一种操作方法和执行设备与流程
1.本发明涉及设备操作领域,尤其涉及一种操作方法和执行设备。
背景技术:
2.为了让设备有更多的灵活性,往往需要对设备进行操作,以让设备执行一些功能。
3.现有的设备中,缺乏对环境信息的采集,导致在操作设备时,不能基于环境信息控制该设备,从而不方便对设备的操作。
技术实现要素:
4.本发明实施例提供了一种操作方法和执行设备,用于方便对设备的操作。
5.为达此目的,本发明实施例采用以下技术方案:
6.一种操作方法,所述操作方法应用于执行设备,所述执行设备包括全景摄像组件和执行组件;
7.所述操作方法包括:
8.通过所述全景摄像组件采集全景图像;
9.根据所述全景图像,获取控制指令;
10.根据所述控制指令,控制所述执行组件向目标方向执行目标操作。
11.可选地,所述根据所述全景图像,获取控制指令,包括:
12.向控制设备发送所述全景图像,以使所述控制设备展示所述全景图像;
13.获取所述控制设备发送的控制指令。
14.可选地,所述根据所述控制指令,控制所述执行组件向目标方向执行目标操作,包括:
15.根据所述控制指令,控制所述执行组件转动到指向目标方向的位置,以使所述执行组件向所述目标方向执行目标操作。
16.可选地,所述执行设备包括多个指向不同方向的执行组件;
17.所述根据所述控制指令,控制所述执行组件向目标方向执行目标操作,包括:
18.根据所述控制指令,从多个指向不同方向的所述执行组件中确定目标执行组件,所述目标执行组件指向目标方向;
19.控制所述目标执行组件向所述目标方向执行目标操作。
20.可选地,所述执行组件为投射器;
21.所述根据所述控制指令,控制所述执行组件向目标方向执行目标操作,包括:
22.根据所述控制指令,控制所述投射器向目标方向投射目标物体。
23.可选地,所述执行设备还包括移动组件和喇叭组件;
24.所述投射器为投食器,所述目标物体为食物;
25.所述操作方法还包括:
26.获取所述控制设备发送的移动指令;
27.根据所述移动指令的指示,通过所述移动组件调整所述执行设备的位置;
28.获取所述控制设备发送的音频信息;
29.通过所述喇叭组件,播放所述音频信息。
30.可选地,所述根据所述全景图像,获取控制指令,包括:
31.在所述全景图像中识别目标对象;
32.确定所述目标对象所处的目标空间位置;
33.确定目标方向,所述目标方向指向所述目标空间位置;
34.触发预设的控制指令。
35.可选地,所述执行组件为扬声器;
36.所述执行设备还包括主体设备,所述全景摄像组件和所述扬声器设置在所述主体设备上;
37.所述主体设备为路灯或无人机;
38.所述根据所述控制指令,控制所述执行组件向目标方向执行目标操作,包括:
39.根据所述控制指令,控制所述扬声器向目标方向播放声音信息。
40.为达此目的,本发明实施例还采用以下技术方案:
41.一种执行设备,所述执行设备包括全景摄像组件和执行组件;
42.所述执行设备包括:
43.采集单元,用于通过所述全景摄像组件采集全景图像;
44.获取单元,用于根据所述全景图像,获取控制指令;
45.控制单元,用于根据所述控制指令,控制所述执行组件向目标方向执行目标操作。
46.可选地,所述获取单元包括发送模块和获取模块;
47.所述发送模块,用于向控制设备发送所述全景图像,以使所述控制设备展示所述全景图像;
48.所述获取模块,用于获取所述控制设备发送的控制指令。
49.可选地,所述控制单元,还用于根据所述控制指令,控制所述执行组件转动到指向目标方向的位置,以使所述执行组件向所述目标方向执行目标操作。
50.可选地,所述执行设备包括多个指向不同方向的执行组件;
51.所述控制单元包括确定模块和控制模块;
52.所述确定模块,用于根据所述控制指令,从多个指向不同方向的所述执行组件中确定目标执行组件,所述目标执行组件指向目标方向;
53.所述控制模块,用于控制所述目标执行组件向所述目标方向执行目标操作。
54.可选地,所述执行组件为投射器;
55.所述控制单元,还用于根据所述控制指令,控制所述投射器向目标方向投射目标物体。
