未知室内环境中基于无人机群的基站自主协同部署方法
1.本发明涉及无人机应用技术领域,具体是一种未知室内环境中基于无人机群的基站自主协同部署方法。
背景技术:
2.当高层建筑、地下矿井等封闭空间发生火灾、地震等灾害时,利用无人智能装备进行配合搜救无疑可以极大程度地提高搜救效率,从而提高遇险人员的存活率并减少救援人员的人身风险。但是由于灾害现场环境的复杂性和未知性,可能存在通信受限、实时定位精度不足等问题,使得搜救人员入室后的安全问题难以得到真正的保障。
技术实现要素:
3.本发明提供一种未知室内环境中基于无人机群的基站自主协同部署方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
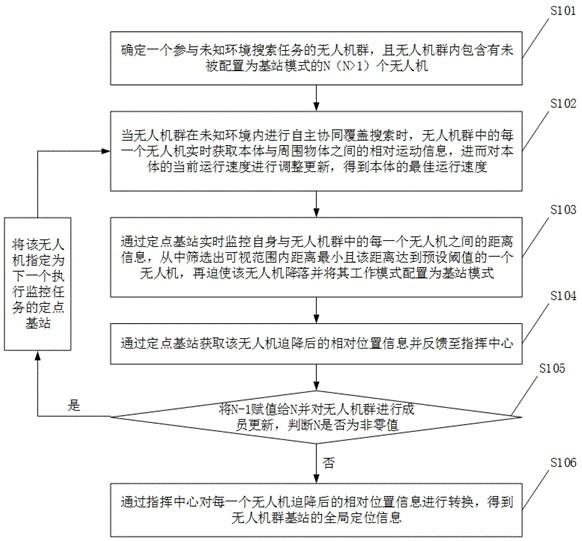
4.本发明提供一种未知室内环境中基于无人机群的基站自主协同部署方法,所述方法包括:确定一个参与未知室内环境搜索任务的无人机群,且无人机群内包含有未被配置为基站模式的n(n》1)个无人机;当无人机群在未知室内环境内进行自主协同覆盖搜索时,无人机群中的每一个无人机实时获取本体与周围物体之间的相对运动信息,进而对本体的当前运行速度进行调整更新,得到本体的最佳运行速度;通过定点基站实时监控自身与无人机群中的每一个无人机之间的距离信息,从中筛选出可视范围内距离最小且该距离达到预设阈值的一个无人机,再迫使该无人机降落并将其工作模式配置为基站模式;通过定点基站获取该无人机降落后的相对位置信息并反馈至指挥中心;将n-1赋值给n并对无人机群进行成员更新,判断n是否为非零值;若是,则将该无人机指定为下一个执行监控任务的定点基站,再返回继续控制更新后的无人机群在未知室内环境内进行自主协同覆盖搜索;若否,则通过指挥中心对每一个无人机降落后的相对位置信息进行转换,得到无人机群基站的全局定位信息。
5.进一步地,所述无人机群中的每一个无人机实时获取本体与周围物体之间的相对运动信息包括:无人机群中的每一个无人机获取本体与邻近所有障碍物之间的相对距离信息和相对速度信息、本体与邻近其他无人机之间的相对距离信息和相对速度信息、以及邻近其他无人机的位置信息和速度信息。
6.进一步地,所述对本体的当前运行速度进行调整更新,得到本体的最佳运行速度包括:
无人机群中的每一个无人机基于本体与邻近其他无人机之间的相对距离信息以及邻近其他无人机的位置信息,计算出本体对进入其既定安全飞行范围内的所有无人机所产生的排斥速度信息;无人机群中的每一个无人机基于本体与邻近其他无人机之间的相对速度信息以及邻近其他无人机的速度信息,计算出本体在执行集群任务过程中对邻近其他无人机所产生的粘性速度信息;无人机群中的每一个无人机结合本体的当前运行速度、排斥速度信息、粘性速度信息以及与邻近所有障碍物之间的相对速度信息,计算出本体的最佳运行速度。
7.进一步地,每一个无人机本体的最佳运行速度的计算公式为:其中,为第i个无人机的最佳运行速度,为第i个无人机的当前运行速度,为第i个无人机的初始自驱动速度,为第i个无人机所产生的排斥速度信息,为第i个无人机所产生的粘性速度信息,n为障碍物总数量,为第i个无人机与第k个障碍物之间的相对速度信息。
8.进一步地,所述预设阈值为定点基站所规定的中继距离。
9.进一步地,所述通过定点基站获取该无人机降落后的相对位置信息包括:通过定点基站所设置的图像采集装置对该无人机所在区域的图像信息进行采集,再从所述图像信息中提取出该无人机相对于定位基站的方位信息;基于所述方位信息对定点基站所设置的云台装置进行偏转姿态调整,再通过云台装置上所设置的激光测距装置对该无人机相对于定点基站的距离信息进行测量;根据该无人机相对于定点基站的方位信息和距离信息,确定该无人机相对于定点基站的位置信息。
