一种无人机读取图像的热释红外打猎相机系统及控制方法与流程
1.本发明属于打猎相机技术领域,具体涉及一种无人机读取图像的热释红外打猎相机系统及控制方法。
背景技术:
2.打猎相机,又称为野外红外相机,用于安装在野外监测、观察野生动物,以获取野外人和动物的活动轨迹;具体通过打猎相机上的热释红外传感器感应到人或者动物后自动拍摄,拍摄下来的视频、图像(照片)一般存储在打猎相机的sd卡里面。但是申请人发现:若用户要读取打猎相机sd卡内存储的视频图像,通常需要亲身到达打猎相机的安装位置,然后取回sd卡或者拷贝到电脑等终端设备上,操作十分费时、麻烦,极不方便;为此市场上出现了一种带有4g5g功能的打猎相机,这种打猎相机能够通过有4g 5g基站信号的地方也可以通过基站的移动网络将sd卡内存储的视频图像发送到互联网上,从而实现在办公地点或者家里就可以获取到这些视频图像,十分方便,然而绝大多数野外环境都是荒无人烟且没有基站信号,要获取打猎相机拍摄到的视频图像仍需要亲身到打猎相机的安装位置取回sd卡或者拷贝。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的在于提供一种利用无人机飞到野外的热释红外打猎相机附近,下载视频图像后返航,完全不受基站信号的限制,适用性强,操作使用简单、方便、快捷的热释红外打猎相机系统及控制方法。
4.为解决上述问题,本发明所采用的技术方案如下:
5.第一方面,本发明提供了一种无人机读取图像的热释红外打猎相机系统,包括:
6.热释红外打猎相机子系统:包括分布设置在野外的多个热释红外打猎相机,用于拍摄、存储动物的视频图像;
7.无人机子系统:包括一台以上无人机,用于接收飞行任务指令以及一台以上无人机根据飞行任务指令飞行至指定位置与指定的热释红外打猎相机建立连接、下载和存储动物的视频图像,下载完毕后返航;
8.控制器:用于接收操作指令,根据操作指令形成飞行任务指令发送至无人机子系统;
9.而且所述热释红外打猎相机与无人机之间采用近距离无线连接。
10.本发明通过上述方案,能够利用无人机飞到安装在野外的热释红外打猎相机附近,并下载热释红外打猎相机上存储的视频图像后返航,实现了无人机远程飞行后读取野外的热释红外打猎相机拍摄的视频图像,完全不受是否具有基站信号的环境条件限制,适用性强,且无需用户亲身到达打猎相机的安装位置,操作使用简单、方便、快捷。
11.在一种可能的设计中,所述无人机设置有控制芯片、用于与热释红外打猎相机无线连接的第一无线通讯模块、用于与控制器无线连接的第二无线通讯模块,以及用于存储
下载的动物视频图像的存储器,所述第一无线通讯模块、第二无线通讯模块和存储器均与控制芯片连接,所述热释红外打猎相机设置有与第一无线通讯模块相匹配的第三无线通讯模块,而且所述第一无线通讯模块和第三无线通讯模块为近距离无线通讯模块。
12.在一种可能的设计中,所述第一无线通讯模块和第三无线通讯模块为wifi通讯模块、蓝牙通讯模块和zigbee通讯模块中的一种。
13.在一种可能的设计中,所述热释红外打猎相机和无人机均具有唯一性id,所述控制器存储有所述热释红外打猎相机和无人机的id信息。
14.第二方面,本发明还提供了一种无人机读取图像的热释红外打猎相机系统的控制方法,包括:
15.s1.接收用户操作指令;
16.s2.生成飞行任务指令,根据用户操作指令生成无人机的飞行任务指令,并发达至无人机子系统;
17.s3.执行飞行任务指令,根据飞行任务指令安排一台以上无人机飞行至指定位置,并与指定的热释红外打猎相机建立连接、下载和存储动物的视频图像,下载完毕后返航。
