一种基于加权k近邻的信道状态信息指纹定位方法
1.本发明属于室内定位技术领域,具体涉及一种基于加权k近邻(weighted k-nearest neighbor,wknn)实现信道状态信息(channel state information,csi)指纹定位的改进方法。
背景技术:
2.目前,基于无线通信网络的定位技术,由于成本低廉、性能优良、部署便捷等原因,已成为主流的室内定位技术之一。基于无线网络的室内定位技术主要包括“测距/测角定位”和“指纹定位”两种方式。前者通常要求视距通信环境,通过测量诸如到达时间(toa,time of arrival)、到达时间差(tdoa,time difference of arrival)、到达角(aoa,angle of arrival)等方法实现目标定位。指纹定位则利用信号特征在空间中不同位置的特异性实现定位,由于信号指纹在视距或非视距场景下都有着较高的空间分辨率,因此指纹定位逐渐成为了室内定位领域的研究热点。
3.指纹定位分为两个环节,分别是离线建库和在线定位。离线建库环节将采集空间中多个参考点的坐标和信号指纹,一一匹配生成离线指纹地图库。在线定位环节中,待测终端的位置估计可以建模成分类或回归问题。通过回归模型实现定位时,往往需要借助神经网络强大的拟合能力(参考文献1:khatab z e,hajihoseini a,ghorashi s a.a fingerprint method for indoor localization using autoencoder based deep extreme learning machine[j].ieee sensors letters,2017.),但是在实际系统中,经常会出现距离较远的参考点具有相似信号指纹的情况,这将导致该类方法的性能大受影响。并且,为了达到较高的定位精度,该方法的训练、调参过程都过于繁琐和耗时。
[0004]
在基于分类的定位算法中,将待测终端划分到一个或多个已知的类别中。然而,在大面积室内环境或高密度参考点的场景下,分类定位算法将面临因类别数过多而导致定位精度和实时性能下降等问题。knn(k-nearest neighbor)作为最常见的指纹匹配手段,可以被认为是特殊的分类算法:其类别数多达参考点数目,这保证knn算法具备高精度定位的能力;另外,分类过程只需要计算指纹之间的相似度,如此低计算复杂度保证了在线定位环节的实时性。但是,knn对召回的k个近邻点进行无差别的平均,这是该方法的弱点。基于wknn的定位技术针对待测点指纹与部分参考点指纹相近但实际距离相差较远的问题,可以通过设计合理的参考点加权系数提高定位精度(参考文献2:poulose a ,han d s.performance analysis of fingerprint matching algorithms for indoor localization[c]//international conference on artificial intelligence in information and communication(icaiic).2020.),该方法主要分为两部分:近邻点召回和近邻点加权。首先从指纹地图库中依据指纹向量相似度召回待测点的k个近邻参考点,然后对这些参考点的位置进行加权求和,最终得到待测点的位置估计。
[0005]
基于传统wknn的在线定位技术中,在召回近邻点时,由于两点之间信号指纹相似度越高(指纹向量距离越小)则位置往往越接近,因此常基于欧式距离或相关系数等指标寻
找近邻点,该方案具有不错的效果。当采用csi作为信号指纹时,csi包含幅度和相位信息,并且两点之间的向量相似度本身存在多种衡量方式,因此有必要寻求多种信息的高效融合方法。对于近邻点加权,knn算法对召回的k个近邻点进行无差别的平均加权,wknn作为对knn的改进,启发式地将k个近邻点的权重设计为指纹向量相似度的倒数,让距离待测点更近的参考点具有更高的权重,该方案明显优于knn。但是,如果能够为上述过程设计更为精密的权重分配算法,将有助于定位精度进一步提升。
技术实现要素:
[0006]
本发明针对目前wknn方法存在的上述问题,对在线定位算法wknn进行改进,提出了一种基于wknn实现csi指纹定位的方法,包括基于预测真实空间距离的近邻点召回方案,以及基于神经网络拟合加权系数的近邻点加权方案,实现了指纹定位的精度提升。
[0007]
