电力载波通信在智能行车安全诱导系统中的应用方法与流程
1.本发明涉及电力载波通信应用技术领域,具体为电力载波通信在智能行车安全诱导系统中的应用方法。
背景技术:
2.电力载波通讯即plc,是英文power line communication的简称,电力载波是电力系统特有的通信方式,电力载波通讯是指利用现有电力线,通过载波方式将模拟或数字信号进行高速传输的技术,最大特点是不需要重新架设网络,只要有电线,就能进行数据传递,此外还具有比无线通讯传输速率快的特点。
3.在道路安全诱导系统中,通常采用双路布置,即设备供电线路与控制通信线路分开布置,该方式造成了一定的使用不便,尤其在隧道和山区谷地连续弯道路段以及经常出现恶劣天气的路段,220v供电与系统通信线路分别铺设会导致工程量增大以及成本倍增,同时安全诱导系统智能化不足,不能针对性的进行行车安全诱导,降低了使用效率。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了电力载波通信在智能行车安全诱导系统中的应用方法,解决了安全诱导系统布设成本大以及智能化不足效率低的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:电力载波通信在智能行车安全诱导系统中的应用方法,包括以下步骤:
8.s1、布设行车安全诱导系统
9.布设行车安全诱导系统的路段设置为实线车道,多个所述雾灯子机通过龙门架布置在该路段的各车道正上方,龙门架高度满足各类车辆正常通行,所述龙门架位于各雾灯子机一侧各设置有一个显示屏,并连接到220v电力线上,所述龙门架位于各雾灯子机另一侧各设置有一个车牌识别摄像头,并连接到220v电力线上,所述220v电力线还连接有布设在适当位置的区域控制主机和能见度仪,所述区域控制主机连接有linux服务器系统平台,所述linux服务器系统平台能够从收费站数据库获取各车牌对应的车重信息;
10.s2、行车安全诱导系统应用
11.所述能见度仪监测道路的能见度信息,并将能见度信息传递给区域控制主机,同时区域控制主机接收到linux服务器系统平台的信息,根据数据库服务中的数据比对,能够得出此能见度条件下,各不同车重的汽车能够安全通过此路段路形的安全速度区间值,区域控制主机将安全速度区间值数经过功率放大电路放大并通过电力载波plc调制解调模块耦合进220v电力线中进行传播,所述雾灯子机通过plc调制解调模块将220v电力线中的有效通讯信号分解出来并处理放大后传给内部第一mcu处理器,第一mcu处理器控制各红外车辆检测模块工作,利用红外车辆检测模块在监测到迎向驶来的汽车后,将监测到的速度信
息反馈给第一mcu处理器,同时各相应车牌识别摄像头识别到车牌信息,并通过收费站数据库得知该车牌对应车辆的车重信息,并反馈给第一mcu处理器,第一mcu处理器根据不同车重应当对应何种安全速度区间值,进而控制红黄双色led灯的颜色及闪烁频率以显示当前的该车辆的速度状态,其中红灯闪烁代表超出安全速度区间值,闪烁频率越快超出越多,黄灯闪烁代表处于安全速度区间值内,闪烁频率快慢分别对应安全速度区间值高低值,最终司机即能够根据红黄双色led灯的颜色及闪烁频率以及相应显示屏显示的安全速度区间值,在进入危险路段前快速调整汽车的速度至安全速度区间值内,以便安全通过,由于不同车重对应有不同的行驶品质,根据车牌对应的车重信息,本系统可以单独对该车辆进行针对性速度限制,提高安全性和通过率。
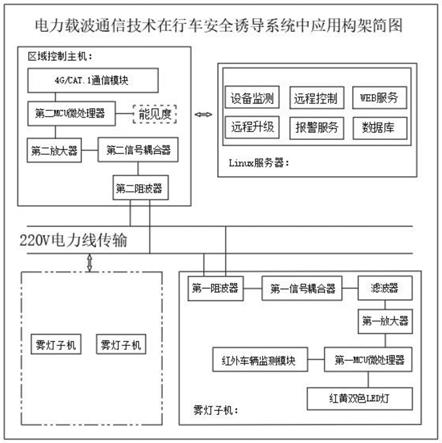
12.优选的,所述雾灯子机包括第一阻波器,所述雾灯子机通过第一阻波器连接在220v电力线上,所述第一阻波器通过导线与第一信号耦合器相连,所述第一信号耦合器通过导线与滤波器相连,所述滤波器通过导线与第一放大器相连,所述第一放大器通过导线与第一mcu微处理器相连。
