一种鲁棒稳定性的广义预控制方法
1.本发明涉及通信领域,具体涉及一种鲁棒稳定性的广义预控制方法。
背景技术:
2.现有的通信中,发射端在向接收端发射功率时不能有效控制发射功率,可能造成发射端过功率发射,造成信号污染或者是能源浪费。
3.故,本发明提出一种鲁棒稳定性的广义预控制方法能够有效解决该技术问题。并在对于发射端的功率确定上,使用了通信链路损耗模拟计算、预估计的方法,使得消除了一般方案中功率确定的滞后性和复杂性。
技术实现要素:
4.本发明所要解决的技术问题是现有技术中存在的能源浪费、信号干扰的技术问题。提供一种新的鲁棒稳定性的广义预控制方法,该鲁棒稳定性的广义预控制方法具有节约通信系统能源、减少信号干扰的特点。
5.为解决上述技术问题,采用的技术方案如下:
6.一种鲁棒稳定性的广义预控制方法,所述广义预控制方法用于通信系统,通信系统包括发射端和接收端,通信系统内置有三维地图,方法包括:
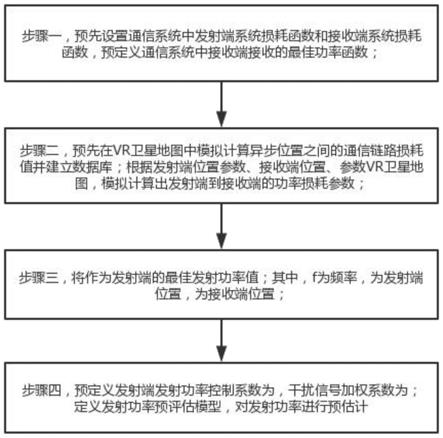
7.步骤一,预先设置通信系统中发射端系统损耗函数和接收端系统损耗函数,预定义通信系统中接收端接收的最佳功率函数p
g
(f);
8.步骤二,预先在三维地图中模拟计算异步位置之间的通信链路损耗值并建立数据库p(f,d1,d2);根据发射端位置参数、接收端位置,模拟计算出发射端到接收端的功率损耗参数p
s
(f);
9.步骤三,将c(f)=p
g
(f)+p
s
(f)作为发射端的最佳发射功率值;其中,f为频率,d1为发射端位置,d2为接收端位置;
10.步骤四,预定义发射端发射功率控制系数为λ2,干扰信号加权系数为λ1;定义发射功率预评估模型为:
[0011][0012][0013]
1=e
1,j
(q
‑1)(1+m1q
‑1)δ+q
‑
j
f
1,j
(q
‑1);
[0014]
1=e
2,j
(q
‑1)(1+m2q
‑1)δ+q
‑
j
f
2,p
(q
‑1);
[0015]
其中,y(k)为发射功率输出值,u(k)为发射功率控制信号输入值,z(k)为发射功率干扰值;m1(q
‑1)为预定义的q
‑1多项式,n1(q
‑1)为预定义的q
‑1多项式,m2(q
‑1)为预定义的q
‑1多项式,n2(q
‑1)为预定义的q
‑1多项式;c1=1,c2=1,k为时刻值,q
‑1为预定义的后移系数,δ=1
‑
q
‑1为差分系数,ε1(k)和ε2(k)为预定义的随机干扰项因子,j和p分别为发射功率模型
预估长度和干扰信号模型预估长度;
[0016]
步骤五,采集数据y(k),z(k),y(k
‑
1),z(k
‑
1),δu(k
‑
1)...δu(k
‑
20);δu(k
‑
1)...δu(k
‑
c2)为过去时刻控制输出差分量;
[0017]
步骤六,定义控制信号差分量
[0018][0019]
其中,b1为发射功率模型系数,b2干扰信号模型系数;干扰信号模型系数;和是根据下式计算:
[0020][0021][0022]
步骤七,计算出控制量:
[0023]
u(k)=u(k
‑
1)+δu(k);
[0024]
步骤八,定义k=k+1,返回步骤五。
[0025]
上述方案中,为优化,进一步的,步骤二还包括:
[0026]
步骤2.1,发射端将k
‑
1时刻包含发射功率参数p
k
‑1的数据帧发射给接收端;
[0027]
步骤2.2,接收端接收到测试帧检测出接收功率参数p’k
‑1,将接收功率参数p’k
‑1反馈给发射端;
[0028]
步骤2.3,发射端根据参数p
k
‑1、参数p’k
‑1计算实际的通信链路功率损耗为p
st
=p
k
‑1‑
p’k
‑1;
[0029]
步骤2.4,根据实际的通信链路功率损耗为p
st
=p
k
‑1‑
p’k
‑1和模拟功率损耗p
s
修正通信损耗值数据库。
[0030]
进一步的,步骤2.4中修正通信损耗值数据库采用的是机器学习方法。
[0031]
进一步的,发射端与接收端为移动设备,步骤2中发射端位置参数、接收端位置参数为位置函数,包含当前位置和未来时刻的计划移动轨迹。
[0032]
进一步的,发射功率的干扰信号z(k)更新为z(k)'=z(k)+p
st
‑
p
s
。
[0033]
本发明的有益效果:本发明通过对发射端发射功率的有效控制,减少通信系统的最大能源消耗,即发射信号时的过功率发送的能源消耗。同时,发射信号过大也会影响临近的其他通信信号。本发明通过采用vr卫星三维地图作为模拟空间,根据现有的计算空间损耗的方法,建立地图中两点之间的通信链路损耗。从而模拟出接收端所接收最佳功率值对应的发射端所应发射的功率值。在此基础上,采用一定时段内(即预估长度)的滚动预测评估,估计未来的为了实现最佳的发射功率值所应该输入的信号值。同时在滚动预评估中,也引入了干扰因素,减少了误差。作为优选,在发射端与接收端处于持续运动的情形下,可以
