基于Arduino的水下全景摄像装置
基于arduino的水下全景摄像装置
技术领域
1.本实用新型涉及水下监控技术领域,具体为一种基于arduino的水下全景摄像装置。
背景技术:
2.水下摄像头目前主要在水下渔业、钓鱼爱好者中运用广泛。为了达到清晰显示水中鱼情的目的,摄像头往往需要具备旋转功能和足够的水下辅助照明,因此在镜头周围往往会安装发出可见光的白光灯和肉眼不可见的红外灯,白光灯发光时白天和晚上通过摄像头采集到的图像都是彩色的,红外灯在黑暗的条件下通过摄像头采集到的图像是黑白的。由于灯是水下摄像头必不可少的组成部分,多数水下摄像头为了达到良好的照明效果安装灯的数量往往会超过30颗,但是目前市面的水下摄像头都没有根据水下的实际情况来调节两种灯的照明组合功能,导致水下摄像头功耗过大,设备工作待机能力下降,降低了设备的有效使用时间。同时,目前的水下摄像头只允许摄像头在水平范围内左右转动,而不能在垂直方向进行上下转动,导致水下摄像范围不够灵活,操作不方便。另外,目前的水下摄像头并不提供旋转控制功能,在水下摄像头的长期自动旋转也带来了功耗的问题,进一步导致设备待机时间的下降。
3.因此,目前的水下摄像头摄像范围不够灵活以及灯光和摄像头无法控制导致功耗大待机时间过短的问题,是亟需解决的一个技术问题。
技术实现要素:
4.为了解决上述技术问题,本实用新型的目的在于提供一种既可以实现水平垂直方向的全景摄像,又能对水下工作时灯光进行切换及数量调节的水下全景摄像装置。
5.为实现上述发明的目的,本技术提供了一种基于arduino的水下全景摄像装置,包括水上控制子系统和水下摄像子系统,所述水上控制子系统和所述水下摄像子系统通过线缆进行连接;其中,所述水上控制子系统包括操作交互模块、主控模块、数据处理模块、显示模块以及供电模块;所述水下摄像子系统包括摄像头(5)、灯光装置(6)以及旋转云台;
6.所述操作交互模块,与所述主控模块电连接,用于获取用户的操作指令发送给所述主控模块;
7.所述灯光装置(6),安装于所述摄像头(5)周围用于水下照明;所述主控模块与所述灯光装置(6)相连接,用于根据用户操作指令控制所述灯光装置(6)的照明工作;
8.所述摄像头(5),安装于所述旋转云台上用于采集水下图像信息;所述数据处理模块与所述摄像头(5)相连接,用于接收所述摄像头(5)采集的图像信息;
9.所述旋转云台,用于安装所述摄像头(5)并能根据主控模块发送的指令带动所述摄像头(5)转动;所述主控模块与所述旋转云台相连接,用于根据用户操作指令控制所述旋转云台的转动工作;
10.所述数据处理模块与所述显示模块连接,用于将接收到的图像信息发送给所述显
示模块进行显示;
11.所述供电模块,分别与所述操作交互模块、所述主控模块、所述数据处理模块、所述显示模块连接用于为各部件供电;
12.所述主控模块采用的是ardunio2560控制器。
13.进一步地,所述主控模块还设有自动控制所述灯光装置(6)以及所述旋转云台进行转动的自动控制模块。
14.进一步地,所述数据处理模块,采用的是树莓派微型电脑。
15.进一步地,所述灯光装置包括白光灯和红外灯,所述白光灯用于发出可见光进行照明,红外灯用于在黑暗条件下发射红外线配合所述摄像头进行红外摄像。
16.进一步地,所述旋转云台包括横轴电机(1)、纵轴电机(2)、底座(3)、安装支架(4)以及转动支架(7),
17.所述横轴电机(1)固定安装于所述水下摄像子系统的底座(3)上,所述横轴电机(1)的电机中心轴竖置于底座(3)上方;
18.所述安装支架(4)呈u形,其底部与所述横轴电机(1)的电机中心轴固定连接,通过所述横轴电机(1)的电机中心轴转动带动所述安装支架(4)绕横轴电机(1)的电机中心轴中心旋转;
19.所述纵轴电机(2)的电机中心轴水平设置,且纵轴电机(2)的电机中心轴一端与所述安装支架(4)一侧安装连接,另一端通过与其同轴固定套接的转动支架(7)与安装支架(4)的另一侧固定连接,所述摄像头(5)安装于所述纵轴电机(2)的机身侧壁上。
20.进一步地,所述灯光装置(6)包括多个安装于所述纵轴电机(2)机身侧壁上并环绕摄像头(5)外周设置的发光单元。
21.进一步地,所述水下摄像子系统还包括套置于整个水下摄像子系统外部的用于防止水下摄像子系统水下工作时进水的密闭外罩。
22.较之前技术而言,本实用新型的优点是:
