一种面向5G智能电网的高精度时钟同步方法与流程
一种面向5g智能电网的高精度时钟同步方法
技术领域
1.本发明涉及通信技术领域,更具体的说是涉及一种面向5g智能电网的高精度时钟同步方法。
背景技术:
2.目前,国家电网正大力推动智能电网建设,迫切需要构建安全可信、接入灵活和双向实时互动的“泛在化、全覆盖”电力通信网络;5g通信以其大带宽、低时延、高可靠、广连接、泛在网等诸多优势,能够满足智能电网需求,5g+智能电网具有广阔的推广空间。
3.5g智能电网需要统一的时间基准和精确的时间信息来为实现“枢纽型、平台型、开放型”的电力物联网保驾护航,且时钟同步系统的精度水平关乎智能电网包括控制、通讯和传感技术在内的多项核心功能的实现。
4.ieee1588协议是由ieee1588-2002标准制定,简称ptp协议,ptp协议由于通用性好,实现成本低是5g智能电网建设中主流的精确时钟同步协议,但是ptp协议只规定了基本的时钟同步算法,在一些时间敏感网络中,往往不能达到智能电网系统对同步精度的要求。
5.因此,提出一种高精度时钟同步方法,以实现智能电网中节点间纳秒级的时钟同步精度是本领域技术人员亟需解决的问题。
技术实现要素:
6.有鉴于此,本发明提供了一种面向5g智能电网的高精度时钟同步方法,有效抑制了时钟同步误差,实现主从节点间纳秒级的时钟同步精度,可广泛应用于配电网差动保护、线路巡检、配电自动化和视频监控等智能电网场景。
7.为了实现上述目的,本发明采用如下技术方案:
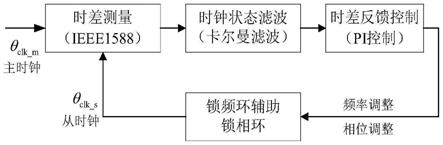
8.一种面向5g智能电网的高精度时钟同步方法,包括以下步骤:
9.s1.时差测量:获取主从节点的时钟相位偏差,并根据时钟相位差获得时钟频率偏差和时钟漂移;
10.s2.时钟状态滤波:根据s1中的时钟相位偏差、频率偏差和时钟漂移进行滤波估计;
11.s3.时差反馈控制:基于s2中的滤波估计,通过pi控制器输出从节点时钟的相位和频率的反馈控制量;
12.s4.锁频环fll辅助锁相环pll并输出目标时钟:利用s3中从节点时钟的相位和频率的反馈控制量,通过锁频环fll辅助锁相环pll输出目标时钟,以与主时钟保持同步。
13.优选的,s1的具体内容包括:
14.基于ieee1588精确时间同步协议,计算得到5g智能电网中主从节点间的时钟相位偏差θ
m_s
,通过时钟相位偏差θ
m_s
计算获得时钟频率偏差和时钟漂移。
15.优选的,s2的具体内容包括:采用卡尔曼滤波器估计时钟相位偏差、时钟频率偏差和时钟漂移;
16.卡尔曼滤波器建立的具体内容包括:
17.(1)根据时钟特性,建立时钟的相位、频率和漂移的模型;
18.(2)建立卡尔曼滤波的时差状态方程;
19.(3)建立卡尔曼滤波的时差观测方程;
20.(4)建立卡尔曼滤波器。
21.优选的,(1)中时钟的相位模型、频率模型和漂移模型分别为:
[0022][0023]
γ(k)=γ(k-1)+α(k-1)
·
δtu+ω
γ
(k-1)
[0024]
α(k)=α(k-1)+ω
α
(k-1)
[0025]
其中,δtu为时钟同步间隔,θ(k)为时钟相位偏差,γ(k)为时钟频率偏差,α(k)为时钟漂移,ω
θ
(k-1)为时钟的相位噪声,ω
γ
(k-1)为时钟的频率噪声,ω
α
(k-1)为时钟的漂移噪声。
[0026]
优选的,(2)中的时差状态方程为:
[0027]
x(k)=ax(k-1)+bu(k-1)+ω(k-1)
[0028]
其中:
[0029][0030][0031]
其中,x(k)=[θ(k),γ(k),α(k)]
t
为时钟状态向量,a为电网系统的状态转移矩阵,b为电网系统的输入矩阵,u(k-1)为第k-1次时钟的频率和相位调整的控制量,δtu为时钟同步间隔。
[0032]
优选的,(3)中的时差观测方程为:
[0033]
y(k)=hx(k)+v(k)