本发明提供的一种基于加权k近邻的信道状态信息指纹定位方法,包括如下步骤:
[0008]
步骤1,离线构建指纹地图库;
[0009]
步骤2,离线训练wknn近邻点召回模型;
[0010]
步骤3,离线训练wknn近邻点加权模型;
[0011]
步骤4,在线定位时,首先利用训练好的近邻点召回模型预测指纹地图库中参考点与待测点的距离,选取距离最小的k个参考点作为近邻点,再利用训练好的近邻点加权模型预测k个近邻点的加权系数,最后对k个近邻点的位置进行加权求和确定待测点位置。
[0012]
所述步骤2中,采用基于预测真实空间距离的近邻点召回方案,具体为:利用机器学习模型学习两个样本点之间的真实距离,模型的输入是两样本点的csi的幅度向量和相位向量的多种距离度量,模型的输出是两样本点的真实距离;在线定位时,对模型预测得到的各个参考点到待测点的距离从小到大排序,选取最小的k个参考点作为近邻点。
[0013]
所述步骤2中,近邻点召回模型优选为拉索回归模型。
[0014]
所述步骤3中,采用基于神经网络拟合加权系数的近邻点加权方案,具体为:近邻点加权模型采用输出层为softmax的全连接神经网络,神经网络的输入特征是k个近邻点与待测点的指纹距离,神经网络的输出是k个近邻点的权重系数。在训练所述近邻点加权模型时,添加“距离越近,权重越大”的先验知识,计算获取训练样本标签,再利用训练样本集对所述近邻点加权模型进行训练。
[0015]
相对于现有技术,本发明的优点和积极效果在于:
[0016]
针对传统wknn算法的不足,本发明方法分别从其近邻点召回和近邻点加权两个步骤入手,分别针对性地提出改进:在近邻点召回环节中,通过机器学习模型将近邻点召回的目标设置为真实的空间距离而非指纹向量距离,提高近邻点召回质量;在近邻点加权环节中借助神经网络预测出k个近邻点的权重值,并且采用添加先验线性方程的形式改善神经网络输入输出相关性不足导致的收敛问题。最终,通过两个改进算法使得本发明的指纹定位精度得到了有效提升。
附图说明
[0017]
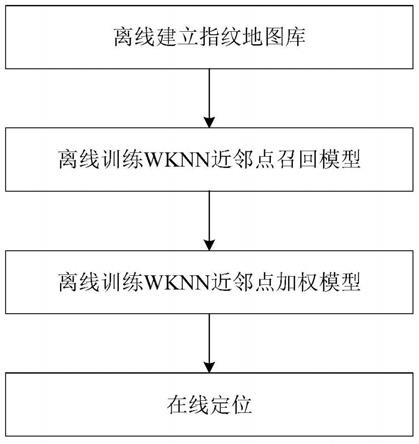
图1是本发明的基于wknn的csi指纹定位方法的整体流程图;
[0018]
图2是本发明的近邻点加权模型的网络结构示意图;
[0019]
图3是本发明方法与传统方法的定位精度的对比图。
具体实施方式
[0020]
下面结合附图和实施例对本发明技术方案进行详细说明。
[0021]
本发明的基于wknn的csi指纹定位方法,基于已经实现的csi指纹定位系统,如图1所示,主要包括以下四个步骤:
[0022]
第一步,离线构建指纹地图库。
[0023]
在构建指纹库时,需要采集空间中多个参考位置的csi,经过处理生成幅度向量和相位向量,作为该位置的信号指纹。然后将各个参考点的位置和信号指纹一对一地存储,得到指纹地图库。
[0024]
第二步,离线训练wknn近邻点召回模型。
[0025]
传统的wknn算法往往采用样本点指纹向量的欧氏距离、相关系数等指标作为近邻点召回依据,该方案显然无法有效融合csi的幅度和相位信息,并且单一的召回指标往往不如多种指标的有机结合。考虑到近邻点召回的真正意图是寻找与待测点真实距离接近的参考点,因此,本发明提出基于预测真实空间距离的近邻点召回方案,通过机器学习模型学习两个样本点之间的真实距离,模型的输入可以为两点之间csi幅度向量的多种距离和csi相位向量的多种距离。例如采用拉索回归作为近邻点召回模型,可以有效实现对多种输入信息的自动融合,同时拉索回归模型参数的稀疏性也保证了在线定位环节的实时性。在线定位时,对模型预测得到的各个参考点到待测点的距离从小到大排序,选取最小的k个参考点作为近邻点。k为正整数。
[0026]
首先构造训练样本:在指纹库中,任意两个参考点可以构造出一条训练样本。具体的,本发明计算两个参考点的空间距离,作为样本标签;对两个参考点分别计算幅度向量和相位向量的多种距离度量方式,例如相关系数,余弦相似度,不同参数的闵可夫斯基距离等,作为样本特征。
[0027]
然后训练近邻点召回模型:例如选取拉索回归作为近邻点召回模型,训练完成后保存模型的非零参数。
[0028]
