一种海量图片采集工作方法与流程
1.本发明涉及一种图片采集技术领域,特别是涉及一种海量图片采集工作方法。
背景技术:
2.口腔内窥镜是口腔检查时常用的器械,能够抓拍口腔中的内部环境,进行清楚的判断,对用户的病情做好标记,以提高病情的治愈和治疗效率。专利申请号2019203476677,名称为“一种口腔全景图像拍摄装置”,公开了包括拍摄手柄和拍摄头组件,拍摄头组件可旋转设置在拍摄手柄的一端,拍摄头组件包括正交布置的拍摄头,拍摄头为凹槽形,拍摄头的底端内设置有摄像头模组,拍摄头的槽口端均朝向直角夹角的内侧设置;上述技术方案中提供的口腔全景图像拍摄装置,结构简单,使用方便,其利用牙齿唇面和咬合面之间呈正交关系,采用正交布置的摄像头,可同时对牙齿唇面和咬合面进行拍摄,并且利用拍摄头限定了拍摄时的像距,保证了拍摄角度和距离不变,减小了摄像头移动的自由度,大大提高了图像采集质量。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种海量图片采集工作方法。
4.为了实现本发明的上述目的,本发明提供了一种海量图片采集工作方法,包括以下步骤:
5.s1,读取用户身份信息;
6.s2,对用户进行图像拍摄;
7.s3,将拍摄的图像数据上传至云端管理控制平台与用户相绑定进行存储;
8.s4,将用户的图像下载到电脑终端上进行查看。
9.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
10.s11,将感应卡片靠近输入显示装置,感应卡片内存储有用户的身份信息包括姓名、性别、年龄、身份证号码、住址、住院idd号之一或者任意组合,无线感应单元感应读取用户身份信息;
11.s12,将步骤s11中获取到的用户身份信息存储在控制器内,待图像数据采集完毕后,将用户身份信息与用户身份信息所对应拍摄的图像数据上传至云端管理控制平台。
12.在本发明的一种优选实施方式中,在步骤s2中包括以下步骤:
13.s21,用户坐靠在座椅上,通过上升按键或/和下降按键调整横向固定板二的高度,使其咬块高度与用户口部高度相当:
14.控制器检测到用户按住上升按键时,控制器向其丝杆电机发送正转控制信号,丝杆电机正转,使其移动螺母带动u型移动框架向上移动;
15.控制器检测到用户按住下降按键时,控制器向其丝杆电机发送反转控制信号,丝杆电机反转,使其移动螺母带动u型移动框架向下移动;
16.s22,用户通过从容纳箱从取出口套和额套,将其口套套在咬块上,额套套在弧形板上;
17.s23,控制器判断是否接收到咬合传感器检测到咬合信号、贴靠传感器检测到贴靠信号、检测按键输出开始检测信号:
18.若控制器持续接收到咬合传感器检测到咬合信号且贴靠传感器检测到贴靠信号,以及准备完成后接收到检测按键输出的开始检测信号,则控制器向其丝杆电机一发送正转控制信号,丝杆电机一正转,使其移动螺母一带动竖向移动板一向竖向移动板二靠近,以及控制器向其丝杆电机二发送正转控制信号,丝杆电机二正转,使其移动螺母二带动竖向移动板二向竖向移动板一靠近;当其竖向移动板一与竖向移动板二相距dcm时,cm表示长度单位厘米,竖向移动板一与竖向移动板二停止移动;
19.否则,返回步骤s23;
20.s24,控制器向图像生成装置发送生成用户齿部图像数据控制命令,以及向射线发射装置发送射线发射控制命令,射线发射装置发出x射线,x射线穿过用户脸部,由图像生成装置生成用户初始位置的图像数据,记作i0;
21.s25,控制器向其旋转电机发送正转控制信号,旋转电机正转,使其旋转输出驱动端带动u型旋转框架顺时针旋转角度,控制器向图像生成装置发送生成用户齿部图像数据控制命令,以及向射线发射装置发送射线发射控制命令,射线发射装置发出x射线,x射线穿过用户脸部,由图像生成装置生成角度的图像数据,记作
