和第一图像采集部20、第二图像采集部30安装在不同的安装面11上,比如图1所示第一图像采集部20和第二图像采集部30所在的安装面11与图2所示存储卡安装槽112所在的安装面11相邻。
[0052]
在本发明实施例中,云台相机的机身10的形状可以是方体或者柱体或者类球体。
[0053]
在本发明实施例中,云台连接件40与云台相机的机身10为一体结构。
[0054]
在本发明的另一些实施例中,云台连接件40可拆卸地固定在连接面12上,如图4所示,云台连接件40包括马蹄形的连接架41,以及设置在连接架41上的固定部411以及限位部412,固定部411用于云台连接件40在云台相机的机身10的连接面12的安装固定,同样的,该固定部411可以是螺孔或者卡扣结构,使得云台连接件40可通过螺丝固定的方式或者卡扣的方式固定在云台相机的机身10的连接面12上,相应的,在云台相机的机身10的连接面12上设置有与之配合的固定孔或者卡扣结构,如图2所示在云台相机的机身10的连接面12上设置有安装云台连接件40的第二固定孔121,第二固定孔121的数量可根据需要自由设定;而限位部412用于云台与云台连接件40的连接限位,以保证云台与云台相机连接的稳定性。
[0055]
可选的,云台相机的机身10的连接面12包括相对的第一连接面和第二连接面,在第一连接面和第二连接面上均设置有云台连接件40,云台同时与第一连接面和第二连接面上的云台连接件40连接,可以理解,在第一连接面和第二连接面上可设置同样的云台连接件40,也可以设置不同结构的云台连接件40,比如在第一连接面设置图4所示的云台连接件40,而在第二连接面上仅设置一轴孔,诸如此类,在此不再展开说明。
[0056]
在本发明实施例中,重新参阅图2,云台相机的机身10的连接面12上还设置有数据
接口122,云台相机安装在云台上时,数据接口122与云台上对应的接口连接,以向与云台连接的无人飞行器传输云台相机采集的图像数据。
[0057]
在上述实施例中,第一图像采集部20和第二图像采集部30可以是红外热成像镜头和可见光镜头中的一种或者两种,即可以是第一图像采集部20为红外热成像镜头,第二图像采集部30为可见光镜头,或者第一图像采集部20和第二图像采集部30均为可见光镜头,或者第一图像采集部20和第二图像采集部30均为红外热成像镜头;其中,对于第一图像采集部20为红外热成像镜头,第二图像采集部30为可见光镜头的情形,采用该云台相机的无人飞行器既可以在日间飞行进行航拍,也可以在夜间飞行进行航拍,满足多场景拍摄需求,同时还可以采集不同类型的图像,满足多样化图像的采集需求;对于第一图像采集部20和第二图像采集部30均为可见光镜头的情形,在光线良好的环境下,可以在不同方向上进行图像采集,也可以只启用其中一个而进行单方向的图像采集,这样可实现多场景拍摄和多样化图像采集的需求;对于第一图像采集部20和第二图像采集部30均为红外热成像镜头的情形,在光线较差的环境下,可以在不同方向上进行红外图像采集,也可以只启用其中一个而进行单方向的红外图像采集,同样实现了多场景拍摄和多样化图像采集的需求;在其他实施例中,还可将第一图像采集部20和第二图像采集部30采集的两路图像视频进行图像融合或者进行画中画显示,提供新型的图像显示内容。
[0058]
本发明实施例提供的云台相机相对于现有的云台相机存在如下优点:
[0059]
本发明实施例提供的云台相机设置有两个图像采集部,这两个图像采集部可以配置成独立工作也可以配置成分工合作,通过赋予这两个图像采集部不同的结构和功能,使得所述云台相机可以在不同的场景下进行图像采集,大大提升了云台相机的应用范围,同时采集的图像内容更加丰富和全面,能够更大程度上满足用户的需求。
[0060]
本发明实施例还提供一种云台装置,参阅图5和图6,云台装置包括云台相机100和云台200,云台200包括第一轴臂210、第二轴臂220、横滚组件230和俯仰组件240,第一轴臂210的一端通过横滚组件230和第二轴臂220连接,第二轴臂220的一端通过俯仰组件240连接至云台相机100的云台连接件40;俯仰组件240包括俯仰电机241,用于驱动云台相机100转动;横滚组件230包括横滚电机231,用于驱动第二轴臂220、俯仰组件240和云台相机100整体转动。
[0061]
云台装置还包括偏航组件250,第一轴臂210的另一端连接偏航组件250,偏航组件250包括偏航电机(图未标识),用于驱动第一轴臂210、横滚组件230、第二轴臂220、俯仰组件240和云台相机100整体转动。
[0062]
其中,云台相机100为上述实施例所述的云台相机100,重新参阅图1至图4,云台相机100包括机身10和设置在机身10上的第一图像采集部20、第二图像采集部30和云台200连接件40;进一步地,云台相机100的机身10包括安装面11和连接面12,云台200连接件40设置在连接面12上,云台相机100通过云台200连接件40连接至云台200,而第一图像采集部20和第二图像采集部30设置在安装面11上,第一图像采集部20和第二图像采集部30分别配合云台相机100的机身10内部相对应的图像传感器完成图像采集,以输出两路图像。