10.进一步地,所述通过指挥中心对每一个无人机降落后的相对位置信息进行转换,得到无人机群基站的全局定位信息包括:通过指挥中心将每一个无人机降落后的相对位置信息进行融合,得到所有无人机降落后的全局相对位置信息;以初始的定点基站所在位置为基准,将所有无人机降落后的全局相对位置信息转换成全局绝对位置信息。
11.本发明至少具有以下有益效果:通过无人机群中每一个无人机之间的信息交互与自主速度更新,使得无人机群可在未知室内环境内进行有效搜索,在此过程中将无人机群中每一个无人机作为可移动的定位基站,将非视距定位问题转化为视距定位问题,由此实现无人机群基站在未知室内环境内的自主覆盖布设,从而提高搜救人员进入未知室内环境内的实时定位精度,为快速搜救工作提供有利条件。
附图说明
12.附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本
发明的实施例一起用于解释本发明的技术方案,并不构成对本发明技术方案的限制。
13.图1是本发明实施例中的无人机的结构组成示意图;图2是本发明实施例中的一种未知室内环境中基于无人机群的基站自主协同部署方法的流程示意图。
具体实施方式
14.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
15.需要说明的是,虽然在系统示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
16.请参考图1,图1示出了本发明实施例中的无人机的结构组成示意图,该无人机包括毫米波探测装置、uwb定位装置、无线通信装置、数据处理装置、飞控装置、图像采集装置、云台装置和激光测距装置;其中,所述无线通信装置、所述数据处理装置和所述飞控装置集成在该无人机内置的印刷电路板上。
17.基本的,所述毫米波探测装置和所述uwb定位装置分别设置在该无人机的两个机翼上,当该无人机在自主执行未知室内环境内的覆盖搜索任务时,所述毫米波探测装置用于探测出该无人机与邻近所有障碍物之间的相对距离信息和相对速度信息并将其反馈至所述数据处理装置,所述uwb定位装置用于探测出该无人机与邻近其他无人机之间的相对距离信息和相对速度信息并将其反馈至所述数据处理装置,所述无线通信装置用于接收其他无人机的位置信息和速度信息并将其反馈至所述数据处理装置,再由所述数据处理装置根据上述所获取到的各个相对运动信息来计算出该无人机的最佳运行速度,最终由所述飞控装置对该无人机的当前飞行状态进行调整。
18.此外,所述图像采集装置和所述云台装置分别设置在该无人机的机体顶部,所述激光测距装置固定安装在所述云台装置上,当该无人机已经降落成为定点基站之后,所述图像采集装置用于采集相邻无人机所在区域的图像信息并将其反馈至所述数据处理装置来执行方位信息的提取,所述云台装置用于根据该方位信息对自身姿态的偏转情况进行调整,以使得所述激光测距装置可准确探测到该相邻无人机相对于该定点基站的距离信息,进而通过所述数据处理装置根据该方位信息和该距离信息确定该相邻无人机相对于该定点基站的位置信息之后,再将该相对位置信息通过所述无线通信装置上载至指挥中心,其中该相邻无人机应当已执行完该定点基站所下发的就地降落指令。
19.其中,所述图像采集装置采用鱼眼摄像头,在使用过程中并不需要借助另一个云台装置的辅助移动即可采集到相邻无人机所在区域的图像信息,由此可以减轻无人机的自身机体重量。
20.基于本发明实施例所涉及到的无人机,图2对未知室内环境中基于无人机群的基站自主协同部署方法进行详细阐述。
21.请参考图2,图2示出了本发明实施例中的一种未知室内环境中基于无人机群的基