22.s26,控制器向其旋转电机发送反转控制信号,旋转电机反转,使其旋转输出驱动端带动u型旋转框架逆时针旋转回到初始位置;回到初始位置后,控制器向其旋转电机发送反转控制信号,旋转电机反转,使其旋转输出驱动端带动u型旋转框架逆时针旋转角度,| |表示取绝对值,控制器向图像生成装置发送生成用户齿部图像数据控制命令,以及向射线发射装置发送射线发射控制命令,射线发射装置发出x射线,x射线穿过用户脸部,由图像生成装置生成角度的图像数据,记作
23.s27,控制器向其旋转电机发送正转控制信号,旋转电机正转,使其旋转输出驱动端带动u型旋转框架顺时针旋转回到初始位置。
24.在本发明的一种优选实施方式中,在步骤s1之前还包括步骤s0,向输入显示装置内输入工作密码包括以下步骤:
25.s01,输入显示控制器判断是否接收到解锁按键输出的解锁触发命令:
26.若输入显示控制器接收到解锁按键输出的解锁触发命令,则执行下一步;
27.若输入显示控制器未接收到解锁按键输出的解锁触发命令,则继续等待,返回步骤s01;
28.s02,获取当前时间,将当前时间的时分秒相加,得到其迭代次数,输入显示控制器对所有数字分别进行a0次迭代散列计算,得到迭代码,将迭代码按照从大到小或者从小到大排序后,按照从左到右、从上到下的顺序将迭代码对应的数字依次显示在所有数字按键
上;
29.s03,获取输入的工作密码,判断输入的工作密码与输入显示控制器内存储的预设工作密码是否一致:
30.若输入的工作密码与输入显示控制器内存储的预设工作密码一致,则输入显示控制器向控制器发送工作信号;
31.若输入的工作密码与输入显示控制器内存储的预设工作密码一致,则返回步骤s02。
32.在本发明的一种优选实施方式中,迭代次数的计算方法为:
33.a0=a
hours
+a
minutes
+a
seconds
,
34.其中,a
hours
表示当前时间中的小时数;
35.a
minutes
表示当前时间中的分钟数;
36.a
seconds
表示当前时间中的秒数;
37.a0表示迭代次数。
38.在本发明的一种优选实施方式中,迭代码的计算方法为:
[0039][0040]
其中,num表示数字1~9之一;
[0041]
code(num)表示数字1~9之一所对应的迭代码;
[0042]
表示对数字1~9之一进行a0次迭代散列计算。
[0043]
综上所述,由于采用了上述技术方案,本发明能够获取不同角度的图片,便于治疗者掌握用户的状况。
[0044]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0045]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0046]
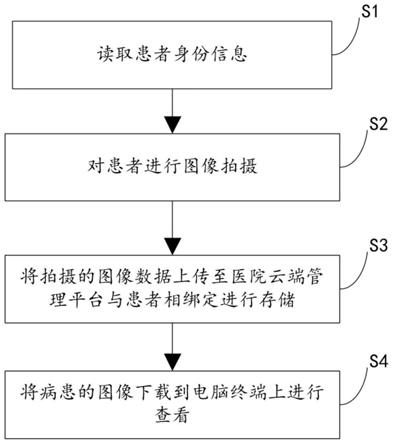
图1是本发明流程示意框图。
[0047]
图2是本发明结构示意图。
[0048]
图3是本发明结构示意图。
具体实施方式
[0049]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0050]
本发明还公开了一种海量图片采集工作方法,如图1所示,包括以下步骤:
[0051]
s1,读取用户身份信息;
[0052]
s2,对用户进行图像拍摄;
[0053]
s3,将拍摄的图像数据上传至云端管理控制平台与用户相绑定进行存储;
[0054]
s4,将用户的图像下载到电脑终端上进行查看。
[0055]
在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
[0056]