通过轨迹函数的预先导入或者预估,能够实现精度更高的发射功率控制。
附图说明
[0034]
下面结合附图和实施例对本发明进一步说明。
[0035]
图1,鲁棒稳定性的广义预控制方法示意图。
具体实施方式
[0036]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0037]
实施例1
[0038]
本实施例提供一种鲁棒稳定性的广义预控制方法,如图1,所述广义预控制方法用于通信系统,通信系统包括发射端和接收端,通信系统内置有三维地图,方法包括:
[0039]
步骤一,预先设置通信系统中发射端系统损耗函数和接收端系统损耗函数,预定义通信系统中接收端接收的最佳功率函数p
g
(f);
[0040]
步骤二,预先在三维地图中模拟计算异步位置之间的通信链路损耗值并建立数据库p(f,d1,d2);根据发射端位置参数、接收端位置,模拟计算出发射端到接收端的功率损耗参数p
s
(f);
[0041]
步骤三,将c(f)=p
g
(f)+p
s
(f)作为发射端的最佳发射功率值;其中,f为频率,d1为发射端位置,d2为接收端位置;
[0042]
步骤四,预定义发射端发射功率控制系数为λ2,干扰信号加权系数为λ1;定义发射功率预评估模型为:
[0043][0044][0045]
1=e
1,j
(q
‑1)(1+m1q
‑1)δ+q
‑
j
f
1,j
(q
‑1);
[0046]
1=e
2,j
(q
‑1)(1+m2q
‑1)δ+q
‑
j
f
2,p
(q
‑1);
[0047]
其中,y(k)为发射功率输出值,u(k)为发射功率控制信号输入值,z(k)为发射功率干扰值;m1(q
‑1)为预定义的q
‑1多项式,n1(q
‑1)为预定义的q
‑1多项式,m2(q
‑1)为预定义的q
‑1多项式,n2(q
‑1)为预定义的q
‑1多项式;c1=1,c2=1,k为时刻值,q
‑1为预定义的后移系数,δ=1
‑
q
‑1为差分系数,ε1(k)和ε2(k)为预定义的随机干扰项因子,j和p分别为发射功率模型预估长度和干扰信号模型预估长度;
[0048]
步骤五,采集数据y(k),z(k),y(k
‑
1),z(k
‑
1),δu(k
‑
1)...δu(k
‑
20);δu(k
‑
1)...δu(k
‑
c2)为过去时刻控制输出差分量;
[0049]
步骤六,定义控制信号差分量
[0050][0051]
其中,b1为发射功率模型系数,b2干扰信号模型系数;干扰信号模型系数;和是根据下式计算:
[0052][0053][0054]
步骤七,计算出控制量:
[0055]
u(k)=u(k
‑
1)+δu(k);
[0056]
步骤八,定义k=k+1,返回步骤五。
[0057]
具体地,步骤二还包括:
[0058]
步骤2.1,发射端将k
‑
1时刻包含发射功率参数p
k
‑1的数据帧发射给接收端;
[0059]
步骤2.2,接收端接收到测试帧检测出接收功率参数p’k
‑1,将接收功率参数p’k
‑1反馈给发射端;
[0060]
步骤2.3,发射端根据参数p
k
‑1、参数p’k
‑1计算实际的通信链路功率损耗为p
st
=p
k
‑1‑
p’k
‑1;
[0061]
步骤2.4,根据实际的通信链路功率损耗为p
st
=p
k
‑1‑
p’k
‑1和模拟功率损耗p
s
修正通信损耗值数据库。
[0062]
具体地,步骤2.4中修正通信损耗值数据库采用的是机器学习方法。本实施例中的机器学习方法可采用现有的技术,本实施例不再赘述。
[0063]
具体地,发射端与接收端为移动设备,步骤2中发射端位置参数、接收端位置参数为位置函数,包含当前位置和未来时刻的计划移动轨迹。此时,可以输入规划好的轨迹路线,进行对比计算实时位置,调用数据库中的模拟损耗值。
[0064]
具体地,发射功率的干扰信号z(k)更新为z(k)'=z(k)+p
st
‑
p
s
。通信链路的模拟损耗值误差也记为一种干扰因素,将发射功率预估计时的干扰因素更新,能够进一步提交精度。
[0065]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员能够理解本发明,但是本发明不仅限于具体实施方式的范围,对本技术领域的普通技术人员而言,只要各种变化只要在所附的权利要求限定和确定的本发明精神和范围内,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1