移动反无人机防御装置的制作方法
1.本实用新型涉及反无人机技术领域,具体地,涉及一种移动反无人机防御装置,尤其是一种具备探测、识别和制止无人机的防御装置。
背景技术:
2.无人机作为一项精尖科技,为人们带来了很多便利,并已运用在军用和民用的各个方面,然而无人机的负面效应也逐渐浮出水面,由于无人机“黑飞”造成的安全隐患和事故也屡禁不止,无人机的泛滥,导致了很多事故,干扰军机训练;干扰民航机场正常运行;干扰大型赛事活动和危及民众安全,用无人机从事不正当活动,例如运输非法物品,或者间谍活动也时有发生。在战争中,无人机可派往最危险的地方执行任务,无人机可实现超高音速、携带核弹实施全球性攻击。已引起广泛的关注,随之无人机的防御应运而生。
3.在国外,英国三家在各自行业处于领军地位的企业联合开发一种强大、高效且高度集成的反无人飞行器防御系统(auds),但这些无人机的防御技术垄断在国外几个公司,且设备都是安装在固定位置固定。在国内虽有移动装置,但是便携式的,功能有限,无法实现对中、高速、低、高空无人机的防御,如长沙北斗产业技术安全研究院的便携式无人机诱骗管控电子枪等。对此,我们公司利用雷达和光电监测设备的技术优势,在雷达和光电监测设备的基础上,配上合适的运载车辆和电源设备,设计制造出适用于一种探测、跟踪、识别和干扰制止无人机的移动防御装置。
4.公开号为cn212205829u的专利文献公开了一种便携式的反无人机防御系统,针对现有反无人机防御系统的功能单一,误报虚报率较高,对入侵目标的防御能力较弱的问题,现提出如下方案,其包括携带箱,所述携带箱的顶部转动安装有箱盖,携带箱的两侧内壁上均开设有移动槽,两个移动槽内均滑动安装有移动座,两个移动座相互靠近的一端固定安装有同一个移动板,移动板的顶部转动安装有转动板,转动板的顶部固定安装有雷达探测单元、频谱探测单元、红外探测单元、光电跟踪单元和干扰器。但是该专利文献仍然存在功能有限,无法实现对中、高速、低、高空无人机的防御的缺陷。
技术实现要素:
5.针对现有技术中的缺陷,本实用新型的目的是提供一种移动反无人机防御装置。
6.根据本实用新型提供的一种移动反无人机防御装置,包括移动运载工具,所述移动运载工具上设置有目标探测组件、控制组件及防卫组件;所述目标探测组件和所述控制组件连接设置,所述控制组件和所述防卫组件连接设置;
7.所述目标探测组件包括雷达和光电监测组件,所述光电监测组件和所述雷达均设置在所述移动运载工具上;
8.所述光电监测组件与所述控制组件连接设置,所述雷达与所述控制组件连接设置。
9.优选的,所述防卫组件包括定向射频抑制与干扰器和激光炮;所述定向射频抑制
与干扰器和所述激光炮均设置在所述移动运载工具上;
10.所述定向射频抑制与干扰器和所述激光炮均连接设置在所述控制组件上。
11.优选的,所述雷达为圆盘状固态雷达。
12.优选的,所述圆盘状固态雷达的型号为drs4d-nxt。
13.优选的,所述光电监测组件包括可见光光学探测器。
14.优选的,所述可见光学探测器为相机。
15.优选的,所述相机的型号为ipc-hf8239e。
16.优选的,还包括不可见光光学探测器。
17.优选的,不可见光光学探测器为红外探测器。
18.优选的,所述红外探测器为guidir ir118非制冷红外热像机芯组件。
19.与现有技术相比,本实用新型具有如下的有益效果:
20.1、本实用新型充分发挥了硬件的优势,具有结构简单、机动性强、成本低、效率高、能够快速有效地满足在天空复杂环境条件下对目标的警戒、搜索、跟踪、识别和监视等任务需求;
21.2、本实用新型的机动性强,适用于对无人机的监察,特别适用于对从事不正当活动无人机探测、跟踪识别和干扰制止;
22.3、本实用新型强化了对地杂波条件下低、高空目标检测能力,全自动目标探测跟踪识别能力,以及干扰制止无人机的能力。
附图说明
23.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