18.在一种可能的设计中,所述飞行任务指令至少包含飞行路线、热释红外打猎相机的id、联机请求指令和下载请求指令。
19.在一种可能的设计中,s3具体包括:
20.从飞行任务指令解析出飞行路线、热释红外打猎相机的id、联机请求指令和下载请求指令;
21.无人机根据飞行路线自动导航飞行至指定位置,并向所述id的热释红外打猎相机发送联机请求;
22.热释红外打猎相机根据联机请求进行认证并通过后与无人机联机,完成无线连接;
23.无人机向联机的热释红外打猎相机发送下载请求,并在该热释红外打猎相机通过请求后,下载和存储该热释红外打猎相机存储的动物视频图像;
24.无人机下载完毕后根据飞行路线自动返航。
25.在一种可能的设计中,s3中所述无人机与热释红外打猎相机之间建立近距离无线连接。
26.在一种可能的设计中,所述距离无线连接为wifi无线连接、蓝牙无线连接和zigbee通无线连接中的一种。
27.上述第二方面中的各个方面以及各个方面可能达到的技术效果参照上述针对第一方面或者第一方面中的各种可能方案可以达到的技术效果说明,这里不再重复赘述。
附图说明
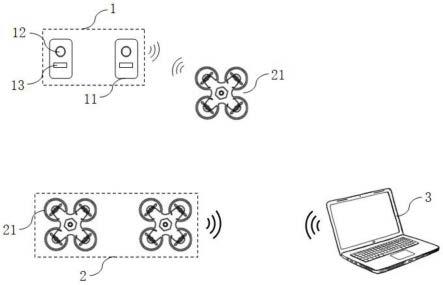
28.图1是本发明所述的一种无人机读取图像的热释红外打猎相机系统实施例的结构原理示意框图;
29.图2是本发明所述的一种无人机读取图像的热释红外打猎相机系统的控制方法的流程示意图;
30.图3是本发明所述的一种无人机读取图像的热释红外打猎相机系统的控制方法中
执行飞行任务指令的流程示意图。
31.图中:1、热释红外打猎相机子系统;11、热释红外打猎相机;12、摄像头;13、位于热释红外传感器组件;2、无人机子系统;21、无人机;3、控制器。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
33.参见图1,本发明实施例所述无人机读取图像的热释红外打猎相机系统,包括有热释红外打猎相机子系统1、无人机子系统2和控制器3。
34.其中,所述热释红外打猎相机子系统1包括分布设置在野外的多个热释红外打猎相机11,所述热释红外打猎相机11主要用于拍摄、存储动物的视频图像,具体地,所述热释红外打猎相机11包括有摄像头12、热释红外传感器组件13、存储器和电源(图中未表示出来),以及用于与无人机通讯连接的第三无线通讯模块(图中未表示出来)。
35.在一种可能实施的方式中,所述摄像头12位于热释红外传感器组件13的上方,而且摄像头12和热释红外传感器组件13位于热释红外打猎相机11正面的中线上;所述热释红外传感器组件13由热释红外传感器和菲涅尔透镜组成,且所述菲涅尔透镜位于热释红外传感器的正前方,所述电源可以是普通电池或充电电池,所述存储器优选sd卡或tf卡。
36.所述无人机子系统2包括一台以上无人机21,用于接收飞行任务指令以及一台以上无人机21根据飞行任务指令飞行至指定位置与指定的热释红外打猎相机11建立连接、下载和存储动物的视频图像,下载完毕后返航。
37.具体地,所述飞行任务指令至少包含飞行路线、热释红外打猎相机的id、联机请求指令和下载请求指令,一台以上无人机21在接收到飞行任务指令后解析出飞行路线、热释红外打猎相机的id、联机请求指令和下载请求指令,并按照飞行路线自动导航飞行至指定位置,并向指定id的热释红外打猎相机11发出联机请求指令、建立连接,再向该指定id的热释红外打猎相机11发出下载请求指令,完成动物视频图像的下载和存储,之后执照飞行路线自动导航返航。为此,该无人机21还设置有自动导航系统,所述自动导航系统为市面上现有无人机导航系统,比如:北京北斗星通定位科技有限公司的诺瓦泰系列novatel无人机组合导航/gnss/ins无人机组合导航,西安精准测控有限责任公司的无人机导航系统,属于现有技术,在此不再详细赘述。