站自主协同部署方法的流程示意图,所述方法包括以下步骤:s101、确定一个参与未知室内环境搜索任务的无人机群,且无人机群内包含有未被配置为基站模式的n(n》1)个无人机。
22.s102、当无人机群在未知室内环境内进行自主协同覆盖搜索时,无人机群中的每一个无人机实时获取本体与周围物体之间的相对运动信息,进而对本体的当前运行速度进行调整更新,得到本体的最佳运行速度。
23.本发明实施过程包括:(1)无人机群中的每一个无人机获取本体与邻近所有障碍物之间的相对距离信息和相对速度信息、本体与邻近其他无人机之间的相对距离信息和相对速度信息、以及邻近其他无人机的位置信息和速度信息。
24.(2)无人机群中的每一个无人机基于本体与邻近其他无人机之间的相对距离信息以及邻近其他无人机的位置信息,计算出本体对进入其既定安全飞行范围内的所有无人机所产生的排斥速度信息为:其中,为第i个无人机对进入其既定安全飞行范围内的所有无人机所产生的排斥速度信息,m1为进入第i个无人机既定安全飞行范围内的无人机总数量,为第i个无人机对进入既定安全飞行范围内的第j个无人机所产生的排斥速度信息,为线性控制系数,为第i个无人机的既定安全距离值,为第i个无人机的位置矢量,为第j个无人机的位置矢量,为第i个无人机与第j个无人机之间的相对距离值。
25.(3)无人机群中的每一个无人机基于本体与邻近其他无人机之间的相对速度信息以及邻近其他无人机的速度信息,计算出本体在执行集群任务过程中对邻近其他无人机所产生的粘性速度信息为:其中,为第i个无人机在执行集群任务过程中对其他无人机所产生的粘性速度信息,m2为在当前无人机群中除第i个无人机外的剩余无人机总数量,为速度校准时的误差修正系数,为速度差定值,为第i个无人机相对于剩余所有无人机中的第j个无人机的平滑速度衰减值,为第i个无人机的速度矢量,为第j个无人机的速度矢量,为第i个无人机与第j个无人机之间的相对速度值。
26.(4)无人机群中的每一个无人机结合本体的当前运行速度、排斥速度信息、粘性速度信息以及与邻近所有障碍物之间的相对速度信息,计算出本体的最佳运行速度为:其中,为第i个无人机的最佳运行速度,为第i个无人机的当前运行速度,
为第i个无人机的初始自驱动速度,为第i个无人机所产生的排斥速度信息,为第i个无人机所产生的粘性速度信息,n为障碍物总数量,为第i个无人机与第k个障碍物之间的相对速度信息。
27.s103、通过定点基站实时监控自身与无人机群中的每一个无人机之间的距离信息,从中筛选出可视范围内距离最小且该距离达到预设阈值的一个无人机,再迫使该无人机降落并将其工作模式配置为基站模式。
28.需要说明的是,当无人机群进入未知室内环境内部执行搜索任务之前,在未知室内环境外部的入口处实际上已设置有一个位置确定并且预先被配置为基站模式的无人机,将其定义为初始的定点基站,此时该初始的定点基站同样具备有如图1所示出的各个组成装置,并由该初始的定点基站开始对无人机群进行监控。
29.在本发明实施例中,所述预设阈值实际为定点基站所规定的中继距离,在执行步骤s102所提及到的逐个无人机运行速度的实时更新过程中,定点基站也在以自身的中继距离对当前无人机群中每一个无人机的飞行距离进行实时跟踪判断,直至获取到一个无人机以同时满足其距离定点基站最近且与定点基站之间的距离值为该中继距离这两个条件。
30.在定点基站筛选出该无人机之后,首先由定点基站通过无线通信方式直接向该无人机下发操作指令,再由该无人机的数据处理装置从所述操作指令中解析出就地降落指令和信息配置指令,此时该无人机的飞控装置根据所述就地降落指令来引导机体降落,而该无人机的uwb定位装置则根据所述信息配置指令将自身的当前运行模式转换为基站模式,以提供在未知室内环境内的定位信号。