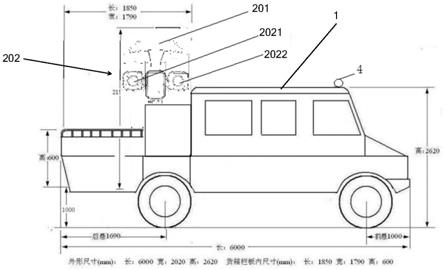
24.图1为本实用新型的移动反无人机防御装置的整体结构示意图;
25.图2为本实用新型的移动反无人机防御装置为突出显示目标探测组件的结构示意图;
26.图3为本实用新型的移动反无人机防御装置的俯视图;
27.图4为本实用新型的移动反无人机防御装置的原理图。
28.图中示出:
29.移动运载工具1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
不可见光光学探测器2022
30.目标探测组件2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制组件3
31.雷达201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
防卫组件4
32.光电监测组件202
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支架5
33.可见光光学探测器2021
具体实施方式
34.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
35.如图1~4所示,本发明提供的一种移动反无人机防御装置,包括移动运载工具1,移动运载工具1上设置有目标探测组件2、控制组件3及防卫组件4,目标探测组件 2和控制组件连接设置,控制组件3和防卫组件4连接设置,目标探测组件2包括雷达201和光电监测组件202,光电监测组件202和雷达201均设置在移动运载工具上,光电监测组件202与控制组件3连接设置,雷达201与控制组件3连接设置。
36.雷达201为圆盘状固态雷达,圆盘状固态雷达的型号为drs4d-nxt。光电监测组件202包括可见光光学探测器2021,可见光学探测器2021为相机,相机的型号为 ipc-hf8239e,还包括不可见光光学探测器2022,不可见光光学探测器2022为红外探测器,红外探测器为guidir ir118非制冷红外热像机芯组件。
37.防卫组件4包括定向射频抑制与干扰器和激光炮,定向射频抑制与干扰器和激光炮均设置在移动运载工具1上,定向射频抑制与干扰器和激光炮均连接设置在控制组件3上。
38.实施例:
39.一种移动反无人机防御装置,包括移动运载工具,移动运载工具上设置有目标探测单元、综合处理单元及防卫单元,目标探测单元与综合处理单元连接,目标探测单元包括雷达、光电监测设备、监测信息预处理设备,用于探测高、低空目标;综合处理单元包括信息处理计算机和显示控制台,信息处理计算机与显示控制台连接,综合处理单元通过i/o控制信号接口与防卫单元连接,综合处理单元用来跟踪、分类探测目标,启动所述防卫单元。
40.雷达设备选用圆盘状固态雷达,型号为drs4d-nxt,低成本、高性能的x波段双通道tr组件,100~200w的峰值功率,50~60db的脉冲压缩主副比,6个子波形实现频率分级探测,采用双线偏振技术,通过相参处理,形成圆极化,抑制雨杂波,采用脉冲压缩技术,提高雷达距离分辨力和探测能力,同时兼容连续波与脉冲压缩双模技术,根据周围情况进行自适应优化选择。雷达通过支架5设置在移动运载工具上。
41.光电监测设备包括可见光学和不可见光学光电检测设备,光电检测设备结合雷达引导视频跟踪系统跟踪无人机。光电监测设备包括可见光学和不可见光学光电检测设备,包含在可见光学和不可见光学舱室,分别安装在雷达二侧。可见光学探测器为视频日夜两用透雾镜头和可见光镜头控制板,选用ipc-hf8239e大华的夜鹰相机,具有星光级低照度和超宽动态范围,支持1080p全高清,低照度效果最低可达 0.0001lux,宽动态高达140db,该机在透雾功能上支持自动与手动设置,手动设置支持3级强度的透雾与16级不同程度大气模式选择,可见光镜头控制板主要功能:变倍、对焦、
×
