一种城市车联网中基于蚁群优化的自修复路由策略
1.本发明属于城市车联网路由策略领域,能够构建适应城市车联网中拓扑变化频繁的场景,延长路由链路的持续时间,降低传输时延,提高吞吐量。具体是一种城市车联网中基于蚁群优化的自修复路由策略。
背景技术:
2.根据the international organization of motor vehicle manufacturers(oica)的调查,截至2021年,全球汽车保有量达8.21亿辆,并且增长率为6.4%。车辆联网通信可以有效的提高道路交通安全指数,降低事故发生率,因此随着网络化和智能化的普及,车载自组网(vanets)受到学术界和工业界的广泛关注。vanets在控制道路拥堵,车辆安全驾驶,车载娱乐应用等方面都有广泛的应用前景。然而,由于车辆移动速度快,通信信道质量差,尤其在城市车联网环境中,车辆运动的不确定性导致路由拓扑不稳定,车辆通信过程中链路断开概率高达80%。
3.蚁群算法是一种用来寻找优化路径的概率型算法。它由marco dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。li,sun等人提出把蚁aco应用到vanets中,在拓扑变化频繁的城市车联网环境中构建从源节点到目的节点的具有最优连通性的路由路径。然而,使用aco建立的路由链路受信息素的影响,持续时间较短,丢包率高。频繁的探路过程一方面提高了通信开销,另一方面增加了通信时延。因此基于aco的路由策略普遍存在通信开销大,时延高,吞吐量低等问题。
4.本专利提出了一种高效的基于aco的自修复路由策略(sr),以提高路由协议在城市环境下的性能和对动态网络拓扑的适应性。sr基于蚁群优化算法进行最优路径规划,提出使用信息素参与度量化全局和局部信息素;采用分治的思想,十字路口节点和车辆节点在信息素到达蒸发阈值前分别采用全局自修复和路间自修复的方式保持链路新鲜度,延长链路存在时间。通过本路由策略可以减少重建次数,降低传输延时,减少通信开销;维护拓扑稳定性,提升吞吐量。
技术实现要素:
5.一种城市车联网中基于蚁群优化的自修复路由策略包括以下几个步骤:
6.a.路由准备:数据包发送车辆v
s
首先与最近十字路口i
s
的簇头节点v
vs
通过移动预测法确定目的节点v
d
即将到达的十字路口簇i
d
的簇头节点v
vd
位置loc,若v
vs
的路由表中存在到达i
d
的路由链路则直接发送;否则执行b步骤发送前向探路蚂蚁包进行最优路由链路建立。按三角隶属度函数将所有车辆路由通信能力量化为0到1的参数ph称为信息素参与度;根据车辆连通性计算链接持续时间lt。
7.b.基于信息素参与度的最优路由路径建立:由ph和lt计算局部信息素l和全局信息素g,根据蚁群优化算法计算公式p
i,j
,分别取α=1,β=1;当数据包到达每个中间十字路口通过p
i,j
进行选择下一十字路口;当目的十字路口收到前向探路蚂蚁包后将最先收到的
前向蚂蚁包变为后向蚂蚁包,按照包中已存储的路由路径发回源十字路口,并按照公式g
ij
←
(1
‑
δ)
·
g
ij
+δ
·
lg
ij
进行全局信息素消散;另,当目的十字路口收到后向蚂蚁包后确认路由路径已经建立完成,记录入路由表并进行信息素消散算法,消散参数ρ=0.8。
8.c.基于分治的自修复方案:对路由路径使用分治的策略,即将每对十字路口间的路由链路看作独立的路由路径,并由前十字路口维护到达后十字路口的路由链路信息素,当信息素到达阈值后执行自修复策略。其中自修复分为路间修复和路口间全局修复。当路由链路信息素低至路口间修复阈值δp
i
,以当前十字路口为原十字路口,向目的十字路口执行b步骤进行最优路径建立;当某一路由链路信息素到达路间修复阈值δp
r
,进行基于运动趋势的路间自修复,根据方向性公式tov
s,i
计算score
i
得分,以此选择具有相同或相近运动趋势的车辆作为继任者参与路由构建。若两种修复都完成,优先选择路间自修复的结果。
9.本发明对比已有技术具有以下显著优点:
10.1.该方法提出基于信息素参与度的最优路径建立,降低计算复杂度。