56.可选地,所述执行设备还包括移动组件和喇叭组件;
57.所述投射器为投食器,所述目标物体为食物;
58.所述执行设备还包括:
59.指令获取单元,用于获取所述控制设备发送的移动指令;
60.位置调整单元,用于根据所述移动指令的指示,通过所述移动组件调整所述执行
设备的位置;
61.信息获取单元,用于获取所述控制设备发送的音频信息;
62.播放单元,用于通过所述喇叭组件,播放所述音频信息。
63.可选地,所述获取单元包括识别模块、位置确定模块、方向确定模块和触发模块;
64.所述识别模块,用于在所述全景图像中识别目标对象;
65.所述位置确定模块,用于确定所述目标对象所处的目标空间位置;
66.所述方向确定模块,用于确定目标方向,所述目标方向指向所述目标空间位置;
67.所述触发模块,用于触发预设的控制指令。
68.可选地,所述执行组件为扬声器;
69.所述执行设备还包括主体设备,所述全景摄像组件和所述扬声器设置在所述主体设备上;
70.所述主体设备为路灯或无人机;
71.所述控制单元,还用于根据所述控制指令,控制所述扬声器向目标方向播放声音信息。
72.从以上技术方案可以看出,本发明实施例具有以下优点:
73.本发明实施例的操作方法应用于执行设备,该执行设备包括全景摄像组件和执行组件。其中,该操作方法包括:通过全景摄像组件采集全景图像。根据全景图像,获取控制指令。从而,根据控制指令,控制执行组件向目标方向执行目标操作。因通过采集全景图像可以得到空间中范围较广的信息,从而可以根据空间中范围较广的信息确定操作方式,以控制执行组件向目标方向执行目标操作,这样,利于对执行组件的控制,方便了对设备的操作。
附图说明
74.图1为本发明一实施例提供的一种操作方法的流程图;
75.图2为本发明另一实施例提供的一种操作方法的流程图;
76.图3为本发明另一实施例提供的一种投射设备的结构示意图;
77.图4为本发明另一实施例提供的一种操作方法的流程图;
78.图5为本发明另一实施例提供的一种操作方法的流程图;
79.图6为本发明另一实施例提供的一种执行设备的结构示意图;
80.图7为本发明另一实施例提供的一种执行设备的结构示意图。
具体实施方式
81.本发明实施例提供了一种操作方法和执行设备,用于方便对设备的操作。
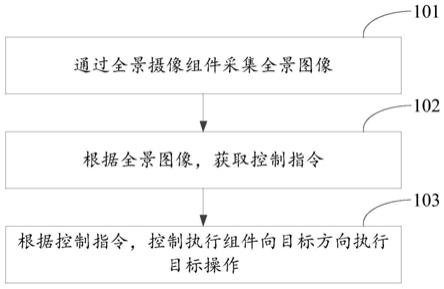
82.图1为本发明实施例提供的一种操作方法的流程图。本发明实施例的操作方法应用于执行设备,执行设备包括全景摄像组件和执行组件。
83.参阅图1,本发明实施例的操作方法包括:
84.步骤101:通过全景摄像组件采集全景图像。
85.执行设备包括全景摄像组件,全景摄像组件用于采集全景图像。通过全景摄像组件可以采集得到全景图像,从而可通过全景图像分析出执行设备所处的环境的信息。
86.本发明实施例的全景摄像组件有多种实现方式,例如为包括多个摄像头的全景相机,或者多个布置在不同位置的摄像头等。将不同摄像头采集的图像拼接起来,即可得到全景图像。
87.步骤102:根据全景图像,获取控制指令。
88.全景图像记录了执行设备所处的环境的信息,且这些信息涉及的空间范围较广。通过对全景图像分析,可确定出对执行设备的操作方式,对执行设备的控制,可通过控制指令实现。
89.步骤102的具体实现方式有多种,本发明实施例对此不作具体限定。下面以两个示例进行具体的说明。
90.示例一:
91.步骤102具体包括:向控制设备发送全景图像,以使控制设备展示全景图像。以及,获取控制设备发送的控制指令。
92.具体来说,执行设备和控制设备通讯连接,例如无线连接。执行设备通过全景摄像组件采集得到全景图像后,将全景图像发送给控制设备,从而控制设备可以展示全景图像,以供用户查看。其中,控制设备具体可以为计算机、vr眼镜等,本发明实施例对此不作具体限定。控制设备展示全景图像的方式有多种,例如在显示屏上显示,或者向幕布投影等,本发明实施例对此不作具体限定。