s11,将感应卡片靠近输入显示装置,感应卡片内存储有用户的身份信息包括姓名、性别、年龄、身份证号码、住址、住院id号之一或者任意组合,无线感应单元感应读取用户身份信息;
[0057]
s12,将步骤s11中获取到的用户身份信息存储在控制器内,待图像数据采集完毕后,将用户身份信息与用户身份信息所对应拍摄的图像数据上传至云端管理控制平台。
[0058]
或/和在步骤s2中包括以下步骤:
[0059]
s21,用户坐靠在座椅上,通过上升按键或/和下降按键调整横向固定板二3的高度,使其咬块15高度与用户口部高度相当:
[0060]
控制器检测到用户按住上升按键时,控制器向其丝杆电机发送正转控制信号,丝杆电机正转,使其移动螺母带动u型移动框架向上移动;
[0061]
控制器检测到用户按住下降按键时,控制器向其丝杆电机发送反转控制信号,丝杆电机反转,使其移动螺母带动u型移动框架向下移动;
[0062]
s22,用户通过从容纳箱从取出口套和额套,将其口套套在咬块15上,额套套在弧形板13上;
[0063]
s23,控制器判断是否接收到咬合传感器检测到咬合信号、贴靠传感器检测到贴靠信号、检测按键输出开始检测信号:
[0064]
若控制器持续接收到咬合传感器检测到咬合信号且贴靠传感器检测到贴靠信号,以及准备完成后接收到检测按键输出的开始检测信号,则控制器向其丝杆电机一发送正转控制信号,丝杆电机一正转,使其移动螺母一带动竖向移动板一11向竖向移动板二14靠近,以及控制器向其丝杆电机二发送正转控制信号,丝杆电机二正转,使其移动螺母二带动竖向移动板二14向竖向移动板一11靠近;当其竖向移动板一11与竖向移动板二14相距dcm时,cm表示长度单位厘米,竖向移动板一11与竖向移动板二14停止移动;
[0065]
否则,返回步骤s23;
[0066]
s24,控制器向图像生成装置12发送生成用户齿部图像数据控制命令,以及向射线发射装置16发送射线发射控制命令,射线发射装置16发出x射线,x射线穿过用户脸部,由图像生成装置12生成用户初始位置的图像数据,记作i0;
[0067]
s25,控制器向其旋转电机7发送正转控制信号,旋转电机7正转,使其旋转输出驱动端带动u型旋转框架顺时针旋转角度,控制器向图像生成装置12发送生成用户齿部图像数据控制命令,以及向射线发射装置16发送射线发射控制命令,射线发射装置16发出x射线,x射线穿过用户脸部,由图像生成装置12生成角度的图像数据,记作
[0068]
s26,控制器向其旋转电机7发送反转控制信号,旋转电机7反转,使其旋转输出驱动端带动u型旋转框架逆时针旋转回到初始位置;回到初始位置后,控制器向其旋转电机7发送反转控制信号,旋转电机7反转,使其旋转输出驱动端带动u型旋转框架逆时针旋转
角度,| |表示取绝对值,控制器向图像生成装置12发送生成用户齿部图像数据控制命令,以及向射线发射装置16发送射线发射控制命令,射线发射装置16发出x射线,x射线穿过用户脸部,由图像生成装置12生成角度的图像数据,记作
[0069]
s27,控制器向其旋转电机7发送正转控制信号,旋转电机7正转,使其旋转输出驱动端带动u型旋转框架顺时针旋转回到初始位置。
[0070]
或/和在步骤s1之前还包括步骤s0,向输入显示装置内输入工作密码包括以下步骤:
[0071]
s01,输入显示控制器判断是否接收到解锁按键输出的解锁触发命令:
[0072]
若输入显示控制器接收到解锁按键输出的解锁触发命令,则执行下一步;
[0073]
若输入显示控制器未接收到解锁按键输出的解锁触发命令,则继续等待,返回步骤s01;
[0074]
s02,获取当前时间,将当前时间的时分秒相加,得到其迭代次数,迭代次数的计算方法为:
[0075]
a0=a
hours
+a
minutes
+a
seconds
