一种用于无人驾驶小车的路标识别摄像头
1.本实用新型涉及无人驾驶车领域,尤其涉及一种用于无人驾驶小车的路标识别摄像头。
背景技术:
2.自动汽车,也称为机器人汽车,自动驾驶汽车,或无人驾驶汽车,是一种能够感知其环境并在很少或完全没有人工输入的情况下行驶的汽车。自动驾驶汽车结合了多种传感器来感知周围环境,例如雷达,激光雷达,声纳,全球定位系统,里程计和惯性测量单元,其中,对于周围环境感知的传感器主要利用摄像机捕捉周围环境和路标信息,再利用视觉算法编制行车路线,摄像头的捕捉清晰度事关无人驾驶小车的安全。
3.现有的无人驾驶小车的摄像头分布在小车的四周用于实时捕捉周围环境画面和路标信息,但在雨天行车时,雨天空气中湿度大,摄像头的镜片或者用防护摄像头的透明片在接触到雨水时,雨水会产生干扰,影响正常的画面拍摄捕捉,影响雨天行车安全,且摄像头内置在无人驾驶车内部,在炎热的夏季行车时,温度过高影响摄像头工作效率。
4.因此,有必要提供一种新的用于无人驾驶小车的路标识别摄像头解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本实用新型提供一种带有抗雨水干扰能力强,识别精准,散热降温性的用于无人驾驶小车的路标识别摄像头。
6.本实用新型提供的用于无人驾驶小车的路标识别摄像头包括:机箱、锁紧组件和清洁机构,所述机箱内滑动连接有安装板,所述安装板一侧安装有用于密封机箱的门板,机箱的一侧开设有通槽,机箱位于通槽的一侧固定安装有透明防护罩,所述锁紧组件固定安装于安装板的上表面,且锁紧组件安装有摄像头,用于摆动清扫雨水的所述清洁机构安装于透明防护罩上,且清洁机构包括外雨刷和内雨刷和驱动组件,所述外雨刷设置在透明防护罩的外侧壁上,所述内雨刷设置在透明防护罩的内侧壁上,用于驱动外雨刷和内雨刷的驱动组件安装于透明防护罩上。
7.优选的,所述机箱背离门板的侧壁上安装有散热风扇,所述门板的侧壁上开设有通孔,通孔内嵌装有橡胶套,机箱背离透明防护罩的一侧固定安装有连接板,所述连接板上开设有连接槽。
8.优选的,所述锁紧组件包括安装座、安装套筒、螺母套和螺纹杆,所述安装座固定安装于连接板上,且安装座的上表面固定连接有安装套筒,所述安装套筒的侧壁上安装三个圆周分布的螺母套,所述螺母套上螺纹连接有螺纹杆,所述螺纹杆的一端伸入安装套筒内并粘贴有橡胶片。
9.优选的,所述锁紧组件还包括冷却水管,所述安装套筒贯穿开设有多个通孔,所述冷却水管依次穿过通孔并通过导管与外置的水冷却系统连通。
10.优选的,所述驱动组件包括第一连接杆、第一传动轴、第一齿轮、第二连接杆、第二传动轴、第二齿轮、齿条板、弹簧和微型电机,两个所述第一连接杆一端分别与外雨刷的两端固定连接,且两个第一连接杆的另一端均固定连接有第一传动轴、所述第一传动轴转动安装于透明防护罩的端面上,且第一传功轴上套设有第一齿轮,两个所述第二连接杆一端分别与内雨刷的两端固定连接,且两个第二连接杆的另一端固定连接有第二传动轴,所述第二传动轴转动安装于透明防护罩的端面上并位于第一传动轴的一侧,第二齿轮套设在第二传动轴上并与第一齿轮啮合,所述齿条板滑动安装于透明防护罩的端面上并与第二齿轮啮合,所述弹簧一端与透明防护罩的端面上固定连接,弹簧另一端与齿条板的上表面固定连接,所述微型电机固定安装于透明防护罩的端面上,且微型电机的输出端伸入透明防护罩内且固定连接有凸轮,所述凸轮与齿条板底端开设的卡槽配合工作。
11.优选的,所述锁紧组件设有三组,且三组锁紧组件上分别安装有不同焦距的摄像头,所述摄像头设置于安装套筒内并利用螺纹杆锁紧。
12.与相关技术相比较,本实用新型提供的用于无人驾驶小车的路标识别摄像头具有如下有益效果:
13.1、本实用新型提供一种用于无人驾驶小车的路标识别摄像头,通过在透明防护罩的内外壁设置外雨刷和内雨刷在雨天行车时利用驱动组件驱动外雨刷和内雨刷同时带动刮除雨水对透明防护罩的干扰,提高摄像头在雨天对周围环境和路标标识的识别能力和清晰度;
