光子波束成形单元、发射系统和接收系统的制作方法
1.本公开涉及光子波束成形领域,特别是涉及一种光子波束成形单元、光子波束成形发射系统和光子波束成形接收系统。
背景技术:
2.波束成形,或成为波束赋形、空域滤波,是一种使用传感器阵列定向发送和接收信号的信号处理技术。波束成形技术通过调整相位阵列的基本单元的参数,使得某些角度的信号获得相长干涉,而另一些角度的信号获得相消干涉。波束成形既可以用于信号发射端,也可以用于信号接收端,在雷达、通信系统、射电天文学等领域具有广泛的应用。
3.在相关技术中,波束成形是通过电域波束成形网络实现某个给定方向的信号的发射或接收。基于光子技术的波束成形网络仍然具有广阔的研究前景。
技术实现要素:
4.提供一种缓解、减轻或者甚至消除上述问题中的一个或多个的机制将是有利的。
5.根据本公开的一方面,提供了一种光子波束成形单元,包括:第一端口;光学干涉单元的网络,包括多个光学互连的光学干涉单元,多个光学互连的光学干涉单元被配置使得光学干涉单元的网络用作光学矩阵乘法器,光学矩阵乘法器具有用于光子波束成形发射和光子波束成形接收中的一者的传输矩阵;以及第二端口,经由光学干涉单元的网络与第一端口光学耦接,用于光子波束成形发射的传输矩阵将第一端口处的第一阵列的输入光学信号转换成第二端口处的第二阵列的输出光学信号,第二阵列的输出光学信号中的输出光学信号彼此具有等相位差;用于光子波束成形接收的传输矩阵将第二端口处的第三阵列的输入光学信号转换成第一端口处的第四阵列的输出光学信号,第四阵列的输出光学信号中的输出光学信号分别对应不同的方向角。
6.根据本公开的另一方面,提供了一种光子波束成形发射系统,包括:如上所述的光子波束成形单元,其中,光学干涉单元的网络的传输矩阵用于光子波束成形发射;光源,与第一端口光学耦接,用于产生第一阵列的输入光学信号;以及天线单元,与第二端口光学耦接,用于发射第二阵列的输出光学信号。
7.根据本公开的另一方面,提供了一种光子波束成形接收系统,包括:如上所述的光子波束成形单元,光学干涉单元的网络的传输矩阵用于光子波束成形接收;天线单元,与第二端口光学耦接,用于从接收信号中拾取第三阵列的输入光学信号,第三阵列的输入光学信号中的光学信号具有第一方向角;接收器单元,与第一端口光学耦接,用于探测第四阵列的输出光学信号中的光学信号的相应光强,第四阵列的输出光学信号中的每个光学信号的光强反比于该光信号对应的方向角与第一方向角之差。
8.根据在下文中所描述的实施例,本公开的这些和其它方面将是清楚明白的,并且将参考在下文中所描述的实施例而被阐明。
附图说明
9.在下面结合附图对于示例性实施例的描述中,本公开的更多细节、特征和优点被公开,在附图中:
10.图1是根据本公开示例性实施例的光子波束成形单元的结构的示意性视图;
11.图2是根据本公开另一示例性实施例的光子波束成形单元的结构的示意性视图;
12.图3是根据本公开示例性实施例的光子波束成形发射系统的示意性框图;
13.图4是根据本公开示例性实施例的在图3的光子波束成形发射系统中的单波长光源的示意性框图;
14.图5是根据本公开示例性实施例的在图3的光子波束成形发射系统中的多波长光源的示意性框图;
15.图6是根据本公开示例性实施例的光子波束成形接收系统的示意性框图;
16.图7是根据本公开示例性实施例的在图6的光子波束成形接收系统中的单波长光信号接收器单元的示意性框图;
17.图8是根据本公开示例性实施例的在图6的光子波束成形接收系统中的多波长光信号接收器单元的示意性框图;
18.图9是根据本公开示例性实施例的光子波束收发系统的示意性框图。
具体实施方式
19.将理解的是,尽管术语第一、第二、第三等等在本文中可以用来描述各种元件、部件、区、层和/或部分,但是这些元件、部件、区、层和/或部分不应当由这些术语限制。这些术语仅用来将一个元件、部件、区、层或部分与另一个元件、部件、区、层或部分相区分。因此,下面讨论的第一元件、部件、区、层或部分可以被称为第二元件、部件、区、层或部分而不偏离本公开的教导。
20.诸如“在