13.优选的,所述第一mcu微处理器通过导线与红黄双色led灯相连,所述第一mcu微处理器通过导线与红外车辆检测模块相连。
14.优选的,所述区域控制主机包括第二阻波器,所述第二阻波器连接在220v电力线上,所述第二阻波器通过导线与第二信号耦合器相连,所述第二信号耦合器通过导线与第二放大器相连,所述第二放大器通过导线与第二mcu微处理器相连。
15.优选的,所述区域控制主机还包括4g cat.1通信模块,所述4g cat.1通信模块通过导线与第二mcu微处理器相连,所述区域控制主机通过4g cat.1通信模块与linux服务器系统平台进行通信,所述linux服务器系统平台具有设备监测、远程控制、远程升级、报警服务、web服务和数据库服务功能。
16.优选的,所述区域控制主机通过rs-232采集能见度仪能见度信息。
17.(三)有益效果
18.本发明提供了电力载波通信在智能行车安全诱导系统中的应用方法。具备以下有益效果:
19.1、本发明通过将区域控制主机与雾灯子机的控制通信通路搭载在220v电力线上,省略了以往220v供电与系统通信线路分别铺设的工序,使得道路安全诱导系统工程量大大降低以及缩减了布设使用成本,此外电力载波通信还具有比无线通讯传输速率快的特点。
20.2、本发明通过能见度仪监测道路的能见度信息,通过区域控制主机与linux服务器系统平台的数据库服务中的数据比对,得出此能见度条件下,汽车能够安全通过此路段路形的安全速度区间值,进而通过电力载波plc调制解调模块将上述信息传递给雾灯子机,红外车辆检测模块监测到汽车速度信息后,利用红黄双色led灯的颜色及闪烁频率以显示当前的车辆的速度状态,进而司机根据颜色及闪烁频率,在进入危险路段前快速调整汽车的速度至安全速度区间值内,以便安全通过,每辆车针对性的安全诱导使得本安全诱导系统更加智能化、精准化、可靠化。
附图说明
21.图1为本发明的构架简图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例:
24.如图1所示,本发明实施例提供电力载波通信在智能行车安全诱导系统中的应用方法,包括以下步骤:
25.s1、布设行车安全诱导系统
26.布设行车安全诱导系统的路段设置为实线车道,实线车道能够限制车辆随意变道,降低事故发生几率,同时稳定在同一车道行驶的车辆,便于系统提升车辆识别的正确度,多个雾灯子机通过龙门架布置在该路段的各车道正上方,龙门架高度满足各类车辆正常通行,龙门架位于各雾灯子机一侧各设置有一个显示屏,并连接到220v电力线上,龙门架位于各雾灯子机另一侧各设置有一个车牌识别摄像头,并连接到220v电力线上,220v电力线还连接有布设在适当位置的区域控制主机和能见度仪,区域控制主机连接有linux服务器系统平台,linux服务器系统平台能够从收费站数据库获取各车牌对应的车重信息,必要时交通警察单位也可从该行车安全诱导系统获取车辆信息,以便维护行车安全,根据本诱导系统数据库记录的数据,能够为后续道路建设及道路安全设计提供更多有力支持;
27.s2、行车安全诱导系统应用