38.在一种可能实施的方式中,所述无人机21设置有控制芯片、用于与热释红外打猎相机无线连接的第一无线通讯模块、用于与控制器无线连接的第二无线通讯模块,以及用于存储下载的动物视频图像的存储器(所述第一无线通讯模块、第二无线通讯模块、存储器均和控制芯片在图中均未表示出来,且所述存储器优选sd卡或tf卡),所述第一无线通讯模块、第二无线通讯模块和存储器均与控制芯片连接,所述第一无线通讯模块热与释红外打猎相机的第三无线通讯模块相匹配,而且所述第一无线通讯模块和第三无线通讯模块为近距离无线通讯模块,优选为wifi通讯模块、蓝牙通讯模块和zigbee通讯模块中的一种。
39.所述控制器3用于接收(用户)操作指令,根据操作指令形成飞行任务指令发送至无人机子系统;所述控制器3可以是服务器、笔记本电脑、平板电脑、智能手机中的一种或多
种组合。
40.而且,所述热释红外打猎相机11和无人机21均具有唯一性id,所述控制器3存储有所述热释红外打猎相机11和无人机21的id信息。
41.本发明所述无人机读取图像的热释红外打猎相机系统使用时,即可通过操作控制器3控制无人机11到野外指定位置下载指定热释红外打猎相机11拍摄的动物视频图像,具体操作方法如图2所示,包括:
42.步骤s1.接收用户操作指令:具体可以为,用户在控制器3上操作输入无人机的id信息和热释红外打猎相机的id信息,其中输入的无人机id信息和热释红外打猎相机的id信息可以是一个,也可以是多个。
43.步骤s2.生成飞行任务指令:根据用户操作指令生成无人机的飞行任务指令,并发达至无人机子系统;具体可以为,控制器3根据用户输入的热释红外打猎相机id信息调取该热释红外打猎相机的位置信息,并自动生成飞行路线,并至少与热释红外打猎相机的id、联机请求指令和下载请求指令一并打包形成飞行任务指令,一并发送至指定id的无人机。
44.步骤s3.执行飞行任务指令:根据飞行任务指令安排一台以上无人机飞行至指定位置,并与指定的热释红外打猎相机建立连接、下载和存储动物的视频图像,下载完毕后返航;具体如图3所示,包括:
45.步骤s3-1.从飞行任务指令解析出飞行路线、热释红外打猎相机的id、联机请求指令和下载请求指令;
46.步骤s3-2.无人机根据飞行路线自动导航飞行至指定位置(与热释红外打猎相机的距离在75m以内),并向所述id的热释红外打猎相机发送联机请求;
47.步骤s3-3.热释红外打猎相机根据联机请求进行认证并通过后与无人机联机,完成无线连接,无人机与热释红外打猎相机之间建立近距离无线连接,优选wifi无线连接、蓝牙无线连接和zigbee通无线连接中的一种;
48.步骤s3-4.无人机向联机的热释红外打猎相机发送下载请求,并在该热释红外打猎相机通过请求后,下载和存储该热释红外打猎相机存储的动物视频图像;其中,上述联机请求指令和下载请求指令可以通过采用ask通讯方式的433mhz以及其它频段(即遥控指令)来实现与热释红外打猎相机通讯;
49.步骤s3-5.无人机下载完毕后根据飞行路线自动返航。
50.本发明所述的无人机读取图像的热释红外打猎相机系统及控制方法,通过利用无人机飞到安装在野外的热释红外打猎相机附近,并下载热释红外打猎相机上存储的视频图像后返航,实现了无人机远程飞行后读取野外的热释红外打猎相机拍摄的视频图像,完全不受是否具有基站信号的环境条件限制,适用性强,且无需用户亲身到达打猎相机的安装位置,操作使用简单、方便、快捷
51.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1