一种无人机集群网络高稳定分簇方法
1.本发明涉及无人机集群分簇网络技术领域,具体涉及一种无人机集群网络高稳定分簇方法。
背景技术:
2.无人机通过装载各式各样的部件,不断扩充机载功能的同时各方面的性能也越来越强大,能够实现目标攻击、局部通信中继、火力引导、目标毁伤评估、预警侦察、电子对抗等多种复杂功能。进而无人机集群的地位也越来越受到重视,然后对无人机集群网络分簇结构的稳定性也提出了更高的要求,以适应复杂的环境。
3.经典的分簇方法存在一定的缺点,如没有考虑影响网络性能的因素、没有考虑节点的能量消耗以及对于动态性网络开销巨大等,不适合直接用于无人机集群网络。而国内外的学者根据其要实现的目标改进经典分簇方法,但也都存在一些问题,如计算量过大、增大节点能耗,降低了网络寿命等。
技术实现要素:
4.针对无人机集群网络结构不稳定以及网络生命周期短的问题,本发明提供一种高稳定分簇方法(high stability clustering optimization algorithm,hscoa),该方法使网络结构更加稳定,同时使得簇首分布均匀,均衡节点能耗,延长网络生命周期。
5.为实现上述目的,本技术提出一种无人机集群网络高稳定分簇方法,包括:
6.依据节点的速度和距离相似度对无人机集群网络的节点分簇,即将一定距离范围内相对静止的无人机节点分成一个簇;
7.根据节点剩余能量、最高节点度、通信情况、任务种类四个影响因素的联合度量指标,采用改进灰狼算法选取簇首;
8.在对无人机集群网络簇结构进行维护时采用周期性维护机制,确保在一个簇首选举周期内,由所述联合度量指标最高的节点担任簇首。
9.进一步的,依据节点的速度和距离相似度对无人机集群网络的节点分簇,即将一定距离范围内相对静止的无人机节点分成一个簇,具体为:
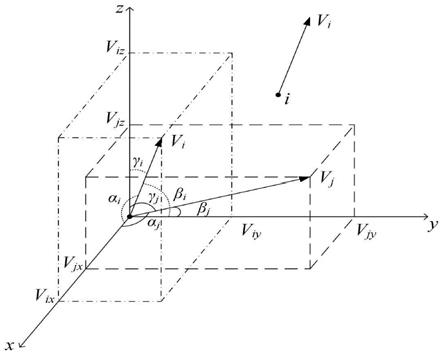
10.设节点i是节点j在下一跳通信范围内的任意节点,将节点速度的大小和运动方向在三维坐标系中计算,则节点i与节点j在x轴、y轴、z轴上的速度差如下所示:
[0011][0012][0013][0014]
其中,v
jx
、v
jy
、v
jz
为节点j在x、y、z轴上的速度;v
ix
、v
iy
、viz为节点i在x、y、z轴上的速度;αj、αi分别为节点j、i与x轴的夹角;βj、βi分别为节点j、i与y轴的夹角;γj、γi分别为节点j、i与z轴的夹角;
[0015]
则节点j与n个邻居节点i在x轴、y轴、z轴上的平均速度差为:
[0016][0017][0018][0019]
节点j与邻居节点i在x轴、y轴、z轴上的速度差的标准差为:
[0020][0021][0022][0023]
由勾股定理可知,节点j与邻居节点i的速度差的标准差如下所示:
[0024]
δ
jv2
=δ
jx2
+δ
jy2
+δ
jz2
ꢀꢀꢀ
(10)
[0025][0026]
设定速度差的标准差阈值为q,当速度差的标准差δ
jv
小于速度阈值q时,节点j与其邻居节点i在运动速度大小和运动方向上都具有相似性,即具有速度相似度。
[0027]
进一步的,设节点i为节点j在下一跳通信范围内的任意节点,则节点j与邻居节点i的距离差为:
[0028][0029]
其中,p
t
为节点发射功率;g
t
为发射天线增益;h
t
为发射天线高度;hr为接收天线高度;pr为节点接收功率;
[0030]
则节点j与n个邻居节点i的平均距离差的标准差为:
[0031][0032][0033]
其中,为节点j与n个邻居节点i的平均距离差;
[0034]
设定距离差的标准差阈值为p,当距离差的标准差δ
jd
小于距离阈值p时,节点j与其邻居节点i具有相似性,即具有距离相似度。
[0035]
进一步的,当节点速度差的标准差和距离差的标准差都小于对应速度阈值q和距离阈值p时,则认为节点j与其邻居节点i同时具有速度相似度和距离相似度,即节点j与其邻居节点i符合成簇条件;该成簇条件具有传递性,即节点j与节点i符合成簇条件,节点j与节点k符合成簇条件,那么节点i与节点k也符合成簇条件,即节点j、节点i、节点k成为一个簇;