28.能见度仪监测道路的能见度信息,并将能见度信息传递给区域控制主机,同时区域控制主机接收到linux服务器系统平台的信息,根据数据库服务中的数据比对,能够得出此能见度条件下,各不同车重的汽车能够安全通过此路段路形的安全速度区间值,区域控制主机将安全速度区间值数经过功率放大电路放大并通过电力载波plc调制解调模块耦合进220v电力线中进行传播,雾灯子机通过plc调制解调模块将220v电力线中的有效通讯信号分解出来并处理放大后传给内部第一mcu处理器,第一mcu处理器控制各红外车辆检测模块工作,利用红外车辆检测模块在监测到迎向驶来的汽车后,将监测到的速度信息反馈给第一mcu处理器,同时各相应车牌识别摄像头识别到车牌信息,并通过收费站数据库得知该车牌对应车辆的车重信息,并反馈给第一mcu处理器,第一mcu处理器根据不同车重应当对应何种安全速度区间值,进而控制红黄双色led灯的颜色及闪烁频率以显示当前的该车辆的速度状态,其中红灯闪烁代表超出安全速度区间值,闪烁频率越快超出越多,黄灯闪烁代表处于安全速度区间值内,闪烁频率快慢分别对应安全速度区间值高低值,最终司机即能够根据红黄双色led灯的颜色及闪烁频率以及相应显示屏显示的安全速度区间值,在进入危险路段前快速调整汽车的速度至安全速度区间值内,以便安全通过,由于不同车重对应有不同的行驶品质,根据车牌对应的车重信息,本系统可以单独对该车辆进行针对性速度限制,提高安全性和通过率。
29.雾灯子机包括第一阻波器,雾灯子机通过第一阻波器连接在220v电力线上,阻波器是载波通信及高频保护不可缺少的高频通信元件,它阻止高频电流向其他分支泄漏,起减少高频能量损耗的作用,第一阻波器通过导线与第一信号耦合器相连,第一信号耦合器通过导线与滤波器相连,滤波器是一种选频装置,可以使信号中特定的频率成分通过,而极
大地衰减其他频率成分,利用滤波器的这种选频作用,可以滤除干扰噪声或进行频谱分析,滤波器通过导线与第一放大器相连,放大器是增加信号幅度或功率的装置,第一放大器通过导线与第一mcu微处理器相连,微控制单元(mcu),又称单片微型计算机(single chip microcomputer)或者单片机,是把cpu的频率与规格做适当缩减,并将内存、计数器、usb、ad转换、uart、plc等周边接口,甚至lcd驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制,诸如手机、pc外围、遥控器,至汽车电子、工业上的步进马达、机器手臂的控制等,都可见到mcu的身影。
30.第一mcu微处理器通过导线与红黄双色led灯相连,第一mcu微处理器通过导线与红外车辆检测模块相连。
31.区域控制主机包括第二阻波器,第二阻波器连接在220v电力线上,第二阻波器通过导线与第二信号耦合器相连,第二信号耦合器通过导线与第二放大器相连,第二放大器通过导线与第二mcu微处理器相连。
32.区域控制主机还包括4g cat.1通信模块,4g cat.1通信模块通过导线与第二mcu微处理器相连,区域控制主机通过4g cat.1通信模块与linux服务器系统平台进行通信,linux服务器系统平台具有设备监测、远程控制、远程升级、报警服务、web服务和数据库服务功能。
33.区域控制主机通过rs-232采集能见度仪能见度信息。
34.本实施例中,由于车辆在经过收费站后存在着油料的消耗与补充,因而车重信息不能始终保持一致,因而设置安全速度区间值,以便提高系统的安全冗余度,第二阻波器、第二信号耦合器、第二放大器和第二mcu微处理器组成区域控制主机端的电力载波plc调制解调模块,区域控制主机能接受linux服务器系统平台的设备监测、远程控制、远程升级、报警服务、web服务和数据库服务,区域控制主机在采集到能见度仪能见度信息后,通过功率放大电路放大并通过电力载波plc调制解调模块耦合进220v电力线中进行传播,第一阻波器、第一信号耦合器、滤波器、第一放大器和第一mcu微处理器组成雾灯子机端的plc调制解调模块,将220v电力线中的有效通讯信号分解出来后,即可指令红黄双色led灯工作。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1