[0034]
其中:
[0035]
y(k)=[θ
m_s
(k),γ
m_s
(k),α
m_s
(k)]
[0036][0037][0038]
其中,y(k)为k次主从节点间的观测时钟状态向量,h=[1,0,0]为电网系统的观测矩阵;v为电网系统的观测噪声。
[0039]
优选的,(4)中,时钟状态向量x(k)=[θ(k),γ(k),α(k)]
t
进行时间更新和测量更新获得卡尔曼滤波估计为:
[0040][0041]
优选的,s3的具体内容包括:
[0042]
时差反馈控制采用一阶比例积分pi控制器,其中p比例用于消除输入时钟误差,积分项i用于消除系统的稳态误差;一阶比例积分pi控制器输入为卡尔曼滤波得到的时钟状
态向量输出为时钟反馈控制量[δθ(k),δγ(k),δα(k)]
t
;
[0043]
pi控制器的开环传递函数为:
[0044][0045]
其中,k
p
为比例项系数,ki为积分项系数,δtu为环路更新时间。
[0046]
优选的,s4的具体内容包括:
[0047]
由pi控制器输出的时钟反馈控制量作为一阶锁频环fll辅助二阶锁相环pll的输入,经过一阶锁频环和二阶锁相环的环路滤波器后,控制数控振荡器nco产生目标时钟,与主时钟保持同步;
[0048]
一阶锁频环fll环路滤波器的开环传递函数:
[0049]
g(z)
fll
=δtu·
ω
of
[0050]
二阶锁相环pll环路滤波器的开环传递函数:
[0051][0052]
其中,ω
o1
为一阶锁频环fll的自然角频率,ω
op
为二阶锁相环的自然角频率积分项系数,α2为系数。
[0053]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种面向5g智能电网的高精度时钟同步方法,在pi反馈控制的基础上,引入时钟状态滤波,可有效降低噪声对时钟同步精度的影响;根据时钟相位和频率控制量,引入一阶fll辅助二阶pll,保证环路有足够大的频率牵引能力和足够高的时钟输出精度,以与主时钟保持同步,解决了5g智能电网纳秒级时钟同步精度需求,可广泛应用于配电网差动保护、线路巡检、配电自动化、视频监控等智能电网场景。
附图说明
[0054]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0055]
图1附图为本发明提供的面向5g智能电网的高精度时钟同步方法流程图;
[0056]
图2附图为本发明提供的时钟状态滤波的流程图;
[0057]
图3附图为本发明提供的一阶pi控制器数字实现示意图;
[0058]
图4附图为本发明提供的一阶fll辅助二阶pll的环路滤波器数字实现示意图。
具体实施方式
[0059]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0060]
本发明实施例公开了一种面向5g智能电网的高精度时钟同步方法,如图1所示,包
括以下步骤:
[0061]
s1.时差测量:获取主从节点的时钟相位偏差,并根据时钟相位差获得时钟频率偏差和时钟漂移;
[0062]
s2.时钟状态滤波:根据s1中的时钟相位偏差、频率偏差和时钟漂移进行滤波估计;
[0063]
s3.时差反馈控制:基于s2中的滤波估计,通过pi控制器输出从节点时钟的相位和频率的反馈控制量;
[0064]
s4.锁频环fll辅助锁相环pll并输出目标时钟:利用s3中从节点时钟的相位和频率的反馈控制量,通过锁频环fll辅助锁相环pll输出目标时钟,以与主时钟保持同步。
[0065]
为了进一步实施上述技术方案,s1的具体内容包括:
[0066]
基于ieee1588精确时间同步协议,计算得到5g智能电网中主从节点间的时钟相位偏差θ
m_s
,通过时钟相位偏差θ
m_s
计算获得时钟频率偏差和时钟漂移,作为观测值。
[0067]