2倍的镜头的控制;输出镜头当前的倍率(焦距值),给激光器随动;输出镜头当前的聚焦电压值;加热器、风扇、雨刷的控制;光学透雾的选择;光敏电阻,感应外部光亮。不可见光学探测器为红外探测器;选用guidir ir118非制冷红外热像机芯组件,测量范围:300℃,测量精度:2%,分辨率:0.08,可以在完全黑暗没有光线的情况下,依靠物体自身辐射的红外线能量,形成清晰的热图像。即使是大雾等恶劣天气,也能清晰的观察很远的目标。
42.监测信息预处理设备包含雷达信息处理模块及光电信息处理模块、红外仪信息处理模块,监测信息预处理设备用于完成多路信息采集、处理。监测信息预处理设备,与雷达设备连接,用于接收雷达信号,用于进行信号处理、数据预处理、形成目标跟踪航迹信息,利用雷达设备完成天空目标探测,获得目标的距离、方位数据。
43.信息处理计算机包括处理器、固态存储器、接口转换模块、传输总线、防卫单元控制器及电源,信息处理计算机与信号预处理设备相连,用于接收信号预处理设备发来的目标指示信息,引导光电设备跟踪目标并获取目标图像,并不断跟随雷达设备的跟踪目标,实现雷达引导视频跟踪、信息的融合显示、人机界面的动态调整、启动防卫单元操作。
44.防卫单元包括定向射频抑制与干扰器和激光炮,射频抑制与干扰器通过智能射频压制系统阻断无人机通讯并关闭无人机,迫使其降落,实现捕获,激光炮必要时用于将无人机从空中打下来。防卫单元包括定向射频抑制与干扰器和激光炮,射频抑制与干扰器通过智能射频压制系统阻断无人机通讯并关闭无人机,激光炮必要时用于将无人机从空中打下来。目前大多数远程无人机均采用gps卫星导航系统与惯性导航系统相结合的方式,向目标无人机发射一定功率的定向射频,无人机gps信号受到干扰后无法获得精确的自身坐标数据,就会导致无人机在一定程度上失控,以至于作业失败。这种射电波能有效阻断无人机通讯,并能够在半空中关闭无人机,实现捕获。激光炮高能激光移动发射器,发射器在全功率情况下发出的激光,只需要两秒钟的时间在无人机外壳上烧个洞。对于正在飞行的无人机给一个致命的打击。激光炮还有个优势,使用方便。
45.移动运载工具选用货箱设计江淮电动皮卡,超大容积货箱设计,充分满足专利需求,货箱容积可达1008l,电动皮卡电源功率:6400w,其中,可供电脑、显示器300 w,激光设备1000w,雷达4000w,光电监测设备100w。电源还配两套高能蓄电池(48v100ah
×
3)配一个300a以上,dc/dc变换器,作为江淮电动皮卡补充电源。
46.本装置增强了对无人机探测、跟踪识别能力,机动性强,适用于对无人机的监察,特别适用于对从事不正当活动无人机探测、跟踪识别和干扰制止。本装置提供一种探测、跟踪、识别和干扰制止无人机的移动防御装置,强化了对地杂波条件下低、高空目标检测能力,全自动目标探测跟踪识别能力,以及干扰制止无人机的能力。
47.本实用新型采用移动方式,综合处理单元获取雷达及光电、红外仪探测到目标的信息结合智能图像处理技术,进行跟踪、分类、方位的识别,通过计算机生成目标数字化信息显示在显示屏上,为操作人员提供目标所在地点的地理数据、目标类形等重要数据,从而通过防卫单元对无人机进行干扰、压制,直至迫使其降落,实现捕获。本实用新型充分发挥了现有设备的优势,具有结构简单、机动性强、成本低、效果好、效率高、能够快速有效地满足在天空复杂环境条件下对目标的警戒、搜索、跟踪、识别和监视等任务需求。
48.本实用新型利用雷达完成对天空目标探测,获得目标的距离、方位数据,雷达引导光电设备瞄准跟踪装置应用特殊数学模型,解算出光电设备光学视线瞄准线指向,引导光电设备指向目标,光电设备获取目标的图像信息,并不断跟随雷达跟踪目标。
49.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
50.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1