31.s104、通过定点基站获取该无人机降落后的相对位置信息并反馈至指挥中心。
32.本发明实施过程包括:(1)通过定点基站所设置的图像采集装置对该无人机所在区域的图像信息进行采集,再通过定点基站所设置的数据处理装置从所述图像信息中提取出该无人机相对于定位基站的方位信息,其中所述方位信息包括方位角和俯仰角。
33.(2)通过所述数据处理装置基于所述方位信息对定点基站所设置的云台装置进行偏转姿态调整,再通过云台装置上所设置的激光测距装置对该无人机相对于定点基站的距离信息进行测量。
34.(3)根据该无人机相对于定点基站的方位信息和距离信息,确定该无人机相对于定点基站的位置信息,具体表现为:首先结合所述俯仰角和所述距离信息,计算该无人机相对于地面的高度信息;其次结合所述俯仰角、所述高度信息和所述方位角,计算该无人机相对于定点基站的平面距离信息;最后结合所述高度信息和所述平面距离信息,确定该无人机相对于定点基站的位置信息。
35.s105、将n-1赋值给n并对无人机群进行成员更新,判断n是否为非零值。
36.在本发明实施例中,将在步骤s103中被配置为基站模式的该无人机从无人机群中剔除出去,由此实现成员更新任务,再判断更新后的无人机群内是否还存在未被配置为基站模式的无人机,相应的判断结果为:若存在,则将该无人机指定为下一个执行如步骤s103中所提及到的监控任务的定点基站,再返回继续执行步骤s102,以控制更新后的无人机群在未知室内环境内进行自主协同覆盖搜索;若不存在,则继续执行步骤s106。
37.s106、通过指挥中心对每一个无人机降落后的相对位置信息进行转换,得到无人机群基站的全局定位信息。
38.在本发明实施过程包括:(1)通过指挥中心将每一个无人机降落后的相对位置信息进行融合,得到所有无人机降落后的全局相对位置信息,具体表现为:首先根据每一个无人机降落后的相对位置信息,利用现有的mds(multidimensional scaling,多维尺度分析)方法对降落后的所有无人机进行节点分簇,从而构建出若干个局部相对坐标系;其次从中选取出包含无人机节点最多的两个簇,并对这两个簇所关联的两个局部相对坐标系进行融合,进而得到一个融合后的局部相对坐标系;接着以融合后的局部相对坐标系为基准坐标系,从剩下的所有簇中选择一个包含无人机节点最多的簇,并将该簇所对应的局部相对坐标系进行再融合;以此类推,直至将所有局部相对坐标系融合为一个全局相对坐标系。
39.其中,任意两个局部相对坐标系进行融合时的坐标变换公式为:式中,为单个无人机在待融合的局部相对坐标系内的相对位置信息,此时该无人机应当仅包含在该待融合的局部相对坐标系所关联的簇中,为该无人机在融合到基准坐标系内的全局相对位置信息,为以上两个局部相对坐标系之间的旋转矩阵,为以上两个局部相对坐标系中的两个坐标原点之间的平移矩阵。
40.(2)以初始的定点基站所在位置为基准,将所有无人机降落后的全局相对位置信息转换成全局绝对位置信息,其中的转换公式为:式中,为单个无人机在完全融合后的全局相对坐标系内的全局相对位置信息,为该无人机转换到该初始的定点基站所在世界坐标系内的全局绝对位置信息,为全局相对坐标系和世界坐标系之间的旋转矩阵,为全局相对坐标系的原点到世界坐标系的原点之间的平移矩阵。
41.以上是对本发明的较佳实施进行具体说明,但本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种等同变形或替换,这些等同的变形或替换均包含在本发明权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1