…
下面”、“在
…
之下”、“较下”、“在
…
下方”、“在
…
之上”、“较上”等等之类的空间相对术语在本文中可以为了便于描述而用来描述如图中所图示的一个元件或特征与另一个(些)元件或特征的关系。将理解的是,这些空间相对术语意图涵盖除了图中描绘的取向之外在使用或操作中的器件的不同取向。例如,如果翻转图中的器件,那么被描述为“在其他元件或特征之下”或“在其他元件或特征下面”或“在其他元件或特征下方”的元件将取向为“在其他元件或特征之上”。因此,示例性术语“在
…
之下”和“在
…
下方”可以涵盖在
…
之上和在
…
之下的取向两者。诸如“在
…
之前”或“在
…
前”和“在
…
之后”或“接着是”之类的术语可以类似地例如用来指示光穿过元件所依的次序。器件可以取向为其他方式(旋转90度或以其他取向)并且相应地解释本文中使用的空间相对描述符。另外,还将理解的是,当层被称为“在两个层之间”时,其可以是在该两个层之间的唯一的层,或者也可以存在一个或多个中间层。
21.本文中使用的术语仅出于描述特定实施例的目的并且不意图限制本公开。如本文中使用的,单数形式“一个”、“一”和“该”意图也包括复数形式,除非上下文清楚地另有指示。将进一步理解的是,术语“包括”和/或“包含”当在本说明书中使用时指定所述及特征、整体、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、整体、步骤、操作、元件、部件和/或其群组的存在或添加一个或多个其他特征、整体、步骤、操作、元件、部件
和/或其群组。如本文中使用的,术语“和/或”包括相关联的列出项目中的一个或多个的任意和全部组合,并且短语“a和b中的至少一个”是指仅a、仅b、或a和b两者。
22.将理解的是,当元件或层被称为“在另一个元件或层上”、“连接到另一个元件或层”、“耦合到另一个元件或层”或“邻近另一个元件或层”时,其可以直接在另一个元件或层上、直接连接到另一个元件或层、直接耦合到另一个元件或层或者直接邻近另一个元件或层,或者可以存在中间元件或层。相反,当元件被称为“直接在另一个元件或层上”、“直接连接到另一个元件或层”、“直接耦合到另一个元件或层”、“直接邻近另一个元件或层”时,没有中间元件或层存在。然而,在任何情况下“在
…
上”或“直接在
…
上”都不应当被解释为要求一个层完全覆盖下面的层。
23.本文中参考本公开的理想化实施例的示意性图示(以及中间结构)描述本公开的实施例。正因为如此,应预期例如作为制造技术和/或公差的结果而对于图示形状的变化。因此,本公开的实施例不应当被解释为限于本文中图示的区的特定形状,而应包括例如由于制造导致的形状偏差。因此,图中图示的区本质上是示意性的,并且其形状不意图图示器件的区的实际形状并且不意图限制本公开的范围。
24.除非另有定义,本文中使用的所有术语(包括技术术语和科学术语)具有与本公开所属领域的普通技术人员所通常理解的相同含义。将进一步理解的是,诸如那些在通常使用的字典中定义的之类的术语应当被解释为具有与其在相关领域和/或本说明书上下文中的含义相一致的含义,并且将不在理想化或过于正式的意义上进行解释,除非本文中明确地如此定义。
25.如本文使用的,术语“衬底”可以表示经切割的晶圆的衬底,或者可以指示未经切割的晶圆的衬底。类似地,术语芯片和裸片(die)可以互换使用,除非这种互换会引起冲突。应当理解,术语“层”包括薄膜,除非另有说明,否则不应当解释为指示垂直或水平厚度。
26.在波束成形技术中,为了在某个给定的方向发送或接收信号,将调节待发射或接受的信号的相位和幅度,使得给定方向的信号相长干涉,其他方向的信号相消干涉,从而实现定向信号的发送与接收。在相关的电域波束成形网络中,使用电移相器进行相位调控,存在波束偏移、带宽受限等问题,限制了其在高分辨率雷达测量、成像等领域中的应用。
