一种多源遥测位控指令的实时优选方法与流程
1.本发明属于航天测控数据处理领域,涉及测量船多源遥测位控指令参数的实时处理,可用于多源遥测情形下位控指令数据帧的实时优选。
背景技术:
2.在进行飞行器海基测控任务时,测量船中心机系统会收到来自多源遥测数据的位控指令数据帧,这些数据帧是由不同的测控设备接收飞行器遥测原码中的位控指令参数实时解算而来,为了便于实时监视各位控指令参数的解算情况,测量船中心机系统需要基于这些多源遥测位控指令数据帧进行优选融合,实时生成唯一的遥测位控指令数据帧。
3.面对多数据源的位控指令数据帧,传统的处理方法仅依据设备的跟踪性能,在飞行器飞行过程中,根据飞行相对时实时选择特定数据源的位控指令数据帧并发出,用于监视显示。该方法在每个时间段仅能依赖一种遥测数据源,未能充分利用多源遥测数据的优势,在当前主跟踪设备跟踪状况不佳时,会存在位控指令参数解算异常的现象;特别的,由于遥测参数解算中位控指令的特殊性,单一数据源的位控指令数据帧中很难包括飞行器整个测控弧段中所有位控指令参数的解算情况。
4.为了更好的满足岗位人员对飞行器内部各传感器参数及飞行势态的实时判断,我们将这些遥测数据源根据设备跟踪性能,构建了分时的位控指令数据帧优先级列表,然后将多源遥测的位控指令数据帧采用时间驱动的方式进行优选融合。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种多源遥测位控指令数据帧的实时优选方法,该方法针对多源遥测的位控指令数据帧,构建了优选融合方法,确保了优选融合后位控指令数据帧的实时性、完备性、准确性。
6.本发明解决上述问题所采用的技术方案为:一种多源遥测位控指令数据帧的实时优选方法,采用了时间驱动的方式,具体包括以下步骤:
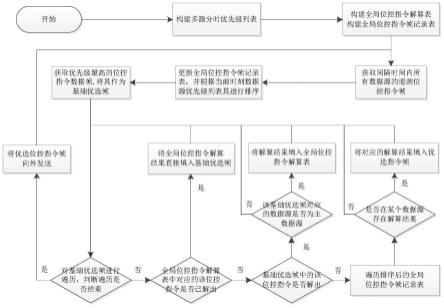
7.步骤a、生成整个测控飞行时段的多数据源分时优先级列表;构建全局位控指令解算表,该表用于记录确定性的位控指令解算结果,即该位控指令发生时,其数据源为当时的数据源优先级列表中的主数据源(数据源优先级列表中的第一个);构建全局位控指令数据帧记录表,每种数据源对应一个表,用于记录每种数据源遥测位控指令帧的最新一帧。
8.步骤b、设定优选间隔,获取该间隔时间内所有数据源的遥测位控指令数据帧,若该时间段内,未收到任何数据源的遥测位控指令数据帧,则转至步骤b继续。
9.步骤c、根据步骤b中接收到的遥测位控指令数据帧的数据源,更新对应的全局位控指令数据帧记录表。
10.步骤d、获取当前时刻遥测数据源优先级列表,按照数据源优先级对全局位控指令数据帧记录表进行排序,并获取优先级最高的位控指令数据帧,将其作为基础优选帧。
11.步骤e、对上述的基础优选帧中位控指令进行遍历。
12.步骤f、对于基础优选帧中的某一位控指令,若全局位控指令解算表中对应的该位控指令已解出,则用该解算结果更新基础优选帧中的该指令,转到步骤e继续遍历。
13.步骤g、对于基础优选帧中的某一位控指令,若其已解出且其数据源为当前优先级列表中的主数据源,则将该解算结果填入全局位控指令解算表,转到步骤e继续遍历。
14.步骤h、对于基础优选帧中的某一位控指令,若其未解出,则遍历排序后的全局位控指令帧记录表,若某个数据源对应的全局位控指令帧中该指令已解出,则用该解算结果更新基础优选帧中的该指令,并结束遍历,转到步骤e继续遍历。
15.步骤i、遍历步骤e结束后,将上述更新后的基础优选帧向外发送,并转到步骤b。
16.与现有技术相比,本发明的有意效果:
17.(1)本发明预先构建了遥测多源数据分时优先级列表,在收到多源遥测位控指令数据帧时,按照分时优先级列表对遥测位控指令数据进行优选,使得优选融合后的位控指令能反映整个测控弧段中所有位控指令参数的解算情况,确保了生成的位控指令数据帧的实时性、完备性。
18.(2)本发明对多源遥测位控指令数据帧进行优选时,区分了分时优先级列表中的主数据源与非主数据源,按照主数据源优先的准则对多源遥测位控指令进行融合,确保了生成的遥测位控指令帧的准确性。
附图说明
19.图1为本发明所述的多源遥测位控指令帧优选流程图。
具体实施方式
20.以下结合附图实施例对本发明作进一步详细描述。
21.本技术实施例提供用于飞行器测控的多源遥测位控指令数据帧实时优选方法。该方法采用时间驱动的方式实时接收多数据源位控指令数据帧,经过处理后得到优选融合的位控指令帧并实时向外发送。
22.本发明提供的优选方法,需要定义多数据源分时优先级列表,以及遥测位控指令数据帧格式等信息。具体实施方式如下:
23.(1)定义多数据源分时优先级列表,假定某次飞行器测控任务中存在s1、s2、s3、s4等四个测控站,它们均能完成该飞行器遥测信号的接收以及位控指令帧的解算,根据这四个测控站的跟踪性能,按照飞行器起飞后的相对时,可构建如下表1所示的分时优先级列表:
24.表1多数据源分时优先级列表
[0025][0026]
(2)定义遥测位控指令数据帧格式,如表2所示,遥测位控指令帧包含数据时标头以及一系列的位控指令,每个位控指令解算结果均采用四字节无符号整数描述,当位控指令参数未解算时,对应位置填充0xffffffff。
[0027]
表2位控指令数据帧格式
[0028]
序号名称符号数据类型量纲1采样时刻t四字节无符号整数0.1毫秒2位控指令1wkzl1四字节无符号整数0.1毫秒3位控指令2wkzl2四字节无符号整数0.1毫秒4
……………………
5位控指令nwkzln四字节无符号整数0.1毫秒
[0029]
(3)本发明实施步骤中的优选间隔δ可理解为优选位控指令数据帧的生成间隔,一般情况下,可将其设定为:δ=1s。
[0030]
(4)本发明的全局位控指令解算表格式与位控指令数据帧格式相同,只是不包含采样时刻,用于全局性的记录位控指令的解算情况。在初始状态下,全局位控指令解算表中的所有位控指令均处于未解算状态。
[0031]
(5)在接下来的某一个优选时间间隔δ内,即步骤b的循环中,对任意一个位控指令的优选融合存在以下两种情形:
[0032]
若全局位控指令解算表中该位控指令已解算出,则跳过后续的循环,直接以该解算值作为该位控指令的最终解算结果。
[0033]
若全局位控指令解算表中该位控指令处于未解算状态,则进行步骤e的循环,在该循环中,若该位控指令发生,以该解算值作为该位控指令的当前帧解算结果;若该位控指令未发生,以初始值作为该位控指令当前帧的解算结果。若该位控指令发生,且其数据源为当时的数据源优先级列表中的主数据源,则将该位控指令的解算结果填入全局位控指令解算表。
[0034]
(6)可以看到,在全局位控指令解算表中某位控指令处于未解算状态之前,生成的位控指令优选融合帧中该位控指令的解算结果是可能发生变化的,这是由于算法中分时数据源优先级列表中主数据源的特殊性决定的,也正是本发明优越性的体现。当位控指令获
得确定性的解算结果后,记录在全局位控指令解算表中,后续生成的位控指令优选融合帧中该位控指令的解算结果不再变化。
[0035]
除上述实施例外,本发明还包括有其他实施方式,凡采用等同变换或者等效替换方式形成的技术方案,均应落入本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1