14.2、设置锁紧组件,锁紧组件利用安装套筒和螺纹杆的配合便于对摄像头进行安装和拆卸,同时通过在锁紧组件上设置了冷却水管与外置的水冷却系统连通对摄像头进行水冷降温,同时利用机箱侧壁的散热风扇进一步提高摄像头的散热能力,使摄像头在高温的环境下能保护良好的工作效率。
附图说明
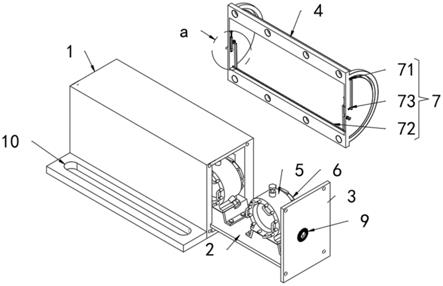
15.图1为本实用新型提供的用于无人驾驶小车的路标识别摄像头的一种较佳实施例的结构示意图;
16.图2为为本实用新型提供的用于无人驾驶小车的路标识别摄像头的另一个视角的结构示意图;
17.图3为图1所示的a的局部放大图;
18.图4为图2所示的b的局部放大图;
19.图5为图4所示的安装套筒内部结构示意图。
20.图中标号:1、机箱;2、安装板;3、门板;4、透明防护罩;5、锁紧组件;51、安装座;52、安装套筒;53、螺母套;54、螺纹杆;541、橡胶片;55、冷却水管;6、摄像头;7、清洁机构;71、外雨刷;72、内雨刷;73、驱动组件;731、第一连接杆;732、第一传动轴;733、第一齿轮;734、第二连接杆;735、第二传动轴;736、第二齿轮;737、齿条板;738、弹簧;739、微型电机;7391、凸轮;8、散热风扇;9、橡胶套;10、连接板。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施
例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.以下结合具体实施例对本实用新型的具体实现进行详细描述。
23.请参阅图1至图5,本实用新型实施例提供的一种用于无人驾驶小车的路标识别摄像头,用于无人驾驶小车的路标识别摄像头包括:机箱1、锁紧组件5和清洁机构7。
24.机箱1内滑动连接有安装板2,安装板2一侧安装有用于密封机箱1的门板3,机箱1的一侧开设有通槽,机箱1位于通槽的一侧固定安装有透明防护罩4,锁紧组件5固定安装于安装板2的上表面,且锁紧组件5安装有摄像头6,用于摆动清扫雨水的清洁机构7安装于透明防护罩4上,且清洁机构7包括外雨刷71和内雨刷72和驱动组件73,外雨刷71设置在透明防护罩4的外侧壁上,内雨刷72设置在透明防护罩4的内侧壁上,用于驱动外雨刷71和内雨刷72的驱动组件73安装于透明防护罩4上。
25.需要说明的是:摄像头6安装在锁紧组件5上,锁紧组件5通过安装板2安装在机箱1内并利用门板3密封,透明防护罩4安装在机箱1用于拍摄防护,将机箱1安装在无人驾驶车上,这样摄像头6在雨天行车时,通过驱动组件73控制外雨刷71和内雨刷72同时工作,对击打在透明防护罩4的雨水进行刮除,同时对透明防护罩4因内外温差产生水雾进行扫除,提高摄像头6在雨天的路标识别和环境感知能力。便于无人驾驶小车在雨天行车。
26.在本实用新型的实施例中,请参阅图1和图2,机箱1背离门板3的侧壁上安装有散热风扇8,门板3的侧壁上开设有通孔,通孔内嵌装有橡胶套9,机箱1背离透明防护罩4的一侧固定安装有连接板10,连接板10上开设有连接槽。
27.需要说明的是:通过设置散热风扇8在高温炎热天气下启动散热风扇8对记机箱1内部进行散热,在门板3上开设通孔并安装橡胶套9,便于接入机箱1内部的线缆和导管通过并利用橡胶套9密封防尘,通过开设有连接槽的连接板10可以将机箱1安装在无人驾驶小车上。
28.请参阅图3和图4,驱动组件73包括第一连接杆731、第一传动轴732、第一齿轮733、第二连接杆734、第二传动轴735、第二齿轮736、齿条板737、弹簧738和微型电机739,两个第一连接杆731一端分别与外雨刷71的两端固定连接,且两个第一连接杆731的另一端均固定连接有第一传动轴732、第一传动轴732转动安装于透明防护罩4的端面上,且第一传动轴732上套设有第一齿轮733,两个第二连接杆734一端分别与内雨刷72的两端固定连接,且两个第二连接杆734的另一端固定连接有第二传动轴735,第二传动轴735转动安装于透明防护罩4的端面上并位于第一传动轴732的一侧,第二齿轮736套设在第二传动轴735上并与第一齿轮733啮合,齿条板737滑动安装于透明防护罩4的端面上并与第二齿轮736啮合,弹簧738一端与透明防护罩4的端面上固定连接,弹簧738另一端与齿条板737的上表面固定连接,微型电机739固定安装于透明防护罩4的端面上,且微型电机739的输出端伸入透明防护罩4内且固定连接有凸轮7391,凸轮7391与齿条板737底端开设的卡槽配合工作。