27.光子技术具有大宽带、低损耗、低功耗、小尺寸、抗电磁干扰能力强等优点,可以克服电子波束成形技术的限制。在相关技术中,光控波束成形网络方案包括色散结构和光学延迟线等,存在系统结构复杂、集成度低等问题。同时发射与接收时,需通过扫描移相器或延迟线参数来调整发射或接收时的方向角,以串行的工作方式进行波束成形处理,速度较慢,无法充分发挥光子技术在波束成形应用中的优势。
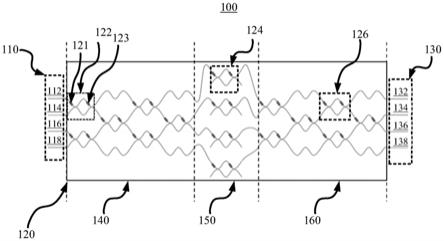
28.图1是根据本公开示例性实施例的光子波束成形单元100的结构的示意性视图。如图1所示,光子波束成形单元100包括第一端口110、光学干涉单元的网络120和第二端口130。
29.在一些示例性实施例中,第一端口110包括4个端口112、114、116和118。从4个端口112、114、116和118输入的光信号组成第一端口110处的第一阵列的输入光学信号。示例性地,第一阵列的光学信号可以包括从端口112、114、116或118中的任一个输入的单一波长的光信号,还可以包括从输入端口112、114、116或118中的多个输入端口分别输入的多个不同波长的光信号。
30.在一些示例性实施例中,光学干涉单元的网络120是由干涉单元构造得到的网络。示例性地,光学干涉单元的网络120包括多个光学互连的光学干涉单元,例如光学干涉单元122、124、126等。多个光学互连的光学干涉单元被配置使得光学干涉单元的网络120用作光学矩阵乘法器。光学矩阵乘法器具有用于光子波束成形发射和光子波束成形接收中的一者的传输矩阵。
31.在一些示例性实施例中,第二端口130包括端口132、134、136和138,并且经由光学干涉单元的网络120与第一端口110光学耦接。
32.在一些示例性实施例中,当光学干涉单元的网络120用于光子波束成形发射,传输矩阵将第一端口110处的第一阵列的输入光学信号转换成第二端口130处的第二阵列的输出光学信号,并且第二阵列的输出光学信号中的输出光学信号彼此具有等相位差。示例性地,第二阵列的输出光学信号中的输出光学信号具有等相位差可以是从第二端口130的4个端口132、134、136和138输出各个光学信号之间的相位成等差数列形式。
33.在一些示例性实施例中,当光学干涉单元的网络120用于光子波束成形接收,传输矩阵将第二端口130处的第三阵列的输入光学信号转换成第一端口110处的第四阵列的输出光学信号,并且第四阵列的输出光学信号中的输出光学信号分别对应不同的方向角。
34.在一些示例性实施例中,多个光学互连的光学干涉单元122、124、126等中的每一个可以是马赫
‑
曾德尔干涉仪(mzi)。mzi可以包括第一移相器模块,用于改变mzi的分束比。第一移相器模块可以包括一个或两个第一移相器。例如,图1中示出了一个第一移相器121。mzi还可以包括第二移相器模块,用于将mzi的一个输出的相位进行移位。第二移相器模块可以包括一个或两个第二移相器。例如,图1中示出了一个第二移相器123。多个光学互连的光学干涉单元中的mzi的第一和第二移相器模块被配置使得光学矩阵乘法器具有传输矩阵。示例性地,当光学干涉单元的网络120用于光子波束成形发射,可以配置mzi网络中各个移相器的参数,以使得由第一端口110输入的第一阵列的输入光学信号,经由光学干涉单元的网络120所具有的传输矩阵运算后,可以转换成在第二端口130处的具有等相位差的第二阵列的输出光学信号。在另一些示例性实施例中,当光学干涉单元的网络120用于光子波束成形接收,可以配置mzi网络中的各个移相器的参数,以使得在第二端口130输入的光学信号经由传输矩阵运算后,转换成在第一端口110处的分别对应不同方向角的光学信号。
35.在一些示例性实施例中,每个mzi可以包括两个输入臂、两个干涉臂和两个输出臂。两个干涉臂中的至少一个上设置有第一移相器模块的一个第一移相器,并且两个输入臂中的至少一个上或者两个输出臂中的至少一个上设置有所述第二移相器模块的一个第二移相器。示例性地,如图1所示,光子干涉单元122的第一移相器模块的一个第一移相器121设置于一个输入臂上并且第二移相器模块的一个第二移相器123设置于一个干涉臂上,以对输入到光子干涉单元122的光信号进行移相操作。