[0036]
在初步分簇完成后,检测每个簇中节点个数,并设置每个簇中的最大允许节点个数为n
max
,以保证分簇的平衡度。
[0037]
进一步的,根据节点剩余能量、最高节点度、通信情况、任务种类四个影响因素的联合度量指标,采用改进灰狼算法选取簇首,具体为:
[0038]
在进行簇首选举时,如果某一节点的剩余能量e
res
小于所有邻居节点的平均能量e
avg
(所有邻居节点剩余能量之和除以邻居节点个数),则退出簇首的竞选;其中,剩余能量通过地面控制站获取;对剩余能量进行归一化处理,即剩余能量e
res
除以初始能量e0,归一化后的剩余能量e
τ
为:
[0039][0040]
进一步的,节点度是指节点在通信范围内邻居节点的个数;同一个网络中,节点度越高,簇首数量越少,网络时延越少;对节点度归一化处理即邻居节点数ni除以簇内总节点数ns,归一化后的节点度n
τ
为:
[0041][0042]
进一步的,节点通信成功的概率fs(i)取决于m次独立重复试验中通信成功的次数y和通信失败的次数n,则节点通信成功的概率fs(i)为:
[0043][0044]
其中,通信成功是在一个周期内收到了邻居节点的hello消息;通信失败是一个周期内,没有收到邻居节点的报文或收到链路断裂的错误信息;
[0045]
无人机执行的作战任务不同,其性能也各不相同;执行探测任务的无人机主要任务是搜集情报、观察目标区域,增强显示和预警能力;执行侦察任务的无人机是深入到地方防御纵深进行监视、目标指示和损伤评估等;执行救援任务的无人机是在其他无人机失效时代替其继续执行任务;执行打击任务的无人机则需携带攻击武器,对目标进行精准打击。因此,需要考虑无人机执行任务种类对簇首选举的影响,依据无人机任务种类的危险程度,设置节点簇首选举的优先级权t
τ
,如表1所示:
[0046]
表1任务种类与优先级权值
[0047][0048]
进一步的,根据节点i的剩余能量、邻居节点数、通信情况和任务种类,对4种影响因素进行加权求和;通过加权分簇算法综合考虑这4个因素得到的复合权值如下:
[0049]
mi=ω1e
τ
+ω2n
τ
+ω3fs(i)+ω4t
τ
ꢀꢀꢀ
(18)
[0050]
其中,ω1、ω2、ω3、ω4的取值范围为[0,1],并且满足ω1+ω2+ω3+ω4=1,其具体大小可以根据实际情况取值。
[0051]
进一步的,灰狼优化算法(greywolfoptimization,gwo)模拟自然界中灰狼的等级制度与狩猎行为,将灰狼群体划分为α狼、β狼、γ狼三个等级,在灰狼群体的搜索过程中,利用α狼、β狼、γ狼判断猎物的大概位置如下:
[0052][0053][0054][0055]
其中,d
α
、d
β
、d
γ
分别为α狼、β狼、γ狼与猎物的距离;c1、c2、c3是一个随机向量,分别为α狼、β狼、γ狼的搜索范围;x
α
(t)、x
β
(t)、x
γ
(t)分别为α狼、β狼、γ狼的当前位置;x为当前灰狼位置向量;a1、a2、a3是一个自适应向量分别为α狼、β狼、γ狼的攻击范围。
[0056]
进一步的,由于灰狼优化算法的α狼、β狼、γ狼共同影响猎物的位置,因此,需要对其采用权重分配策略;本发明改进的权重比例为:
[0057][0058]
[0059][0060]
其中,m1、m2、m3分别为改进灰狼算法中α狼、β狼、γ狼对猎物位置的权重影响因子,即α狼、β狼、γ狼对猎物位置的学习率;
[0061]
根据改进灰狼优化算法计算猎物位置如下:
[0062][0063]
x'(t+1)=m1x1+m2x2+m3x3ꢀꢀꢀ
(26)
[0064]
本发明采用灰狼算法对无人机网络的簇首选举进行优化,将狼群看作无人机集群网络,灰狼看作无人机集群网络中的节点,猎物看作每个簇的簇首。在每一个簇中,选择m值最大的三个节点,分别作为m1、m2、m3,根据式(26)计算出簇内所求的猎物,即为簇首。
[0065]
进一步的,在对无人机集群网络簇结构进行维护时采用周期性维护机制,确保在一个簇首选举周期内,由所述联合度量指标最高的节点担任簇首,具体为:
[0066]