[0063]
在本发明实施例中,第一图像采集部20和第二图像采集部30设置于云台相机100的机身10的同一安装面11上,其中第一图像采集部20和第二图像采集部30可以并列设置,也可以分开独立设置,比如图1所示即为第一图像采集部20和第二图像采集部30并列设置
于云台相机100的机身10的同一安装面11上的情形,在具体的实施例中,第一图像采集部20和第二图像采集部30可以在同一安装面11内横向设置,也可以在同一安装面11内纵向设置,或者还可以在同一安装面11内斜向设置;
[0064]
在本发明另一实施例中,第一图像采集部20和第二图像采集部30设置于云台相机100的机身10不同的安装面11上,重新参阅图2,云台相机100的机身10包括两个相邻的安装面11,第一图像采集部20和第二图像采集部30可以分别装设在这两个相邻的安装面11上,当然,在其他实施例中,云台相机100的机身10可以包括两个相对的安装面11,第一图像采集部20和第二图像采集部30可以分别装设在两个相对的安装面11上,在这种情形下,云台装置通过俯仰组件240驱动云台相机100转动,可实现第一图像采集部20和第二图像采集部30在无人飞行器航向上的位置切换。
[0065]
在上述实施例中,第一图像采集部20和第二图像采集部30可分别独立拆卸;在另一些实施例中,第一图像采集部20和第二图像采集部30也可以为一体结构,第一图像采集部20和第二图像采集部30作为一个整体可拆卸地设置于云台相机100的机身10的安装面11上。
[0066]
在本发明实施例中,云台相机100的机身10设置有第一图像采集部20和第二图像采集部30的安装面11上还设置有镜头固定件50,在一些实施例中,第一图像采集部20和第二图像采集部30分别对应独立的镜头固定件50,以满足第一图像采集部20和第二图像采集部30独立固定的需求;在另一些实施例中,镜头固定件50设置有两个镜头固定部(图未标识),该两个镜头固定部分别固定第一图像采集部20和第二图像采集部30。
[0067]
进一步地,镜头固定件50还包括固定位,通过该固定位使得镜头固定件50能够固定在云台相机100的机身10的安装面11上,具体的,该固定位可以是螺孔或者卡扣结构,使得镜头固定件50可通过螺丝固定的方式或者卡扣的方式固定在云台相机100的机身10的安装面11上,相应的,在云台相机100的机身10的安装面11上设置有与之配合的固定孔或者卡扣结构,如图2所示在云台相机100的机身10的安装面11上设置有安装镜头固定件50的第一固定孔111,第一固定孔111的数量可根据需要自由设定。
[0068]
在本发明实施例中,重新参阅图2,云台相机100的机身10的安装面11上还设置有存储卡安装槽112,该存储卡安装槽112可以和第一图像采集部20、第二图像采集部30设置在同一个安装面11上,也可以和第一图像采集部20、第二图像采集部30安装在不同的安装面11上,比如图1所示第一图像采集部20和第二图像采集部30所在的安装面11与图2所示存储卡安装槽112所在的安装面11相邻。
[0069]
在本发明实施例中,云台相机100的机身10的形状可以是方体或者柱体或者类球体。
[0070]
在本发明实施例中,云台200连接件40与云台相机100的机身10为一体结构。在本发明的一些实施例中,云台200连接件40可拆卸地固定在连接面12上,如图4所示,云台200连接件40包括马蹄形的连接架41,以及设置在连接架41上的固定部411以及限位部412,固定部411用于云台200连接件40在云台相机100的机身10的连接面12的安装固定,同样的,该固定部411可以是螺孔或者卡扣结构,使得云台200连接件40可通过螺丝固定的方式或者卡扣的方式固定在云台相机100的机身10的连接面12上,相应的,在云台相机100的机身10的连接面12上设置有与之配合的固定孔或者卡扣结构,如图2所示在云台相机100的机身10的
连接面12上设置有安装云台200连接件40的第二固定孔121,第二固定孔121的数量可根据需要自由设定;而限位部412用于云台200与云台200连接件40的连接限位,以保证云台200与云台相机100连接的稳定性,其中云台200的俯仰电机的旋转轴连接的连接部件嵌入连接架的中间区域,其上的限位部412件抵顶至限位部412内。
[0071]
可选的,云台相机100的机身10的连接面12包括相对的第一连接面和第二连接面,在第一连接面和第二连接面上均设置有云台200连接件40,云台200同时与第一连接面和第二连接面上的云台200连接件40连接,如此可以提高云台200与云台相机100连接的稳定性,可以理解,在第一连接面和第二连接面上可设置同样的云台200连接件40,也可以设置不同结构的云台200连接件40,比如在第一连接面设置图4所示的云台200连接件40,而在第二连接面上仅设置一轴孔,云台200的第二轴臂220的一端通过俯仰组件240连接至图4所示的云台200连接件40,而另一端通过端部设置的旋转轴直接插入该轴孔,完成连接,诸如此类,在此不再展开说明。