36.在一些示例性地实施例中,移相器例如第一移相器模块的一个或两个第一移相器和第二移相器模块的一个或两个第二移相器可以分别是是电光移相器、热光移相器、铌酸锂移相器、相变材料移相器等。
37.在一些示例性实施例中,多个光学互连的光学干涉单元中的每一个包括从光子晶体和环形谐振器组成的组中选择的一项。
38.综上所述,光子波束成形单元100通过配置光学干涉单元的网络120用作光学矩阵
乘法器,能够用于光子波束成形发射或接收,并以并行方式工作,提升波束发射或接收的处理速度。另一方面,通过构建mzi型光学干涉单元网络,可以调整每个mzi的移相器参数来实现对传输矩阵中各个元素的调节,进而改善传输矩阵的灵活性和多样性以满足不同发射或接收目的。
39.继续参照图1,在另一些示例性实施例中,光学干涉单元的网络120包括彼此级联的第一子网络140、第二子网络150和第三子网络160,并且多个光学互连的光学干涉单元中的各马赫
‑
曾德尔干涉仪被配置使得第一子网络140、第二子网络150和第三子网络160分别具有对网络120的传输矩阵进行奇异值分解而得到的第一酉矩阵、对角矩阵和第二酉矩阵作为各自的传输矩阵。示例性地,对于一个2*2基本干涉单元,可以使用2*2酉矩阵来描述:
[0040][0041]
其中θ和为移相器参数。多个不同mzi以一定的几何拓扑形式相互连接构成一个网络(例如如图1所示的几何拓扑形式所构成的网络),这个mzi网络可以基于特定的数学方法实现对任意n
×
p传输矩阵的表示(例如,图1中的mzi网络可以表示任意的4
×
4传输矩阵)。因此,根据本技术实施例的mzi网络可以作为光学矩阵计算单元实现输入光信号与任意n
×
p传输矩阵相乘的运算。
[0042]
在一些示例性实施例中,光学干涉单元的网络120是由奇异值分解构造的网络,可以实现任意复数传输矩阵。任意复数传输矩阵m通过奇异值分解方法分解为两个酉矩阵(分别记作酉矩阵u、和酉矩阵v
t
)和一个对角矩阵σ的相乘,即m=uσv
t
。由于对角矩阵也可以由mzi来表示,因此通过级联三个不同的mzi网络构成的光子矩阵计算单元能够执行任意矩阵乘法。示例性地,一个4
×
4的传输矩阵可以包括16个光学干涉单元。
[0043]
综上所述,光学干涉单元的网络120被配置为彼此级联的第一网络140、第二网络150和第三网络160,并且第一网络140和第三网络160为酉矩阵,第二网络150为对角矩阵。通过分别调控组成第一网络140、第二网络150和第三网络160的各个光学干涉单元中的移相器的参数,可以实现任意复数传输矩阵,从而提高光子波束成形单元的多样性和灵活性。
[0044]
图2是根据本公开另一示例性实施例的光子波束成形单元200的结构的示意性视图。图2与图1中相似的附图标记表示相似的元件,在此不再赘述。如图2所示,光学干涉单元的网络220包括6个光学干涉单元222、224、226等。多个光学互连的光学干涉单元可以包括mzi并且各mzi被配置使得传输矩阵为酉矩阵。示例性地,可以调整各mzi的移相器的参数,使得4
×
4的传输矩阵的4个行向量可以组成一组四维复数空间的正交基,4个列向量也可以组成一组四维复数空间正交基。
[0045]
综上所述,光子波束成形单元200通过配置光学干涉单元的网络220的传输矩阵为酉矩阵,可以有效减少所需光学干涉单元的数量,从而降低功耗。
[0046]
图3是根据本公开示例性实施例的光子波束成形发射系统300的示意性框图。如图3所示,光子波束成形发射系统300包括光子波束成形单元310、光源320和天线单元330。
[0047]
光子波束成形单元310包括如图1、图2所示的或各个实施例所描述的光子波束成
形单元,并且其中的光学干涉单元的网络的传输矩阵被配置为用于光子波束成形发射。
[0048]
光源320与光子波束成形单元310的第一端口光学耦接,用于产生第一阵列的输入光学信号。示例性地,光源320可以产生具有单一波长的第一阵列的输入光信号e
in
:
[0049][0050]