簇首选举周期根据无人机集群网络拓扑变化程度而定,当无人机集群网络拓扑变化较慢时,则将选举周期适当延长,避免频繁重新选举簇首产生大量开销;当无人机集群网络拓扑变化较快时,则适当缩短簇首选举时间,避免因簇首失效造成簇结构与整个网络脱离。
[0067]
本发明采用的以上技术方案,与现有技术相比,具有的优点是:
[0068]
(1)本发明在簇的形成阶段增加了簇内节点个数检测,保证了簇首数目适中和分簇的平衡度。
[0069]
(2)本发明在采用灰狼算法选举簇首前增加了节点能量检测,大大减少了选举最佳簇首时的网络开销。
[0070]
(3)本发明采用改进灰狼优化算法选举簇首,保证了簇首分布均匀,改善了无人机集群网络因节点移动而导致的网络结构不稳定的问题,延长了网络生命周期。
附图说明
[0071]
图1为节点i与节点j速度差示意图;
[0072]
图2为本发明的流程图;
[0073]
图3为节点传输距离对簇首数目影响曲线图;
[0074]
图4为节点传输距离对簇依附关系变化次数影响曲线图;
[0075]
图5为节点传输距离对分簇平衡度影响曲线图;
[0076]
图6为仿真时间和统治集更新次数关系曲线图;
[0077]
图7为仿真轮数和生存节点个数关系曲线图。
具体实施方式
[0078]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术,即所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。
[0079]
因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护
的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0080]
实施例1
[0081]
如图2所示,本技术提供一种无人机集群网络高稳定分簇方法,具体步骤如下:
[0082]
step1:网络初始化,定义无人机集群网络中总节点个数为n;
[0083]
step2:根据节点的速度相似度和距离相似度对网络中的节点进行分簇;
[0084]
step3:判断簇内成员数量是否大于最大阈值n
max
;
[0085]
step4:当所有簇内成员个数都小于最大阈值时,初步完成分簇;
[0086]
step5:判断簇内各节点剩余能量e
res
是否大于簇内平均能量e
avg
;
[0087]
step6:当节点能量小于平均能量e
avg
,该节点退出竞选簇首;
[0088]
step7:根据节点剩余能量、最高节点度、通信情况、任务种类四个影响因素的联合度量指标,基于改进灰狼优化算法,选择最佳簇首。
[0089]
其中,簇的形成步骤如下:
[0090]
step1:判断速度标准差是否大于速度阈值q;
[0091]
step2:当速度标准差大于速度阈值q时,舍弃与节点j速度差最大的邻居节点i,并执行step1;否则执行step3;
[0092]
step3:判断距离标准差是否大于距离阈值p;
[0093]
step4:当距离标准差大于距离阈值p时,舍弃与节点j距离差最大的邻居节点i,并执行step3;否则执行step5;
[0094]
step5:判断小于速度阈值的节点和小于距离阈值的节点是否为相同节点;
[0095]
step6:当符合两个条件的节点为相同节点时,执行step7;
[0096]
step7:节点个数检测,判断每个簇中成员节点数是否小于等于最大允许节点个数n
max
;
[0097]
step8:当每个簇中成员节点数大于n
max
时,舍弃与节点j速度差和距离差之和最大节点,并执行step7;
[0098]
step9:当每个簇中成员节点数都小于等于n
max
时,完成分簇。
[0099]
将上述方法进行仿真,所用参数如表2所示。
[0100]
表2仿真参数
[0101][0102]
