基于移动边端节点的城市视网膜系统的制作方法
基于移动边端节点的城市视网膜系统
(一)技术领域
1.本发明是模拟视神经网络的多层次边缘节点摄像分析平台,用于市域范围的图像解析与泛在监控。系统利用路灯网络设置主相机、边缘计算机与通讯组件,把路灯变成神经元节点,构筑覆盖市域的视觉专网。继而在行人、车辆及无人机设置分相机与边缘算力,形成可移动的边端感知节点。进一步,边端感知融合到神经元组成的视觉专网中,神经元通过手机信号连接城市大脑,建立基于多层次边缘计算的视网膜系统,完成图像分类识别的体系架构,实现多维度的边端感知,充分发掘泛在传感器的潜力,为智慧城市的视觉识别与网格监控奠定技术基础。
(二)
背景技术:
2.现有的视频监控系统,主要是用摄像头拍摄视频,经数据压缩后上传服务器,存储在硬盘中,然后通过各种算法对存储数据进行解析,获得有效结果后形成控制指令,再发到控制器实施管理。这一模式一直面临数据量大、检索不易及计算困难等挑战,归纳成三个问题:难存储、难检索、难识别。
3.首先是存储成本高,而且存的越久成本就越高;其次不能实时反馈,服务器把数据提出来做处理,实时性和准确性都差;再次无法协作识别,a摄像头录的信息,不见得在b摄像头上能对得上,识别准确率很低。这种“1
‑
1模式”越来越不适应智慧城市的管理要求。
4.注意到上述问题,本发明提出一种模拟视神经网络的多层次边缘节点感知平台,在路灯上设置主相机与边缘计算机,形成独立完成计算和存储的神经元节点,每个节点设定合理的服务半径,确保连接服务区内的边端相机,构成覆盖城市区域的视觉专网。本发明充分利用可移动的边端相机,模拟无所不在的视觉细胞,这些视觉细胞通过中继节点或其他边端相机,以数据中继方式连接神经元节点,如果不在中继范围,计算结果在进入某个服务区联网后再上传。本发明建立分布式的边缘节点感知网络,形成整体识别的视网膜架构,多维感知,协调解析,高效汇总,是全新的数字城市管理的基础设施。
(三)
技术实现要素:
5.在视网膜系统中,视觉细胞是基本单元,组成特定的边端感知区,负责接收视觉数据与组合形体。初步处理结果汇聚到视网膜中的神经元细胞,进行视觉矫正与最终成像,计算结果传输到大脑的功能区,最终形成包含明暗、色彩及体积的视觉感知。简而言之,视网膜是一套分级计算的体系,从初成像、结果矫正直到最终成像,每一步都有边端化计算处理,体系成员并不简单的收发数据,依赖于某个处理核心,而是分类识别,分步计算,总体协调,体现出边缘计算的特点。
6.视觉是人类的主要感知器,大脑约70%的外界数据来自视觉。与城市管理类比,视频监控设备就是城市的视觉。现代城市广泛安装视频设备,每天记录海量的图像信息,这些信息基本反映了城市运行的概况,也是精细管理的主要数据源。现有的视频记录模式,摄像机存储图像,然后发送到云中心,出了事才会回溯图像,还原事件原貌,以事后处理为主,缺
乏事前预警,完全没有体现出视觉的提前预测的优点,离真正的视网膜系统差的很远。
7.本发明依据边缘计算的原理,在视频监控系统中引入一系列边端计算节点,包括边视觉节点与端视觉节点,构成分级识别与分步计算的架构,再把这些节点融合到无线的视觉专网中,协调计算,整体成像,计算结果通过手机信号发送云中心,由城市大脑形成最终结果。
8.进一步,边视觉节点是固定设备,拍摄位置好,计算能力强,存储空间大,且设置上行与下行两个通讯链路,上行链路以专用信号连接其他节点,构成视觉主网,下行链路以公共频段信号(wifi/bluetoot h/zigbee
…
)连接服务区的边端相机,构成视觉分网。该类节点可以看作神经元,设有高品质相机与边缘计算机,具备全景拍摄与综合解析的能力,是本发明的主视觉设备。
9.路灯是沿街道均匀分布的基础设施,其间距在20~50米,其高度在9~12米,视野良好,供电可靠,是神经元节点最好的安装位置。本发明中,路灯上设置主相机、处理器、存储器及无线模块组成的边缘节点,主相机是带云台的全景相机,可360
°
旋转,处理器用于图片要素的识别计算,且处理其他节点的中继数据,存储器用于数据存储,包括本地数据与中继数据两部分,无线模块建立上行与下行两个通讯链路,神经元节点由上行链路互相连接,其间距为40~400米,下行链路的服务半径为20~200米,连接服务区内的的所有边端相机,同时兼顾主相机的拍摄效果。神经元节点可以与灯具一体化,也可以在灯具外独立安装。