示例性地,通过调整光子波束成形单元310中各个光学干涉单元的参数,可以配置传输矩阵m1为:
[0051][0052]
其中,不同的值分别对应不同发射方向角θ
k
,k=1,2,3,4。
[0053]
天线单元330与光子波束成形单元310的第二端口耦接,用于发射第二阵列的输出光学信号。示例性地,通过传输矩阵的第一阵列的输入光信号e
in
被变换为第二阵列的输出光信号e
out
:
[0054][0055]
其中,第二阵列输出光信号e
out
具有等相位差进一步,具有等相位差的e
out
通过天线单元330输出,并在空间中发生干涉进而以方向角θ1发射。
[0056]
在一些示例性实施例中,还可以调节光子波束成形单元310以实现第二阵列的输出光学信号的振幅与相位同时调节,示例性地,可以配置传输矩阵m
′1:
[0057][0058]
在一些示例性实施例中,天线单元330可以包括从以下各项所组成的组中选择的一项:直接发射第二阵列的输出光学信号的光学天线单元和将第二阵列的输出光学信号转换成微波信号进行发射的微波天线单元。
[0059]
在一些示例性实施例中,光子波束成形发射系统300还包括电子控制器340,用于配置光子波束成形单元310中的多个光学互连的光学干涉单元使得光学干涉单元的网络具有所期望的传输矩阵。
[0060]
综上所述,通过利用本技术实施例所公开的光子波束成形单元来构成光子波束成形发射系统300,可以从天线单元330发射具有等差相位的第二阵列的输出光信号。所输出的光信号由于具有等差相位而在空间中发生干涉,从而实现以特定角度发生光信号。
[0061]
图4是根据本公开示例性实施例的可以用作图3的光子波束成形发射系统300中的光源320的单波长光源400的示意性框图。如图4所示,单波长光源400包括激光器410、调制
器420和1
×
n光开关430。激光器410用于产生具有单一波长的光输出。调制器420与激光器410光学耦接,用于调制所产生的光输出。1
×
n光开关430与调制器420光学耦接,用于将经调制的光输出引导至1
×
n光开关430的n个输出端中的任一个,作为光子波束成形发射系统300中的光子波束成形单元310的第一阵列的输入光信号。示例性地,当经调制的光信号从1
×
n光开关430中的第i个端口输出,则可以实现光信号以θ
i
的角度发射。
[0062]
综上所述,单波长光源400产的光信号通过1
×
n光开关430可以从从任意端口输入到光子波束成形单元,从而实现以任意角度发射该光信号,提高了发射系统的灵活性和可控制性。
[0063]
在一些示例性实施例中,光源可以使用多个波长不同的激光器。图5是根据本公开示例性实施例的可以用作图3的光子波束成形发射系统300中的光源320的多波长光源500的示意性框图。如图5所示,多波长光源500包括多个激光器(510
‑
1至510
‑
n),用于产生具有相应波长的相应多个光输出,和多个调制器(520
‑
1至520
‑
n),与多个激光器中的相应激光器光学耦接,用于调制多个光输出,且并行地输出经调制的多个光输出作为第一阵列的输入光学信号。
[0064]
示例性地,n个激光器的输出波长分别为λ1,λ2,
…
,λ
n
。在一些示例性实施例中,可以配置光子波束成形单元以实现4
×
4任意复数传输矩阵,例如传输矩阵m1。当第一阵列输入光信号为4路,即e
in
=[e
in1
(λ1),e
in2
(λ2),e
in3
(λ3),e
in4
(λ4)]
t
,且每路光信号波长不同,则此时输出的第二阵列的输出光信号为:
[0065][0066]
可见,对于任意波长λ
k
,其具有相位差k=1,2,3,4。由于具有不同波长的信号互不干扰,从而可以实现多波长多角度的波束成形。
[0067]
综上所述,多波长光源500可以产生具有多个不同波长的光信号,通过光子波束成形单元310,不同波长的光信号中的每一个可以分别被转换为具有等差相位的光信号并且并行输出,从而实现多个不同波长同时以不同的角度发射,大大提高了光子波束成形发射系统的实用性和灵活性。
[0068]