为了进一步实施上述技术方案,如图2,s2的具体内容包括:采用卡尔曼滤波器估计时钟相位偏差、时钟频率偏差和时钟漂移;
[0068]
卡尔曼滤波器建立的具体内容包括:
[0069]
(1)根据时钟特性,建立时钟的相位、频率和漂移的模型;
[0070]
(2)建立卡尔曼滤波的时差状态方程;
[0071]
(3)建立卡尔曼滤波的时差观测方程;
[0072]
(4)建立卡尔曼滤波器。
[0073]
为了进一步实施上述技术方案,(1)中时钟的相位模型、频率模型和漂移模型分别为:
[0074][0075]
γ(k)=γ(k-1)+α(k-1)
·
δtu+ω
γ
(k-1)
[0076]
α(k)=α(k-1)+ω
α
(k-1)
[0077]
其中,δtu为时钟同步间隔,θ(k)为时钟相位偏差,γ(k)为时钟频率偏差,α(k)为时钟漂移,ω
θ
(k-1)为时钟的相位噪声,ω
γ
(k-1)为时钟的频率噪声,ω
α
(k-1)为时钟的漂移噪声。
[0078]
为了进一步实施上述技术方案,(2)中的时差状态方程为:
[0079]
x(k)=ax(k-1)+bu(k-1)+ω(k-1)
[0080]
其中:
[0081][0082][0083]
其中,x(k)=[θ(k),γ(k),α(k)]
t
为时钟状态向量,a为电网系统的状态转移矩阵,b为电网系统的输入矩阵,u(k-1)为第k-1次时钟的频率和相位调整的控制量,δtu为时钟同步间隔。
[0084]
为了进一步实施上述技术方案,(3)中的时差观测方程为:
[0085]
y(k)=hx(k)+v(k)
[0086]
其中:
[0087]
y(k)=[θ
m_s
(k),γ
m_s
(k),α
m_s
(k)]
[0088][0089][0090]
其中,y(k)为k次主从节点间的时钟相位偏差θ
m_s
、时钟频率偏差γ
m_s
和时钟漂移α
m_s
观测值组成的向量,h=[1,0,0]为电网系统的观测矩阵;v为电网系统的观测噪声。
[0091]
为了进一步实施上述技术方案,(4)中,时钟状态向量x(k)=[θ(k),γ(k),α(k)]
t
进行时间更新和测量更新获得卡尔曼滤波估计为:
[0092][0093]
其中,时间更新具体为:由k-1时刻的状态值,递推k时刻的状态值;测量更新具体为:k时刻的观测,矫正时间更新的值。
[0094]
为了进一步实施上述技术方案,如图3,s3的具体内容包括:
[0095]
时差反馈控制采用一阶比例积分pi控制器,其中p比例用于消除输入时钟误差,积分项i用于消除系统的稳态误差;一阶比例积分pi控制器输入为卡尔曼滤波得到的时钟状态向量输出为时钟反馈控制量[δθ(k),δγ(k),δα(k)]
t
;
[0096]
pi控制器的开环传递函数为:
[0097][0098]
其中,k
p
为比例项系数,ki为积分项系数,δtu为环路更新时间。
[0099]
为了进一步实施上述技术方案,如图4,s4的具体内容包括:
[0100]
由pi控制器输出的时钟反馈控制量作为一阶锁频环fll辅助二阶锁相环pll的输入,经过一阶锁频环和二阶锁相环的环路滤波器后,控制数控振荡器nco产生目标时钟,与主时钟保持同步;
[0101]
一阶锁频环fll环路滤波器的开环传递函数:
[0102]
g(z)
fll
=δtu·
ω
of
[0103]
二阶锁相环pll环路滤波器的开环传递函数:
[0104][0105]
其中,ω
oi
为一阶锁频环fll的自然角频率,ω
op
为二阶锁相环的自然角频率积分项系数,α2为系数。
[0106]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0107]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的
一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1