23.1.采用横轴电机和纵轴电机组成云台进行摄像头旋转控制,由arduino2560控制云台转动来带动摄像头进行旋转摄像,一方面,实现水平和垂直方向的全景摄像,另一方面,旋转控制具备手动或自动两种控制模式,减少了摄像头长期自动旋转带来的功耗,增强设备的水下待机工作时间。
24.2.根据水下光线明暗通过操作交互模块来实现水下工作时白光灯、红外灯切换及及灯的数量调节功能,可有效减少灯光的功耗,进一步增强设备的水下待机工作时间。
附图说明
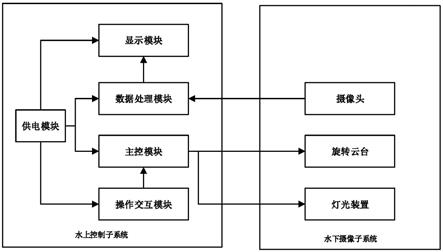
25.图1为本技术的系统结构示意图。
26.图2为本技术的主控模块arduino2560连接示意图。
27.图3是本技术的水下摄像子系统示意图一。
28.图4是本技术的水下摄像子系统示意图二。
29.图5是本技术的水下摄像子系统示意图三。
30.其中,1为横轴电机,2为纵轴电机、3为底座,4为安装支架,5为摄像头,6为灯光装置,7为转动支架。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.如图1为本技术基于arduino的水下全景摄像装置结构示意图,包括水上控制子系统和水下摄像子系统两个部分,所述水上控制子系统和所述水下摄像子系统之间通过线缆进行连接。
33.其中,水下摄像子系统包括摄像头、灯光装置以及旋转云台。所述括摄像头,安装于所述旋转云台上方,用于采集水下图像信息并发送给数据处理模块进行处理。在所述摄像头周围设置有灯光装置,用于进行水下照明,灯光装置包括白光灯和红外灯,所述白光灯用于发出可见光进行照明,红外灯用于在黑暗条件下发射红外线配合所述摄像头进行红外摄像。例如,在摄像头周围设置24盏白光灯和14盏红外灯,白光灯用于白天的照明以及夜晚配合红外灯照明,红外灯负责夜视时照明。所述旋转云台,用于根据主控模块发送的指令进行转动并带动摄像头转动,作为水下部分和水下摄像头封装在圆柱形防水结构内,其由横轴电机和纵轴电机组成,所述横轴电机用于控制所述旋转云台在同一个水平面上向左或向右转动,所述横轴电机用于控制所述旋转云台在垂直方向上向上或向下转动,通过横轴电机和纵轴电机的运动实现云台的旋转。
34.水上控制子系统包括操作交互模块、主控模块、数据处理模块、显示模块以及供电模块,通常这些模块装在水上控制箱内作为水上部分控制使用。
35.所述操作交互模块,与所述主控模块电连接,用于获取用户的操作指令发送给所述主控模块。具体的实施例中,操作交互模块可以由一个摇杆及两个按钮组成,其中,通过摇杆手动控制摄像头旋转,通过一个按钮控制白光灯和红光灯切换功能,通过另一个按钮作为深水控制按钮,即控制白光灯和红光灯同时亮起。
36.所述主控模块,分别与所述灯光装置以及所述旋转云台相连接,用于根据用户操作指令控制所述灯光装置,用于根据用户操作指令控制所述旋转云台进行转动;所述主控模块采用的是ardunio2560控制器。
37.在一优选的实施例中,本技术的基于arduino的水下全景摄像装置的所述主控模块,还设有自动控制所述灯光装置以及所述旋转云台进行转动的自动控制模块,用于根据预设的程序自动控制所述灯光装置以及所述旋转云台进行转动。具体地,可在摇杆上集成一个按钮实现摄像头手动控制模式及自动控制模式的切换,当切换到手动模式时arduino2560主控芯片根据输入的摇杆信号手动控制横轴、纵轴电机带动云台转动,当切换到自动模式时,由arduino2560主控芯片根据设定好的程序对横轴、纵轴电机发出信号,通过由横纵轴电机组成的云台带动摄像头进行转动。
38.如图2所述,是本技术主控模块ardunio2560与操作交互模块以及所述旋转云台的连接示意图,其中,操作交互模块作为输入端进行信号输入,其中摇杆x轴连接至arduino2560的a4端口,摇杆y轴连接至arduino2560的a5端口,摇杆的自动手动切换端连接至arduino2560的a3端口,摇杆的电源vcc端和地gnd端分别接到arduino2560的vcc端和gnd端。同时,白光灯和红外灯切换按钮led连接至arduino2560的a2端口,深水控制按钮连接至
arduino2560的a1端口,两个按钮按钮的gnd端接arduino2560的gnd端。旋转云台作为arduino2560的输出,arduino2560的45端口接到旋转云台横轴电机的信号口,arduino2560的44端口接到旋转云台纵轴电机的信号口,arduino2560的vcc端和gnd端分别接到横轴电机和纵轴电机的vcc端和gnd端。