29.需要说明的是:驱动组件73使用时,通过控制微型电机739转动,微型电机739带动凸轮7391转动,凸轮7391转动时,齿条板737在凸轮7391和弹簧738的作用下进行竖直方向上往返运动,齿条板737与第二齿轮736啮合带动第二齿轮736来回转动,第二齿轮736通过第二传动轴735和第二连接杆734带动内雨刷72进行来回转动,将透明防护罩4内部的水雾进行刮除,同时第二齿轮736与第一齿轮733啮合带动第一齿轮733来回转动,第一齿轮733
通过第一传动轴732和第一连接杆731带动外雨刷71来回摆动,对透明防护罩4外部的雨水进行刮除。这样设置便于同时对透明防护罩4内外壁清洁,减少雨天雨水的干扰。
30.在本实用新型的实施例中,请参阅图1和图4,锁紧组件5固定安装于安装板2的上表面,且锁紧组件5安装有摄像头6,锁紧组件5包括安装座51、安装套筒52、螺母套53和螺纹杆54,安装座51固定安装于安装板2上,且安装座51的上表面固定连接有安装套筒52,安装套筒52的侧壁上安装三个圆周分布的螺母套53,螺母套53上螺纹连接有螺纹杆54,螺纹杆54的一端伸入安装套筒52内并粘贴有橡胶片541。
31.需要说明的是:锁紧组件5使用时,通过将摄像头6放置在安装套筒52的中空通孔内,转动螺纹杆54,三个螺纹杆54沿着螺母套53的方向靠近摄像头6完成夹紧,并在螺纹杆54上设置橡胶片541用于保护摄像头6,减少磕碰。这样便于快速安装以及后期对摄像头6拆卸维护。
32.其中,锁紧组件5还包括冷却水管55,安装套筒52贯穿开设有多个通孔,冷却水管55依次穿过通孔并通过导管与外置的水冷却系统连通,这里外置的水冷却系统为无人驾驶小车内置的水冷循环,在高温环境下,利用冷却水管55对安装套筒52进行水冷降温,进一步提高散热,便于摄像头6在炎热的环境下工作。
33.其中,锁紧组件5设有三组,且三组锁紧组件5上分别安装有不同焦距的摄像头6,摄像头6设置于安装套筒52内并利用螺纹杆54锁紧,这样设置三收组不同焦距的摄像头6组成三目摄像头可以提高无人驾驶小车的识别范围和精度,便于无人驾驶小车的行车。
34.本实用新型提供的用于无人驾驶小车的路标识别摄像头的工作原理如下:雨天行车时,启动微型电机739,微型电机739带动凸轮7391转动,凸轮7391转动时,齿条板737在凸轮7391和弹簧738的作用下进行竖直方向上往返运动,齿条板737与第二齿轮736啮合带动第二齿轮736来回转动,第二齿轮736通过第二传动轴735和第二连接杆734带动内雨刷72进行来回转动,将透明防护罩4内部的水雾进行刮除,同时第二齿轮736与第一齿轮733啮合带动第一齿轮733来回转动,第一齿轮733通过第一传动轴732和第一连接杆731带动外雨刷71来回摆动,对透明防护罩4外部的雨水进行刮除。这样设置便于同时对透明防护罩4内外壁清洁,减少雨天雨水的干扰,便于对路标进行识别;锁紧组件5利用螺纹杆54将摄像头6可拆卸安装于安装套筒52内,这样便于对摄像头6安装拆卸维护。同时,在高温炎热环境下,启动散热风扇8以及冷却水管55接通外置的水冷却系统对摄像头6进行降温,保证其在高温条件下的工作效率。
35.本实用新型中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
36.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1