93.用户通过控制设备查看了展示的全景图像后,可获取到执行设备所处的环境的信息,从而可根据执行设备所处的环境的信息进行判断,以控制执行设备。因全景图像记录了空间上下360度以及左右360度范围的信息,从而用户通过全景图像可获取到较广的空间范围的信息。用户为了控制执行设备,可触发控制设备产生控制指令,控制设备向执行设备发送控制指令,以实现对执行设备的控制。
94.应该理解,在本发明的实施例中,和执行设备通讯连接的控制设备可以为一个或多个,本发明实施例对此不作具体限定。
95.示例二:
96.步骤102具体包括:在全景图像中识别目标对象;确定目标对象所处的目标空间位置。以及,确定目标方向,其中,目标方向指向目标空间位置。并且,触发预设的控制指令。
97.全景图像记录了执行设备所处的环境的信息,在执行设备所处的环境中,可能存在目标对象,为此可对全景图像进行分析,以在全景图像中识别出目标对象。若识别出目标对象,可通过分析全景图像,确定目标对象所处的目标空间位置,从而可确定出指向目标空间位置的目标方向,为控制执行组件做准备。为了控制执行组件,还需触发预设的控制指令。其中,这些步骤可在执行设备上执行,也可以在其它和执行设备通讯的设备上执行。
98.步骤103:根据控制指令,控制执行组件向目标方向执行目标操作。
99.执行设备获取了控制指令后,可根据控制指令,控制执行组件向目标方向执行目标操作。
100.目标操作为执行组件执行的操作,有多种实现方式,本发明实施例对此不作具体限定。
101.步骤103的具体实现方式有多种,下面举两个示例进行详细的说明。
102.示例一:
103.在本示例中,步骤103具体包括:根据控制指令,控制执行组件转动到指向目标方向的位置,以使执行组件向目标方向执行目标操作。
104.执行组件为可转动的组件,可指向空间中多个方向,在控制指令的指示下,执行组件进行转动,转动到具体的位置停下,此时,执行组件指向目标方向,从而执行组件可向目标方向执行目标操作。
105.示例二:
106.在本示例中,执行设备包括多个指向不同方向的执行组件。
107.步骤103具体包括:根据控制指令,从多个指向不同方向的执行组件中确定目标执行组件,其中,目标执行组件指向目标方向。然后,控制目标执行组件向目标方向执行目标操作。
108.在本示例中,执行设备上的执行组件数量有多个,分别指向不同的方向。根据控制指令的指示,可确定出指向目标方向的目标执行组件,从而可以通过目标执行组件向目标方向执行目标操作。
109.全景图像记录了空间中范围较广的信息,通过对全景图像的分析,可确定出执行设备所处的环境的信息,在上述示例中,执行组件可转动或者指向不同方向,这样可充分利用全景图像记录的信息,来控制执行组件的指向,使得执行组件灵活地向目标方向执行目标操作。
110.应该理解,在本发明实施例中,可选地,执行设备还可以包括设备主体,其中,全景摄像组件和执行组件设置在设备主体上。
111.综上所述,本发明实施例的操作方法应用于执行设备,该执行设备包括全景摄像组件和执行组件。其中,该操作方法包括:通过全景摄像组件采集全景图像。根据全景图像,获取控制指令。从而,根据控制指令,控制执行组件向目标方向执行目标操作。因通过采集全景图像可以得到空间中范围较广的信息,从而可以根据空间中范围较广的信息确定操作方式,以控制执行组件向目标方向执行目标操作,这样,利于对执行组件的控制,方便了对设备的操作。
112.图2为本发明实施例提供的一种操作方法的流程图。图2所示实施例的操作方法可基于图1所示实施例的操作方法实现。其中,图2所示实施例的操作方法应用于执行设备,执行设备包括全景摄像组件和执行组件。
113.参阅图2,本发明实施例的操作方法包括:
114.步骤201:通过全景摄像组件采集全景图像。
115.执行设备包括全景摄像组件,通过全景摄像组件可采集得到全景图像。全景图像记录了空间中范围较广的信息,从而可通过全景图像分析出执行设备所处的环境较多的信息。
116.步骤202:向控制设备发送全景图像。
117.执行设备向控制设备发送全景图像,以使控制设备展示全景图像。
118.执行设备和控制设备通讯连接,从而执行设备和控制设备可以相互通信。控制设备获取到执行设备发送的全景图像后,可展示全景图像,例如,控制设备为vr眼镜,vr眼镜上可展示出全景图像。这样,用户通过控制设备可查看全景图像,从而可以远程观看执行设备所处的环境的情况。