,
[0076]
其中,a
hours
表示当前时间中的小时数;
[0077]aminutes
表示当前时间中的分钟数;
[0078]aseconds
表示当前时间中的秒数;
[0079]
a0表示迭代次数;
[0080]
输入显示控制器对所有数字分别进行a0次迭代散列计算,得到迭代码,迭代码的计算方法为:
[0081][0082]
其中,num表示数字1~9之一;
[0083]
code(num)表示数字1~9之一所对应的迭代码;
[0084]
表示对数字1~9之一进行a0次迭代散列计算;优选采用十六进制的十六位结果的md5算法,对应的可以将十六进制转换为十进制便于判断大小。
[0085]
将迭代码按照从大到小或者从小到大排序后,按照从左到右、从上到下的顺序将迭代码对应的数字依次显示在所有数字按键上;例如,获取到的当前时间为02:01:02,其迭代次数获取到的当前时间为01:04:00,其迭代次数获取到的当前时间为03:01:01,其迭代次数
即对数字1执行5次迭代散列计算如下:
[0086][0087]
b2=hashf[b1]
[0088]
=hashf[a0b923820dcc509a],
[0089]
=62b0fdae03399e54b3=hashf[b2]
[0090]
=hashf[62b0fdae03399e54],
[0091]
=4e6d15993c0ba887
[0092]
b4=hashf[b3]
[0093]
=hashf[4e6d15993c0ba887],
[0094]
=3929cd76c3ff7482
[0095][0096]
对数字2执行5次迭代散列计算如下:
[0097][0098]
c2=hashf[c1]
[0099]
=hashf[9d4c2f636f067f89],
[0100]
=c3a87c3ec90b30a0
[0101]
c3=hashf[c2]
[0102]
=hashf[c3a87c3ec90b30a0],
[0103]
=ac63a5b6cd2a3aa4
[0104]
c4=hashf[c3]
[0105]
=hashf[ac63a5b6cd2a3aa4],
[0106]
=28f51f170f3d1048
[0107][0108]
对数字3执行5次迭代散列计算如下:
[0109][0110]
d2=hashf[d1]
[0111]
=hashf[4b5ce2fe28308fd9],
[0112]
=261cbd571797bf53
[0113]
d3=hashf[d2]
[0114]
=hashf[261cbd571797bf53],
[0115]
=dd410e7c3d33af63
[0116]
d4=hashf[d3]
[0117]
=hashf[dd410e7c3d33af63],
[0118]
=8f1a118613f53dc1
[0119][0120]
对数字4执行5次迭代散列计算如下:
[0121][0122]
e2=hashf[e1]
[0123]
=hashf[a2f3e71d9181a67b],
[0124]
=5d660c459770ba1a
[0125]
e3=hashf[e2]
[0126]
=hashf[5d660c459770ba1a],
[0127]
=c58ac4f789bf8b63
[0128]
e4=hashf[e3]
[0129]
=hashf[c58ac4f789bf8b63],
[0130]
=7448dfe609578845
[0131][0132]
迭代码从小到大排列为:d5<c5<e5<b5;
[0133]
迭代码对应的数字为:3 2 4 1。数字一般排列的顺序为1 2 3 4,经过上述方法,按键上的数字次序发生了变化,变为了3 2 4 1。可以增强工作密码的安全使用。