10.进一步,路灯上的神经元节点形成线状监控网络,但由于建筑或树木的遮挡,不能实现对远离街道的面区域的监控,特别是人群聚集的广场、公园及绿道,存在视觉盲点。本发明设置多个可移动的端视觉节点,为自组网的边端相机,机内设有专项优化的图片分类算法,针对性的解析图片的特定要素,并通过下行链路与神经元节点通讯,行人、汽车或无人机都是边端相机的载体,可将视觉识别拓展到城市的任何角落。
11.识别的专项优化后,端视觉节点不需要很强的算力与带宽,电池供电且携带方便。管理员可以每天携带数字相机做巡查,志愿者可以用安装应用的手机担任视觉细胞,汽车可以安装摄像头弥补主相机的不足,无人机可以定期扫描特定区域采集相关视频。城市中无所不在的移动载体,能够最大限度的提高视觉专网的有效性与全面性。该类节点可以看作视觉细胞,具备专门特征的图片解析能力,是本发明的分视觉设备。
12.进一步,系统设有多层次数据中继模式,首先设立与神经元节点通讯的中继节点,负责连接其服务区的边端相机,其次每个边端相机都可互为中继,没有中继节点的地方,依靠行人或无人机充当中继路由,再者边端相机的计算结果在本地暂存,进入某个服务区完成联网后,发送给神经元节点。上述中继模式解决了远离街区的边端相机的联网问题,确保视觉专网的协调工作。
13.综上所述,本发明搭建了可拓展的城市视网膜系统,主网与分网形成整体,分工协作,共同组成点线面结合的视觉网络,依赖多层次边端节点的分布式算力,具备全面感知与事前预测能力,既能快速响应多层次的视频分析需求,又满足智慧城市的智能化感知的需要。
14.(四)有益效果
15.本发明利用路灯安装神经元节点,建立城市级的视觉主网,并充分利用移动载体设置边端相机,形成边端化的视觉分网,由此组成多层次边缘计算体系,模拟出视神经网
络。系统实现多维感知,协调解析,高效汇总,具有很高的计算效率与感知水平,充分发掘泛在传感器的潜力,为智慧城市的视觉识别与网格监控奠定技术基础。
(五)附图说明
16.以下结合附图对本发明加以说明,图1是本发明的神经元节点的结构与通讯示意图,图2是本发明的视网膜构成图和固定中继的实施例,图3是本发明的视觉专网示意图和边端相机专门化的实施例。
具体实施方式
17.图1说明神经元节点的构成。节点与灯具一体化,包含主相机1、处理器2、存储器3及无线模块4,主相机1是带云台的全景相机,可360
°
旋转,处理器2用于图片要素的识别计算,且处理其他节点的中继数据,存储器3用于数据存储,包括本地数据与中继数据两部分,无线模块4建立上行与下行两个通讯链路,神经元节点由上行链路互相连接,其间距为40~400米,下行链路的服务半径为20~200米,连接服务区内的所有边端相机5,同时兼顾主相机1的拍摄效果。该类节点也可在灯具外独立安装。
18.图2说明神经元节点与边端相机如何搭建视网膜系统。神经元节点6形成下行服务区8,中继节点7只有通讯功能,同样形成下行服务区,边端相机5散布在各下行服务区中,分别与对应的节点建立连接。下行服务区外的边端相机,可以连接服务区中的某个边端相机,以中继路由的方式与神经元节点或中继节点通讯。适当范围的专网中,其中一个神经元节点设置5g模块,通过电信基站连接云中心9,专网的计算结果以手机信号发送到城市大脑,构成完整的城市视网膜系统。
19.图2也是通过固定节点实施中继的实施例。中继节点7设在公园中,两者的间距同样为40~400米,与神经元的间距要求一致。中继节点7负责连接边端相机a与b,相机a在中继节点的服务区中,可以直连,相机b不在服务区内,它先连接相机a,通过相机a的接力,与中继节点7完成连接。根据区域感知需求,可以用神经元节点代替中继节点,既增加主视觉分析能力,又起到数据中继的作用。
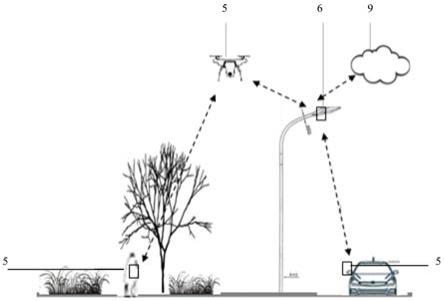
20.图3说明视觉专网的数据交换模式。神经元节点6设置在路灯上,覆盖街区范围,边端相机5以行人、汽车或无人机为载体,可拓展到街区外任何地方。下行服务区内的边端相机与神经元6直接通讯,区外的边端相机,可以先连接区内的某个相机,通过中继方式连接神经元。某个神经元节点设置5g模块,通过电信基站连接云中心9。
21.图3也是边端相机如何专项优化的实施例。管理员负责花草维护,边端相机提取人视线范围内的游客形态,监控破坏行为;汽车在道路中开行,边端相机提取道路中的行车状态,拍摄事故现场,边缘计算会忽略其他图片要素。这样的单项优化识别,对算力和通讯的要求都较低。图3还说明,管理员的相机不在神经元节点的服务区中,但可以先连接无人机,通过无人机的接力,与神经元节点完成连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1