119.步骤203:获取控制设备发送的控制指令。
120.执行设备获取控制设备发送的控制指令。
121.控制设备可产生控制指令,例如用户通过控制设备查看了全景图像后,可操纵控制设备,以使控制设备产生控制指令,并且控制设备向执行设备发送控制指令,以控制执行设备。从而,用户可以远程控制执行设备。
122.应该理解,步骤202和步骤203为根据全景图像获取控制指令的步骤的具体实现方式之一,根据全景图像获取控制指令的步骤还有多种实现方式,具体可参阅图1所示实施例的步骤102的示例一和示例二。
123.步骤204:根据控制指令,控制投射器向目标方向投射目标物体。
124.在本发明实施例中,执行组件为投射器。
125.执行设备获取了控制指令后,可根据控制指令,控制投射器向目标方向投射目标物体。因用户通过控制设备查看全景图像,可了解执行设备所处的环境的情况,从而方便用户准确控制投射器向目标方向投射目标物体。
126.应该理解,目标方向确定的方式有多种,除了通过控制设备发送控制指令的方式外,还可如上述步骤102的示例二所示,在该示例中,执行设备在全景图像中识别目标对象;确定目标对象所处的目标空间位置。以及,确定目标方向,其中,目标方向指向目标空间位置。然后,触发预设的控制指令。这样,即可确定出目标方向,从而,执行设备可以根据控制指令,控制投射器向目标方向投射目标物体。
127.应该理解,步骤204为根据控制指令,控制执行组件向目标方向执行目标操作的具体实现方式之一。
128.在本实现方式中,执行组件为投射器,目标操作为投射目标物体。在一个具体示例中,投射器为投食器,目标物体为食物。这样,用户通过本发明实施例的操作方法可进行远程投递食物。
129.例如,执行设备为投射设备,图3为本发明实施例提供的一种投射设备的结构示意图。该投射设备包括设备主体301,设备主体301上设有全景摄像组件302和投射器303,投射器303可转动,以指向空间的多个不同的方向。投射器303可投射目标物体。
130.应该理解,如上述图1所示的实施例的描述,执行组件可转动或者指向不同方向,图2所示的实施例可基于图1所示的实施例实现,从而,在本实施例中,投射器可转动,或者投射器为多个且指向不同方向。
131.例如,步骤204具体可以为:根据控制指令,控制投射器转动到指向目标方向的位置,以使投射器向目标方向投射目标物体。这样,用户通过本发明实施例的操作方法可控制投射器向多个方向投射目标物体,使得用户有更多的操作灵活性。
132.可选地,执行设备还包括移动组件和喇叭组件。此时,如图4所示,本发明实施例的操作方法还包括步骤a1至步骤a4。
133.如下所示:
134.步骤a1:获取控制设备发送的移动指令。
135.步骤a2:根据移动指令的指示,通过移动组件调整执行设备的位置。
136.步骤a3:获取控制设备发送的音频信息。
137.步骤a4:通过喇叭组件,播放音频信息。
138.因执行设备和控制设备通讯连接,从而执行设备可从控制设备处获取多种信息,具体可以为获取移动指令和音频信息。例如,用户通过控制设备查看全景图像后,可获悉执行设备所处的环境的情况,从而可根据用户的需求控制执行设备移动,具体的实现方式为,控制设备向执行设备发送移动指令,执行设备根据移动指令的指示,通过移动组件调整执行设备的位置,从而控制了执行设备的移动。用户还可以通过控制设备向执行设备发送音频信息,音频信息可以为控制设备获取的用户的语音,或者控制设备本地存储的语音,或者从其它设备获取的语音。执行设备获取了音频信息后,执行设备可通过喇叭组件,播放音频信息。
139.应该理解,步骤a1和a2为一组步骤,步骤a3和a4为另一组步骤,本发明实施例不对这两组步骤的执行先后顺序作限定。在一些实施例中,可以只执行步骤a1和a2;在另一些实施例中,也可以只执行步骤a3和a4。
140.本发明实施例的操作方法有多种应用场景,例如应用于畜牧业。