图6是根据本公开示例性实施例的光子波束成形接收系统600的示意性框图。如图6所示,光子波束成形接收系统600包括光子波束成形单元610、天线单元620和接收器单元630。
[0069]
光子波束成形单元610包括如图1、图2所示的或各个实施例所描述的光子波束成形单元,并且其中的光学干涉单元的网络的传输矩阵被配置为用于光子波束成形接收。
[0070]
天线单元620与第二端口光学耦接,用于从接收信号中拾取第三阵列的输入光学信号,并且第三阵列的输入光学信号中的光学信号具有第一方向角θ0。
[0071]
接收器单元630,与第一端口光学耦接,用于探测第四阵列的输出光学信号中的光学信号的相应光强,并且第四阵列的输出光学信号中的每个光学信号的光强反比于该光学信号对应的方向角与所述第一方向角θ0之差。
[0072]
示例性地,输入的光信号可以是直接通过光学天线接收得到的光信号,也可以是
由微波天线接收得到的微波信号通过电光转换加载在光波上得到的光信号。
[0073]
在一些示例性实施例中,当具有第一方向角θ0的输入的光信号为单一波长时,的输入的光信号为单一波长时,可以设置光子波束成形单元610的传输矩阵m2为:
[0074][0075]
经传输矩阵m2变换得到的第四阵列的输出光信号中的输出光信号e
out
分别对应θ1,θ2,θ3和θ4:
[0076][0077]
并且每个输出光信号的光强反比于该光信号所对应的角度θ
k
与θ0之差,k=1,2,3,4。通过接收器单元630探测输出光信号e
out
中各个光信号的光强,能够实现对输入光信号的第一方向角θ0范围的确定。
[0078]
在一些示例性实施例中,光子波束成形接收系统600中的光子波束成形单元610的传输矩阵可以是酉矩阵。示例性地,可以配置光子波束成形单元610以实现图2所示的4
×
4酉矩阵。4
×
4酉矩阵的4个行向量可以组成一组四维复数空间的正交基,4个列向量也可以组成一组四维复数空间正交基。接收到的第三阵列的输入光学信号经光子波束成形单元610的酉传输矩阵处理,等价于在在4个行向量或列向量组成的四维复数空间的不同正交基中的投影。由于来自不同第一方向角θ0的输入信号在不同正交基的投影图样各不相同。通过不同的图样可以分析出输入光信号所包含的第一方向角等信息。
[0079]
在一些示例性实施例中,光子波束成形接收系统600还包括电子控制器640,用于根据第四阵列的输出光学信号中的光学信号的所探测的相应光强,来配置光子波束成形单元610中的多个光学互连的光学干涉单元,以便适配光学干涉单元的网络的传输矩阵。
[0080]
综上所述,光子波束成形接收系统600通过配置光子波束成形单元610,将输入的光信号变换为第四阵列的输出光信号,并且每个光信号对应一个角度。通过接收器单元630探测各个光信号的角度,从而实现对输入光信号角度范围的确定。光子波束成形接收系统600由于并行判断输入光信号的角度范围,从而提高了对输入光信号的处理速度。
[0081]
图7是根据本公开示例性实施例的可以用作图6的光子波束成形接收系统600中的接收器单元630的单波长光信号接收器单元700的示意性框图。如图7所示,第三阵列的输入光学信号包括具有单一波长的光学信号,并且接收器单元700包括多个光探测器(710
‑
1至710
‑
n),用于探测第四阵列的输出光学信号中的相应光学信号的光强。示例性地,光探测器可以将输入的光信号转换为电信号。
[0082]
在一些示例性实施例中,经由光探测器输出的电信号可以通过ad转换再交由电子芯片(例如图6的电子控制器640)进行处理,或者也可以进行直接通过预设的阈值进行判决,例如当第四阵列的输出光信号中的一个光信号的光强大于阈值,则得到数字信号1,否
则得到数字信号0。示例性地,当有两个第四阵列的输出光信号输出为1时,可以根据该两个输出光信号所对应的方向角,来判断输入射信号的第一方向角θ0的范围。例如,当第四阵列的输出信号中对应于θ1与θ2方向角的输出信号的光强经处理得到数字信号1,而对应于θ3与θ4方向角的输出信号的光强经处理得到数字信号0,则可以判断θ0在θ1和θ2之间,例如θ1<θ0<θ2。