[0134]
s03,获取输入的工作密码,判断输入的工作密码与输入显示控制器内存储的预设
工作密码是否一致:
[0135]
若输入的工作密码与输入显示控制器内存储的预设工作密码一致,则输入显示控制器向控制器发送工作信号;
[0136]
若输入的工作密码与输入显示控制器内存储的预设工作密码不一致,则返回步骤s02。
[0137]
在本发明的一种优选实施方式中,在步骤s4中将用户的图像下载到电脑终端上进行查看包括以下步骤:
[0138]
s41,云端管理控制平台判断是否接收到登录云端管理控制平台控制命令:
[0139]
若云端管理控制平台接收到登录云端管理控制平台控制命令,则执行下一步;
[0140]
若云端管理控制平台未接收到登录云端管理控制平台控制命令,则继续等待,返回步骤s41;
[0141]
s42,云端管理控制平台获取其待登录云端管理控制平台的电脑终端的id号,该id号为cpu序列号;
[0142]
s43,根据电脑终端的id号查询电脑终端的id号所对应的手机号码,向手机号码发送登陆码;
[0143]
s44,电脑终端判断输入的登陆码与电脑终端生成的首次码是否一致:
[0144]
若输入的登陆码与电脑终端生成的首次码一致,则电脑终端生成安全码,发送安全码至云端管理控制平台;其首次码的生成方式为:
[0145]
idcode
′
=hashf[ti
′
ξidnum
′
],
[0146]
其中,表示散列计算;
[0147]
ti
′
表示电脑终端发送电脑终端的id号时间;
[0148]
idnum
′
表示电脑终端的id号;
[0149]
idcode
′
表示电脑终端生成的首次码;
[0150]
ξ表示匹配联结符;截取首次码的前六位作为登陆码;
[0151]
若输入的登陆码与电脑终端生成的首次码不一致,则该电脑终端为用户首次登录终端;
[0152]
s45,云端管理控制平台接收到安全码后,判断其云端管理控制平台接收到的安全码与云端管理控制平台生成的校验码是否一致:
[0153]
若云端管理控制平台接收到的安全码与云端管理控制平台生成的校验码一致,则电脑终端登录云端管理控制平台成功;执行步骤s46;
[0154]
若云端管理控制平台接收到的安全码与云端管理控制平台生成的校验码不一致,则电脑终端登录云端管理控制平台失败;
[0155]
s46,从云端管理控制平台上下载对应用户的图像数据到电脑终端上进行查看。
[0156]
在本发明的一种优选实施方式中,在步骤s43中登陆码的生成方式包括以下步骤:
[0157]
s431,获取电脑终端发送电脑终端的id号时间;
[0158]
s432,根据电脑终端发送电脑终端的id号时间和电脑终端的id号,得到其id码;其id码的生成方式为:
[0159]
idcode=hashf[tiξidnum],
[0160]
其中,表示散列计算;
[0161]
ti表示云端管理控制平台接收到的电脑终端发送电脑终端的id号时间;
[0162]
idnum表示云端管理控制平台接收到电脑终端的id号;
[0163]
idcode表示云端管理控制平台生成的id码;
[0164]
ξ表示匹配联结符;
[0165]
s433,截取id码的前六位作为登陆码。
[0166]
本发明还公开了一种海量图片采集工作方法的处理系统,如图2~3所示,包括固定安装底座,在固定安装底座上设置有竖向安装柱6,在竖向安装柱6上设置有可在竖向安装柱6上上下移动的移动结构,在移动结构上设置有可在移动结构上旋转的旋转结构,在旋转结构上设置有用于拍摄用户17齿部图像的图像拍摄装置;
[0167]
通过移动结构调节用户的舒适姿态,通过旋转结构带动图像拍摄装置拍摄不同角度齿部的图像数据传输至云端管理控制平台进行存储。