39.所述数据处理模块,分别与所述显示模块以及所述摄像头相连接,用于接收所述摄像头采集的图像信息,并发送给所述显示模块。优选地,可采用树莓派4b微型电脑作为数据处理模块,既可以节省空间,还可以有效降低设备的总体功耗。
40.所述显示模块,用于显示摄像头采集的图像信息,通常显示模块和树莓派4b集成在水上控制子系统内,显示屏通过hdmi口连接树莓派4b,将树莓派4b接收到的水下摄像头画面清晰的显示出来。
41.所述供电模块,用于为所述基于arduino的水下全景摄像装置的各个模块提供稳定的供电。具体的实施例中,所述电模块由锂电池提供,锂电池采用3串型号为4.8ah锂电池,输出电压12v,容量4800mah,待机时间9小时。
42.如图3
‑
5所示,是本技术的水下摄像子系统示意图,其中,所述旋转云台包括横轴电机(1)、纵轴电机(2)、底座(3)、安装支架(4)以及转动支架(7),所述横轴电机(1)固定安装于所述水下摄像子系统的底座(3)上,所述横轴电机(1)的电机中心轴竖置于底座(3)上方;所述安装支架(4)呈u形,其底部与所述横轴电机(1)的电机中心轴固定连接,通过所述横轴电机(1)的电机中心轴转动带动所述安装支架(4)绕横轴电机(1)的电机中心轴中心旋转。所述纵轴电机(2)的电机中心轴水平设置,且纵轴电机(2)的电机中心轴一端与所述安装支架(4)一侧安装连接,另一端通过与其同轴固定套接的转动支架(7)与安装支架(4)的另一侧固定连接,所述摄像头(5)安装于所述纵轴电机(2)的机身侧壁上。当所述纵轴电机(2)接收到驱动时候,使纵轴电机(2)机身相对安装支架(4)绕纵轴电机(2)的电机中心轴中心转动,从而带动安装于所述纵轴电机(2)机身侧壁上的所述摄像头(5)在转动。
43.在一优选的实施例中,所述灯光装置(6)包括多个安装于所述纵轴电机(2)机身侧壁上并环绕摄像头(5)外周设置的发光单元。
44.在另一优选的实施例中,所述水下摄像子系统还包括套置于整个水下摄像子系统外部的用于防止水下摄像子系统水下工作时进水的密闭外罩。
45.本技术的基于arduino的水下全景摄像装置工作原理如下:
46.操作交互模块由一个摇杆及两个按钮组成,分别与所述arduino2560控制器的信号输入端连接,通过对摇杆按钮的操作对自动模式及手动模式进行切换。在自动模式下由arduino2560根据设定好的程序发出指令,控制云台的横轴电机和纵轴电机转动,横轴电机每运动一周,纵轴电机向下调整小角度,以此循环达到全景摄像的目的。在手动模式下,arduino2560循环读取摇杆输入的信号,当读取到摇杆x轴数据大于600时,横轴电机向右旋转一度;当读取到摇杆x轴数据小于400时,横轴电机向左旋转一度;当读取到摇杆y轴数据大于600时,纵轴电机向上旋转一度;当读取到摇杆y轴数据小于400时,纵轴电机向下旋转一度。通过以此循环的读取方式实现摇杆对横纵轴电机的控制。水下的摄像头模组固定于由横纵轴电机组成的旋转云台上,由云台运动带动摄像头进行拍摄。在获取图像信号后将数据由杜邦线传输至树莓派4b,经由树莓派4b最终将图像清晰地显示于显示屏上,供用户进行水下观察。同时,还可通过操作交互模块的切换按钮,根据环境情况进行白光灯和红外
灯的切换,同时水下摄像头在夜间或在深水区工作时,白光灯即使全部点亮也可能会看不清楚,还可通过深水控制按钮实现白光灯和红光灯同时亮起,让水下摄像头获取清晰的图像。
47.因此,本技术基于arduino2560及树莓派4b设计了一款全景水下摄像头实现:
48.1.能根据水下鱼情进行手动和自动控制旋转选择,旋转云台由横轴电机和纵轴电机实现旋转,增加了垂直方向的摄影范围,实现了360度视野,减少了摄像头长期自动旋转带来的功耗;
49.2.鱼情监控人员和钓鱼爱好者根据水下情况通过操作交互模块的按钮对灯光进行灵活的切换,根据水下光线明暗通过操作交互模块来实现水下工作时白光灯、红外灯切换及及灯的数量调节的功能,可以减少不必要的设备损耗延长水下摄像头工作时间;
50.3.设计白光灯和红外灯来进行照明辅助,红外灯在夜间进行照明,可清楚得到影像同时不会打扰到鱼类正常生活。在深水区使用时,红外灯的优势不是那么突出,便可白光灯和红外灯一起照明,扩大被照亮的面积,增加水中能见度。
51.上述具体实施方式只是对本实用新型的技术方案进行详细解释,本实用新型并不只仅仅局限于上述实施例,凡是依据本实用新型原理的任何改进或替换,均应在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1