141.比如,本发明实施例的操作方法可应用于养猪场,执行设备通过全景摄像组件采集全景图像,从而采集到养猪场的信息。执行设备向控制设备发送全景图像,控制设备展示全景图像,用户通过查看全景图像,可获悉养猪场的信息,并找到猪的位置。然后,用户操作控制设备,使得控制设备产生控制指令。执行设备获取控制设备发送的控制指令后,在控制指令的指示下,执行设备控制投食器转动,使得投食器转动到指向目标方向的位置,投食器指向目标方向即指向猪的方向,然后,控制投食器向目标方向投射食物,使得食物落到猪的位置处,从而实现了远程饲养猪。用户还可以通过操作控制设备,使得控制设备向执行设备发送移动指令,以使得执行设备根据移动指令的指示,通过移动组件调整执行设备的位置。或者,用户操作控制设备,使得控制设备向执行设备发送音频信息。执行设备通过喇叭组件,播放音频信息。例如播放用户的喊话。
142.综上所述,本发明实施例的操作方法应用于执行设备,该执行设备包括全景摄像组件和执行组件。其中,该操作方法包括:通过全景摄像组件采集全景图像。根据全景图像,获取控制指令。从而,根据控制指令,控制执行组件向目标方向执行目标操作。因通过采集全景图像可以得到空间中范围较广的信息,从而可以根据空间中范围较广的信息确定操作方式,以控制执行组件向目标方向执行目标操作,这样,利于对执行组件的控制,方便了对设备的操作。
143.图5为本发明实施例提供的一种操作方法的流程图。其中,图5所示实施例的操作方法可基于图1所示实施例的操作方法实现。图5所示实施例的操作方法应用于执行设备,执行设备包括全景摄像组件和执行组件。
144.参阅图5,本发明实施例的操作方法包括:
145.步骤501:通过全景摄像组件采集全景图像。
146.执行设备包括全景摄像组件,通过全景摄像组件可采集到全景图像。全景图像记录了空间中范围较广的信息,从而可通过全景图像分析出执行设备所处的环境较多的信息。
147.步骤502:向控制设备发送全景图像。
148.执行设备和控制设备通讯连接,执行设备获取了全景图像后,执行设备向控制设备发送全景图像,以使控制设备展示全景图像。这样用户通过控制设备可查看全景图像,从
而获悉执行设备所处的环境的信息。
149.例如,控制设备为vr眼镜,vr眼镜可展示全景图像。执行设备向vr眼镜发送全景图像,用户佩戴该vr眼镜即可查看到全景图像。
150.步骤503:获取控制设备发送的控制指令。
151.执行设备获取控制设备发送的控制指令。
152.控制设备可产生控制指令,例如用户通过控制设备查看了全景图像后,可操纵控制设备,以使控制设备产生控制指令,并且控制设备向执行设备发送控制指令,以控制执行设备。从而,用户可以远程控制执行设备。
153.应该理解,步骤502和步骤503为根据全景图像获取控制指令的步骤的具体实现方式之一。根据全景图像获取控制指令的步骤还有多种实现方式,具体可参阅图1所示实施例的步骤102的示例一和示例二。
154.步骤504:根据控制指令,控制扬声器向目标方向播放声音信息。
155.在本发明实施例中,执行组件为扬声器,目标操作为播放声音信息。
156.执行设备还包括主体设备,全景摄像组件和扬声器设置在主体设备上。主体设备为路灯或无人机。
157.具体来说,如图6所示,可以将全景摄像组件601和扬声器602设置在路灯603上,或者,将全景摄像组件和扬声器设置在无人机上。
158.在本发明实施例中,执行设备获取控制设备发送的控制指令后,执行设备可根据控制指令,控制扬声器向目标方向播放声音信息。
159.该声音信息可以预存在执行设备本地,由控制指令触发播放。或者,该声音信息可从控制设备处获取,例如用户说话,并通过控制设备向执行设备传送声音信息,控制指令中可包括声音信息,执行设备获取到声音信息后,控制扬声器向目标方向播放声音信息。
160.应该理解,步骤504为根据控制指令控制执行组件向目标方向执行目标操作的具体实现方式之一。
161.如步骤103的示例一和示例二所示,步骤504有多种实现方式。
162.在一个具体的实现方式中,步骤504包括:根据控制指令,控制扬声器转动到指向目标方向的位置,以使扬声器向目标方向播放声音信息。