[0168]
在本发明的一种优选实施方式中,移动结构包括竖向移动板2,在竖向移动板2顶端设置有横向固定板一1,在竖向移动板2底端设置有横向固定板二3,竖向移动板2、横向固定板一1和横向固定板二3构成u型移动框架;
[0169]
在横向固定板二3的末端上部设置有用于用户17口部咬住的咬块15,在咬块15上设置有用于感应用户17咬住咬块15的咬合传感器,咬合传感器的咬合信号输出端与控制器的咬合信号输入端相连;
[0170]
在竖向移动板2上设置有用于固定安装输入显示装置的输入显示装置固定安装座,输入显示装置固定安装在输入显示装置固定安装座上,输入显示装置的输入显示数据端与控制器的数据连接端相连;
[0171]
在竖向安装柱6内设置有丝杆螺母,丝杆螺母上的移动螺母与竖向移动板2固定安装,丝杆螺母的丝杆电机与控制器的上下移动正反转控制端相连;当其控制器向其丝杆电机发送正转控制信号,丝杆电机正转,使其移动螺母带动u型移动框架向上移动;当其控制器向其丝杆电机发送反转控制信号,丝杆电机反转,使其移动螺母带动u型移动框架向下移动。
[0172]
在本发明的一种优选实施方式中,输入显示装置包括矩形状壳体,在壳体表面镶嵌有显示屏4和m个输入按键5,分别为第1输入按键、第2输入按键、第3输入按键、
……
、第m输入按键,在壳体内设置有用于固定安装pcb电路板的pcb电路板固定安装座,pcb电路板固定安装在pcb电路板固定安装座上,在pcb电路板上设置有输入显示控制器、无线感应单元和数据传输单元;
[0173]
显示屏4的显示数据端与输入显示控制器的显示数据端相连,第m输入按键的第一端与输入显示控制器的按键输入第m端相连,第m输入按键的第二端与电源地相连;此时,第1输入按键的第一端与输入显示控制器的按键输入第1端相连,第1输入按键的第二端与电源地相连;第2输入按键的第一端与输入显示控制器的按键输入第2端相连,第2输入按键的第二端与电源地相连;第3输入按键的第一端与输入显示控制器的按键输入第3端相连,第3输入按键的第二端与电源地相连;
……
;第m输入按键的第一端与输入显示控制器的按键输入第m端相连,第m输入按键的第二端与电源地相连;无线感应单元的感应数据输出端与输
入显示控制器的感应数据输入端相连,输入显示控制器的数据传输端与数据传输单元的数据传输端相连,数据传输单元的数据连接端与控制器的数据连接端相连。通过按键输入仪器的工作密码,仪器开启工作;用户可以利用感应卡片(身份证、社保卡)被无线感应单元感应实现用户身份的读取。其中,第1输入按键、第2输入按键、第3输入按键、
……
、第m输入按键可以分别为可显示变化的数字按键和固定功能的按键,其中,第1输入按键、第2输入按键、第3输入按键、
……
、第10输入按键为可显示变化的数字按键,分别为第1显示变化数字输入按键、第2显示变化数字输入按键、第3显示变化数字输入按键、
……
、第10显示变化数字输入按键,第1
′
显示变化数字输入按键包括第1
′
按键及设置在第1
′
按键上的第1
′
数字显示屏,第1
′
按键的第一端与输入显示控制器的按键输入第1
′
端相连,第1
′
数字显示屏的数字显示端与输入显示控制器的数字显示数据第1
′
端相连,1
′
=1、2、3、
……