[0072]
在本发明实施例中,重新参阅图2,云台相机100的机身10的连接面12上还设置有数据接口122,云台相机100安装在云台200上时,数据接口122与云台200上对应的接口连接,以向与云台200连接的无人飞行器传输云台相机100采集的图像数据。
[0073]
在上述实施例中,第一图像采集部20和第二图像采集部30可以是红外热成像镜头和可见光镜头中的一种或者两种,即可以是第一图像采集部20为红外热成像镜头,第二图像采集部30为可见光镜头,或者第一图像采集部20和第二图像采集部30均为可见光镜头,或者第一图像采集部20和第二图像采集部30均为红外热成像镜头;其中,对于第一图像采集部20为红外热成像镜头,第二图像采集部30为可见光镜头的情形,采用该云台相机100的无人飞行器既可以在日间飞行进行航拍,也可以在夜间飞行进行航拍,满足多场景拍摄需求,同时还可以采集不同类型的图像,满足多样化图像的采集需求;对于第一图像采集部20和第二图像采集部30均为可见光镜头的情形,在光线良好的环境下,可以在不同方向上进行图像采集,也可以只启用其中一个而进行单方向的图像采集,这样可实现多场景拍摄和多样化图像采集的需求;对于第一图像采集部20和第二图像采集部30均为红外热成像镜头的情形,在光线较差的环境下,可以在不同方向上进行红外图像采集,也可以只启用其中一个而进行单方向的红外图像采集,同样实现了多场景拍摄和多样化图像采集的需求;在其他实施例中,还可将第一图像采集部20和第二图像采集部30采集的两路图像视频进行图像融合或者进行画中画显示,提供新型的图像显示内容。
[0074]
本实施例中所述的云台相机100的还可参阅前述实施例中所述的云台相机的相关技术内容。
[0075]
根据本发明实施例提供的云台装置,一方面,其采用的云台相机100设置有两个图像采集部,这两个图像采集部可以配置成独立工作也可以配置成分工合作,通过赋予这两个图像采集部不同的结构和功能,使得所述云台相机100可以在不同的场景下进行图像采集,大大提升了应用范围,同时采集的图像内容更加丰富和全面,能够更大程度上满足用户的需求,另一方面,其采用的云台200采用双轴臂与俯仰组件240、横滚组件230、偏航组件250交替连接形式形成二轴或者三轴的增稳云台200,可实现云台相机100的增稳功能,扩展拍摄空间范围,本发明提供的云台200结构简单,可实现多级运动控制,其稳定性更高。
[0076]
本发明实施例还提供一种无人飞行器,如图7所示,无人飞行器包括无人飞行器机
体1和云台装置2,其中云台装置2包括云台相机100和云台200,云台200包括第一轴臂210、第二轴臂220、俯仰组件240和横滚组件230,第一轴臂210的一端通过横滚组件230和第二轴臂220连接,第二轴臂220的一端通过俯仰组件240连接至云台相机100的云台连接件40,第一轴臂210的另一端固定在无人飞行器机体1上;俯仰组件240包括俯仰电机,用于驱动云台相机100转动;横滚组件230包括横滚电机,用于驱动第二轴臂220、俯仰组件240和云台相机100整体转动。
[0077]
进一步地,云台装置2还包括偏航组件250,第一轴臂210的另一端连接偏航组件250,偏航组件250固定在无人飞行器机体1上;偏航组件250包括偏航电机,用于驱动第一轴臂210、横滚组件230、第二轴臂220、俯仰组件240和云台相机100整体转动。在一些实施例中,偏航组件250与无人飞行器机体1的连接处采用快拆接口,可选的,在该快拆接口处还设置有密封件,提高云台装置2的防水性能,使得云台装置2在雨中或者潮湿环境中均能使用。
[0078]
在本实施例中,所述云台相机100和所述云台装置2的相关技术内容可参阅前述实施例提供的云台相机和云台装置,在此不再赘述。
[0079]
根据本发明实施例提供的无人飞行器,一方面,其采用的云台相机100设置有两个图像采集部,这两个图像采集部可以配置成独立工作也可以配置成分工合作,通过赋予这两个图像采集部不同的结构和功能,使得所述云台相机100可以在不同的场景下进行图像采集,大大提升了应用范围,同时采集的图像内容更加丰富和全面,能够更大程度上满足用户的需求,另一方面,其采用的云台200采用双轴臂与俯仰组件240、横滚组件230、偏航组件250交替连接形式形成二轴或者三轴的增稳云台200,可实现云台相机100的增稳功能,扩展拍摄空间范围,本发明提供的云台200结构简单,可实现多级运动控制,其稳定性更高。
[0080]
显然,以上所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,附图中给出了本发明的较佳实施例,但并不限制本发明的专利范围。本发明可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本发明说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本发明专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1