对于上述预测样本点空间距离的任务,更一般的做法是把两点的指纹向量数据以及构造的交叉特征等都作为模型输入,选取复杂度较高的模型来完成该回归任务。但是这样的做法无疑会使在线定位的实时性能大受影响。实际上,两个样本点的指纹向量距离已经能够较好地表征它们之间的真实空间距离,其优化点在于如何对多种距离度量方式加权融合,并对无效特征进行剔除,因此带l1正则项的线性回归是不错的选择,该方法即拉索回归。本发明实施例中通过加入拉索回归模型,用于融合csi的多种信息,并且预测真实空间距离,提高了近邻点召回质量。
[0029]
第三步,离线训练wknn近邻点加权模型。
[0030]
现有技术中,近邻点的权重直接设置为指纹距离的倒数,让距离待测点更近的参考点具有更高的权重。本发明提出采用近邻点加权模型来改进近邻点的权重设置,以提高csi指纹定位精度。
[0031]
本发明的近邻点加权模型采用输出层为softmax的全连接神经网络,softmax输出的k个值分别为k个近邻点的权重系数,网络结构如图2所示,其中rpi(i=1,2,
…
k)代表第i
个参考点的输入特征,输入特征例如是和待测点的指纹相似度等,本发明实施例中每个参考点对应的输入特征是根据近邻点召回模型得到的重要性最高的四种指纹相似度;w1~wk为近邻点加权模型的输出值,分别代表k个近邻点的权重系数。需要注意的是,实际中k个近邻参考点的权重系数是未知的。
[0032]
期望权重系数wi满足下述方程组:
[0033][0034]
其中(xi,yi)为第i个参考点的位置坐标,(x0,y0)为待测点位置坐标,wi为softmax第i个输出值。
[0035]
最简单的方式是让softmax的输出值wi分别加权xi和yi,求和后分别得到预测的待测点坐标(x,y),然后再基于(x-x0)2+(y-y0)2的mse误差训练神经网络。但是,实际中该方法效果不佳。具体的,将wi视为变量,则上述过程实际上只为这k个变量提供了三个线性约束。在一般情况下,k的值超过3,因此上述方程组处于欠定状态,可能存在无穷多组解,并且绝大多数的解会出现某个参考点与待测点距离较近但是其权重系数wi反而较小的情况,此时模型的输入和输出将失去相关性,网络难以较好地训练并收敛。
[0036]
因此,可以添加“距离越近,权重越大”的先验知识,设di表示第i个参考点到待测点的真实距离,则以第一个参考点为基准,先验知识可以表达为:w1/wi=di/d1,该方程移项后为wi的线性方程。这里k个参考点一共可以添加如下k-1个线性方程:
[0037][0038]
因此优化问题转化为如下带约束的最小二乘问题:
[0039]
min||aw-b||2[0040][0041]
其中
[0042][0043]
值得注意的是,只有在方程系数数量级相似的情况下,上述求解方法才能得到较
好的结果,因此建议对x0~xk和y0~yk分别进行归一化。
[0044]
上述方程的求解结果如下,其中λ为拉格朗日乘子。
[0045][0046]
在模型训练时,获取训练样本的标签,即待测点的k个近邻点的权重,可以按照上面求解过程进行求解,将上述求解结果作为训练样本的标签,即可训练近邻点加权模型的神经网络。
[0047]
第四步,在线定位。
[0048]
在线定位时,对于任意的待定位点,首先利用近邻点召回模型预测指纹地图库中参考点与待测点的距离,然后选取其中距离最小的k个点作为近邻点。将k个近邻点的特征输入近邻点加权模型中,预测出各个近邻点的加权系数,设第i个参考点的位置坐标为(xi,yi),权重系数为wi,则可以估计待测点的位置坐标为:
[0049][0050]
如图3所示,将本发明方法与传统csi指纹定位方法进行对比,传统方法中采用r0+w0的方案进行定位。r0代表基于指纹向量欧氏距离召回近邻点,w0代表将近邻点权重设置为指纹距离的倒数的方案。本发明方法中,设基于预测真实空间距离的近邻点召回方案为r1,利用神经网络预测近邻点权重系数的加权方案为w1。图3中,横坐标代表传统方法r0+w0、本发明方法r1+w1,以及将组合方案r1+w0、r0+w1;纵坐标代表对应方法的平均欧氏距离误差(euclidean distance error),单位是厘米。实验中k=5。实验结果表明,传统的wknn方法定位误差为10.22cm,基于本发明方法分别对近邻点召回和近邻点加权方案提出改进,对应的定位误差分别下降至8.95cm和9.33cm,同时对两个环节进行改进,即采用本发明方法时,最终定位误差为8.61cm,相较于原始方法,本发明方法的定位误差下降了15.75%。由此可以看出本发明方法对wknn指纹定位精度有明显改善。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1