163.具体来说,扬声器在主体设备上可以转动,控制指令记录了转动的角度,在控制指令的指示下,执行设备控制扬声器转动到指向目标方向的位置,然后,执行设备触发扬声器播放声音信息,使得扬声器向目标方向播放声音信息。
164.在另一个具体的实现方式中,执行设备包括多个指向不同方向的扬声器,此时,步骤504包括:根据控制指令,从多个指向不同方向的扬声器中确定目标扬声器,其中,目标扬声器指向目标方向。然后,控制目标扬声器向目标方向播放声音信息。这样,控制设备可选择指向目标方向的扬声器播放声音信息。
165.因声音会沿一定的方向传播,本发明实施例的方法可通过控制扬声器转动,或者选择指向目标方向的目标扬声器,可使得扬声器向目标方向播放声音信息。通过目标方向的选择,用户可以灵活控制声音信息的传播方向。
166.应该理解,除了上述的根据控制指令确定目标方向的方式外,本发明实施例的方法还有多种方式确定目标方向,例如,执行设备在全景图像中识别目标对象;确定目标对象
所处的目标空间位置。以及,确定目标方向,其中,目标方向指向目标空间位置。然后,触发预设的控制指令。这样,即可确定出目标方向。以根据控制指令,控制扬声器向目标方向播放声音信息。
167.本发明实施例的方法可应用于多种场景中,例如,在路灯或无人机上设置全景摄像组件和扬声器以形成执行设备,全景摄像组件采集全景图像后,通过传输组件等器件向控制设备发送全景图像。用户查看控制设备展示的全景图像,可获悉路灯或无人机所处的环境的情况,并根据需要通过控制设备向执行设备发送控制指令,以控制扬声器向目标方向播放声音信息。此时,沿目标方向有需要接收该声音信息的对象,例如一些特定人群。
168.综上所述,本发明实施例的操作方法应用于执行设备,该执行设备包括全景摄像组件和执行组件。其中,该操作方法包括:通过全景摄像组件采集全景图像。根据全景图像,获取控制指令。从而,根据控制指令,控制执行组件向目标方向执行目标操作。因通过采集全景图像可以得到空间中范围较广的信息,从而可以根据空间中范围较广的信息确定操作方式,以控制执行组件向目标方向执行目标操作,这样,利于对执行组件的控制,方便了对设备的操作。
169.图7为本发明实施例提供的一种执行设备的结构示意图。图7所示实施例的执行设备可用于执行图1、图2和图5所示实施例的操作方法。
170.参阅图7,本发明实施例的执行设备包括全景摄像组件和执行组件。该执行设备包括:
171.采集单元701,用于通过全景摄像组件采集全景图像;
172.获取单元702,用于根据全景图像,获取控制指令;
173.控制单元703,用于根据控制指令,控制执行组件向目标方向执行目标操作。
174.可选地,获取单元702包括发送模块704和获取模块705;
175.发送模块704,用于向控制设备发送全景图像,以使控制设备展示全景图像;
176.获取模块705,用于获取控制设备发送的控制指令。
177.可选地,控制单元703,还用于根据控制指令,控制执行组件转动到指向目标方向的位置,以使执行组件向目标方向执行目标操作。
178.可选地,执行设备包括多个指向不同方向的执行组件;
179.控制单元703包括确定模块706和控制模块707;
180.确定模块706,用于根据控制指令,从多个指向不同方向的执行组件中确定目标执行组件,目标执行组件指向目标方向;
181.控制模块707,用于控制目标执行组件向目标方向执行目标操作。
182.可选地,执行组件为投射器;
183.控制单元703,还用于根据控制指令,控制投射器向目标方向投射目标物体。
184.可选地,执行设备还包括移动组件和喇叭组件;
185.投射器为投食器,目标物体为食物;
186.执行设备还包括:
187.指令获取单元708,用于获取控制设备发送的移动指令;
188.位置调整单元709,用于根据移动指令的指示,通过移动组件调整执行设备的位置;
memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
206.以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1