[0083]
在一些示例性实施例中,可以通过电子控制器640调控光子波束成形单元610的传输函数,进一步缩小入射光的第一方向角θ0与对应光子波束成形单元设置参数之间的误差,直至满足计算需求。例如,在判断θ1<θ0<θ2后,可以通过调整光子波束成形单元610的干涉单元的参数,改变传输矩阵m2中至相应地θ1至θ4也被改变。示例性地,可以改变θ1至θ4为θ
′1至θ
′4,并使得θ
′1=θ1,θ
′4=θ2。进一步地,通过再次处理第四阵列光信号的光强,得到对应θ
′1至θ
′4方向角的数字信号,从而能够进一步判断入射角θ0的范围。
[0084]
综上所述,具有单波长光信号接收器单元700的光子波束成形接收系统600可以实现n个方向角的光学波束成形单元的同时运算。光子波束成形单元610的结构取得n倍于串行方法的处理速度。也可以通过扩大光子波束成形单元610的规模,使得可以一次性获得计算结果。在一些示例性实施例中,使用相变材料作为移相器,则可以实现零功耗光学波束成形处理。
[0085]
图8是根据本公开示例性实施例的可以用作图6的光子波束成形接收系统600中的接收器单元630的多波长光信号接收器单元800的示意性框图。如图8所示,第三阵列的输入光学信号包括具有多个波长(λ1,λ2…
λ
p
)的光学信号。多波长光信号接收器单元800包括多个解复用器(820
‑
1至820
‑
n)和多个光探测器阵列(810
‑
1至810
‑
n)。每个解复用器用于从第四阵列的输出光学信号中的一个相应光学信号中解复用出多个波长的输出光学信号。多个光探测器阵列与多个解复用器中的相应解复用器光学耦接,每个光探测器阵列用于探测来自多个解复用器中的一个相应解复用器的具有多个波长的输出光学信号的光强。示例性地,具有p种波长的光信号810,通过解复用器后,被解复用为分别对应于λ1至λ
p
的p种光信号。每一个光信号在经过光探测器阵列后被转换为电信号以探测该光信号的光强。
[0086]
综上所述,具有多波长光信号接收器单元800的光子波束成形接收系统600,可以实现对多波长的输入光信号中的各单一波长的光信号同时进行探测,扩展了光波束成形接收系统600的应用范围。
[0087]
图9是根据本公开示例性实施例的光子波束收发系统900的示意性框图。如图9所示,光子波束收发系统900包括如图1、图2所示的或各个实施例所描述的光子波束成形单元910、天线单元920、光源930、接收器单元940、光开关网络950和电子控制器960。天线单元920与第二端口光学耦接,用于发射第二阵列的输出光学信号和从接收信号中拾取第三阵列的输入光学信号。光源930,用于产生第一阵列的输入光学信号。接收器单元940,用于探测第四阵列的输出光学信号中的光学信号的相应光强。光开关网络950,包括多个光开关(光开关950
‑
1至950
‑
n),用于选择性地将光源930或接收器单元940光学耦接到第一端口。电子控制器960,用于控制光开关网络以使得光子波束收发系统在以下模式之间切换:发射模式,其中光源被光学耦接到第一端口;和接收模式,其中接收器单元被光学耦接到第一端口。可知,通过光开关网络930的切换,光子波束收发系统900能够同时实现例如光子波束发射系统和光子波束接收系统的功能。
[0088]
虽然在附图和和前面的描述中已经详细地说明和描述了本公开,但是这样的说明和描述应当被认为是说明性的和示意性的,而非限制性的;本公开不限于所公开的实施例。通过研究附图、公开内容和所附的权利要求书,本领域技术人员在实践所要求保护的主题时,能够理解和实现对于所公开的实施例的变型。在权利要求书中,词语“包括”不排除未列出的其他元件或步骤,不定冠词“一”或“一个”不排除多个,并且术语“多个”是指两个或两个以上。在相互不同的从属权利要求中记载了某些措施的仅有事实并不表明这些措施的组合不能用来获益。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1