、10,即是:第1显示变化数字输入按键包括第1按键及设置在第1按键上的第1数字显示屏,第1按键的第一端与输入显示控制器的按键输入第1端相连;第2显示变化数字输入按键包括第2按键及设置在第2按键上的第2数字显示屏,第2按键的第一端与输入显示控制器的按键输入第2端相连;第3显示变化数字输入按键包括第3按键及设置在第3按键上的第3数字显示屏,第3按键的第一端与输入显示控制器的按键输入第3端相连;第4显示变化数字输入按键包括第4按键及设置在第4按键上的第4数字显示屏,第4按键的第一端与输入显示控制器的按键输入第4端相连;第5显示变化数字输入按键包括第5按键及设置在第5按键上的第5数字显示屏,第5按键的第一端与输入显示控制器的按键输入第5端相连;第6显示变化数字输入按键包括第6按键及设置在第6按键上的第6数字显示屏,第6按键的第一端与输入显示控制器的按键输入第6端相连;第7显示变化数字输入按键包括第7按键及设置在第7按键上的第7数字显示屏,第7按键的第一端与输入显示控制器的按键输入第7端相连;第8显示变化数字输入按键包括第8按键及设置在第8按键上的第8数字显示屏,第8按键的第一端与输入显示控制器的按键输入第8端相连;第9显示变化数字输入按键包括第9按键及设置在第9按键上的第9数字显示屏,第9按键的第一端与输入显示控制器的按键输入第9端相连;第10显示变化数字输入按键包括第10按键及设置在第10按键上的第10数字显示屏,第10按键的第一端与输入显示控制器的按键输入第10端相连;第1数字显示屏、第2数字显示屏、第3数字显示屏、第4数字显示屏、第5数字显示屏、第6数字显示屏、第7数字显示屏、第8数字显示屏、第9数字显示屏、第10数字显示屏这10个显示变化数字输入按键显示的数字为0~9之一,且完全不同。固定功能的按键包括确定按键、后退按键、取消按键、解锁按键之一或者任意组合,也可以根据实际情况设置按键功能。
[0174]
在本发明的一种优选实施方式中,旋转结构包括横向旋转板10,在横向旋转板10的两末端设置有竖向移动板一11和竖向移动板二14,横向旋转板10、竖向移动板一11和竖向移动板二14构成u型旋转框架;
[0175]
在横向固定板一1的末端设置有旋转电机7,旋转电机7的旋转输出驱动端与横向旋转板10固定,旋转电机7的正转控制端与控制器的旋转正反转控制端相连;当其控制器向其旋转电机7发送正转控制信号,旋转电机7正转,使其旋转输出驱动端带动u型旋转框架顺时针旋转;当其控制器向其旋转电机7发送反转控制信号,旋转电机7反转,使其旋转输出驱动端带动u型旋转框架逆时针旋转;
[0176]
在横向旋转板10内设置有丝杆螺母一和丝杆螺母二,丝杆螺母一上的移动螺母一
与竖向移动板一11的顶端固定安装,丝杆螺母一上的丝杆电机一与控制器的第一左右移动正反转控制端相连,当其控制器向其丝杆电机一发送正转控制信号,丝杆电机一正转,使其移动螺母一带动竖向移动板一11向竖向移动板二14靠近;当其控制器向其丝杆电机一发送反转控制信号,丝杆电机一反转,使其移动螺母一带动竖向移动板一11向竖向移动板二14远离;
[0177]
丝杆螺母二的移动螺母二与竖向移动板二14的顶端固定安装,丝杆螺母二上的丝杆电机二与控制器的第二左右移动正反转控制端相连,当其控制器向其丝杆电机二发送正转控制信号,丝杆电机二正转,使其移动螺母二带动竖向移动板二14向竖向移动板一11靠近;当其控制器向其丝杆电机二发送反转控制信号,丝杆电机二反转,使其移动螺母二带动竖向移动板二14向竖向移动板一11远离。
[0178]
在本发明的一种优选实施方式中,在横向固定板一1还设置有额靠装置,额靠装置包括在横向旋转板10上设置有贯穿横向旋转板10的贯穿孔,竖向支撑杆8穿过贯穿孔竖向设置在横向固定板一1下部的,在竖向支撑杆8下部末端设置有于用户17额头尺寸相适应的弧形板13,在弧形板13上设置有贴靠传感器,贴靠传感器的贴靠信号输出端与控制器的贴靠信号输入端相连。
[0179]
在本发明的一种优选实施方式中,图像拍摄装置包括设置在竖向移动板二14内的射线发射装置16以及设置在竖向移动板一11内的图像生成装置12;
[0180]
射线发射装置16的控制端与控制器的射线控制端相连,图像生成装置12的图像发送端与控制器的图像接收端相连;
[0181]