11.2.该发明可以提高链路存在时间,减少重建次数,降低传输延时,减少通信开销;维护拓扑稳定性,显著提升吞吐量。
附图说明
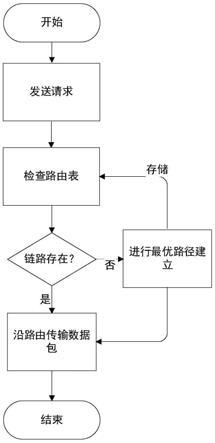
12.图1是本发明的路由开始流程图。
13.图2是本发明的最优路径建立具体实施流程图。
14.图3是本发明的自修复方案具体实施流程图。
15.图4、图5和图6是本发明中的三角隶属度函数图像。
16.图7是本发明和现有策略的性能对比表格。
17.图8是本发明和其他现有策略在不同通信距离下平均端到端时延对比图。
18.图9是本发明和其他现有策略在不同车辆密度下平均端到端时延对比图。
19.图10是本发明和其他现有策略在不同车辆通信半径下平均端到端时延对比图。
20.图11是本发明和其他现有策略在不同加速度方差下平均端到端时延对比图。
21.图12是本发明和其他现有策略在不同通信距离下吞吐量对比图。
22.图13是本发明和其他现有策略在不同车辆通信半径下吞吐量对比图。
23.图14是本发明和其他现有策略在不同车辆密度下平均控制开销对比图。
24.图15是本发明和其他现有策略在不同传输距离下平均路由开销对比图。
具体实施方式
25.下面结合附图,说明本发明的实施方式。
26.图1、2和3是一种城市车联网中基于蚁群优化的自修复路由策略的流程图,具体实现为:
27.a.路由准备:数据包发送车辆v
s
首先与最近十字路口i
s
的簇头节点v
vs
通过移动预测法确定目的节点v
d
即将到达的十字路口簇i
d
的簇头节点v
vd
位置loc,若v
vs
的路由表中存在到达i
d
的路由链路则直接发送;否则执行b步骤发送前向探路蚂蚁包进行最优路由链路建立。按三角隶属度函数将所有车辆路由通信能力量化为0到1的参数ph称为信息素参与度;根据车辆连通性计算链接持续时间lt。
28.b.基于信息素参与度的最优路由路径建立:由ph和lt计算局部信息素l和全局信息素g,根据蚁群优化算法计算公式p
i,j
,分别取α=1,β=1;当数据包到达每个中间十字路口通过p
i,j
进行选择下一十字路口;当目的十字路口收到前向探路蚂蚁包后将最先收到的前向蚂蚁包变为后向蚂蚁包,按照包中已存储的路由路径发回源十字路口,并按照公式g
ij
←
(1
‑
δ)
·
g
ij
+δ
·
lg
ij
进行全局信息素消散;另,当目的十字路口收到后向蚂蚁包后确认路由路径已经建立完成,记录入路由表并进行信息素消散算法,消散参数ρ=0.8。
29.c.基于分治的自修复方案:对路由路径使用分治的策略,即将每对十字路口间的路由链路看作独立的路由路径,并由前十字路口维护到达后十字路口的路由链路信息素,当信息素到达阈值后执行自修复策略。其中自修复分为路间修复和路口间全局修复。当路由链路信息素低至路口间修复阈值δp
i
,以当前十字路口为原十字路口,向目的十字路口执行b步骤进行最优路径建立;当某一路由链路信息素到达路间修复阈值δp
r
,进行基于运动趋势的路间自修复,根据方向性公式tov
s,i
计算score
i
得分,以此选择具有相同或相近运动趋势的车辆作为继任者参与路由构建。若两种修复都完成,优先选择路间自修复的结果。
30.图4、5和6是本发明中采用模糊逻辑量化信息素参与度的三角隶属度函数图像。其中包传输比pdr和时延delay作为两个输入,信息素参与度ph作为输出。整个系统规则共12条,采用重心法去模糊化。
31.图7是本发明与aqrv和idr两种现有策略的对比,其中迭代次数,迭代时间开销均降低一倍,链路存在时间可以提升至4倍左右。
32.图8、9、10、11、12、13、14和15是本发明提出的方法与aqrv和idr两种现有策略的在平均端到端时延、吞吐量、平均控制开销以及平均路由开销的对比。由此对比图可以看出本发明提出的方法能够在强不规则的城市车联网场景下牺牲了较少的控制开销,极大地提升路由链路的持续时间,降低端到端传输时延,较大程度地提升吞吐量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1