为体现本发明的优势,将本发明与最小id号分簇算法(low id clustering algorithm,lid)、最高节点度分簇算法(highest node degree clustering algorithm,hd)、加权分簇算法(weighted clustering algorithm,wca)、一种改进的多参数组合加权分簇算法(improved weighted clustering algorithm,iwca)四种分簇算法进行仿真对比,对比结果将从簇首数目、簇依附关系变化次数、分簇的平衡度、统治集更新次数和节点生存个数五个方面来体现。
[0103]
簇首数目的仿真结果如图3所示。对于一个网路来说,簇首数目过小时,簇首负担过大导致其存活时间过短,网络生命周期短;簇首数目过大时,簇间通信频繁,增加网络通信开销和端到端的延迟。因此,在分簇时,要保证簇结构数目适中,需满足文献sa
ú
l z m,abel g n,antonio l j.multi-objective grey wolf optimizer based on decomposition[j].expert systems with applications,2019,120(9):357-371.提出的最佳节点度的要求,即n为网络中节点个数,图中虚线表示最佳节点度要求的簇首数目。由图3可知,5种算法的簇首数目都随着节点传输距离的不断增加而减少且趋势逐渐变缓,即簇结构随着传输距离的增加而减少。由于hscoa算法在簇的初步形成时,进行簇内节点个数检测,使得簇首数目适中。综合来看,与lid、hd、wca算法相比hscoa算法的簇首数目更接近与最优值,但在节点传输距离超过20cm后略差于iwca算法。
[0104]
簇依附关系变化次数的仿真结果如图4所示。簇结构越稳定,簇依附关系变化次数越少。由图4可知,5种分簇算法的簇依附关系变化都随着节点传输距离先增加后减少。当传输距离较小时,节点脱离簇的概率较小,并随着节点传输距离的增大而增加。因为此时网络中簇结构多,每个簇的成员节点少,但随着传输距离的增加,簇结构减少,每个簇的成员节点多,节点脱离簇的概率随着传输距离的增大逐渐减少。由于hscoa算法在选举簇首时采用
改进灰狼优化算法,保证簇首分布均匀,其簇依附关系变化次数相比于其他四种分簇算法的更小,网络结构更稳定。
[0105]
分簇的平衡度的仿真结果如图5所示。分簇平衡度是指每个簇的节点个数基本相等,使得网络中簇分布相对均匀。本实验分簇算法平衡度采用标准差的方式来衡量,即每个簇所包含节点数的标准差,其值越小分簇算法越优越。由图5可知,5种算法的分簇平衡度都随着节点传输距离的增加而增加。随节点着传输距离的增大,簇结构减少,每个簇中的平均节点数会增加,从而导致每个簇所包含节点数的标准差增大,即平衡度增大。由于hscoa算法在初步分簇后进行节点个数检测,使得每个簇内的节点数大致相同,簇分布相对均匀,其分簇平衡度明显优于其他分簇算法。
[0106]
统治集更新次数的仿真结果如图6所示。统治集更新次数为单位时间内簇首更新次数,统治集更新次数越多,簇结构越不稳定,分簇算法在分簇过程中越会产生庞大的计算量和通信开销。由图6可知,5种算法的统治集更新次数都随着仿真时间的增加而增加。由于hscoa算法先对网络分簇,再进行簇首的选举,当成员节点失效时,不需要重新分簇、选举簇首,减少了统治集更新次数,因此,其统治集更新次数明显低于其他四种分簇算法,提高了整个网络的稳定性,降低了计算量,减少了网络开销。
[0107]
节点生存个数的仿真结果如图7所示。对于一个网络来说,随着仿真轮数的增加,生存节点个数越多,网络生命周期越长。由图7可知,5种算法生存节点个数都随仿真轮数增加而减少。wca、iwca、hscoa由于考虑了节点的剩余能量,因此经过相同轮数这三种算法的节点生存个数明显多于其他两种算法,但在iwca算法中节点剩余能量权重设置比较大且随邻居节点数变化,因此iwca算法优于wca算法。由于hscoa算法不仅考虑了节点的剩余能量,还采用了计算量小的灰狼优化算法选举簇首,而且采用周期性维护机制对簇进行维护,因此,hscoa算法最优,其网络生命周期最长。
[0108]
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1