或/和在竖向安装柱6内设置有用于固定安装控制板的控制板固定安装座,控制板固定安装在控制板固定安装座上,在控制板上设置有控制器和数据传输模块,数据传输模块包括数据无线传输模块或/和数据有线传输模块;
[0182]
数据无线传输模块包括数据无线wifi传输模块或/和数据无线bluetooth传输模块,数据无线wifi传输模块的数据传输端与控制器的wifi数据传输端相连,数据无线bluetooth传输模块的数据传输端与控制器的bluetooth数据传输端相连;
[0183]
数据有线传输模块包括有线百兆网卡传输模块或/和有线千兆网卡传输模块,有线百兆网卡传输模块与控制器的百兆数据传输端相连,有线千兆网卡传输模块与控制器的千兆数据传输端相连;
[0184]
将拍摄的图像数据通过无线wifi传输模块、数据无线bluetooth传输模块、有线百兆网卡传输模块、有线千兆网卡传输模块之一上传至云端管理控制平台;
[0185]
或/和还包括设置在竖向安装柱6上的语音提示警告器,语音提示警告器的语音数据端与控制器的语音数据端相连;当其咬合传感器检测到用户咬合住咬块15,而贴靠传感器未检测到用户额头贴靠在弧形板13,则语音提示警告器发出提示信息,该提示信息为请将额头贴靠在弧形板13上;
[0186]
当贴靠传感器检测到用户额头贴靠在弧形板13,而咬合传感器未检测到用户咬合住咬块15,则语音提示警告器发出提示信息,该提示信息为请将咬块15咬合住;
[0187]
当其咬合传感器检测到用户咬合住咬块15,同时贴靠传感器检测到用户额头贴靠在弧形板13时,则控制器向图像生成装置12发送生成用户齿部图像数据控制命令,以及向射线发射装置16发送射线发射控制命令,射线发射装置16发出x射线,x射线穿过用户脸部,
由图像生成装置12生成用户齿部图像数据;控制器并向旋转电机7发送正转控制命令或者反转控制命令,图像生成装置12生成角度的用户齿部图像数据,表示从初始位置顺时针旋转角度,表示从初始位置逆时针旋转角度,表示在初始位置,未旋转;
[0188]
或/和在横向固定板二3下端设置有用于回收使用过的口套和额套的回收箱和用于存放未使用的口套或/和额套的容纳箱,在容纳箱内放置有多个口套或/和额套;
[0189]
或/和还包括在竖向安装柱6旁边还设置有可移动的用于用户坐靠的座椅;
[0190]
或/和在横向固定板二3上设置有用于调节u型移动框架高度的按键组,按键组包括上升按键、下降按键和检测按键,上升按键的第一端与电源地相连,上升按键的第二端与控制器的上升控制信号输入端相连,当其用户按住上升按键时,控制器向其丝杆电机发送正转控制信号,丝杆电机正转,使其移动螺母带动u型移动框架向上移动;
[0191]
下降按键的第一端与电源地相连,下降按键的第二端与控制器的下降控制信号输入端相连,当其用户按住下降按键时,控制器向其丝杆电机发送反转控制信号,丝杆电机反转,使其移动螺母带动u型移动框架向下移动;
[0192]
检测按键的第一端与电源地相连,检测按键的第二端与控制器的检测控制信号输入端相连,当其用户按下检测按键时,且同时咬合传感器检测到用户咬合住咬块15,贴靠传感器检测到用户额头贴靠在弧形板13上,则控制器向图像生成装置12发送生成用户齿部图像数据控制命令,以及向射线发射装置16发送射线发射控制命令,射线发射装置16发出x射线,x射线穿过用户脸部,由图像生成装置12生成用户齿部图像数据;控制器并向旋转电机7发送正转控制命令或者反转控制命令,图像生成装置12生成角度的用户齿部图像数据,表示从初始位置顺时针旋转角度,表示从初始位置逆时针旋转角度,表示在初始位置,未旋转。
[0193]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1