一种用于非接触式人体姿态获取的光学处理装置的制作方法
1.本发明涉及一种人体姿态获取的光学处理装置,尤其涉及一种用于非接触式人体姿态获取的光学处理装置。
背景技术:
2.在一些高科技产品体验场所,经常会有一些新型科技电子产品供人体验,例如,比较常见的一些具有拍摄功能的产品,人们在体验这些产品时,产品可以通过摄像头抓拍人体的一些动作,通过光学处理后,使照片出现在lcd显示屏,供人们观看娱乐,这类具有拍摄功能的产品大部分称为光学处理装置。
3.由于现有的大部分光学处理装置构造还是比较简单,导致大部分功能并不齐全,使得人们在进行体验时,体验的感觉较差,例如人们在体验这些光学处理装置时,由于这类产品本身体积较大,容易对灯光进行遮挡,导致产品在对人体抓拍时,拍摄出的照片较暗,而且产品在经过多人体验后,产品上容易残留有大量的灰尘,由于产品里的缝隙较小,使得人们在清理时,比较麻烦。
4.因此,需要设计一种具有补光功能而且方便清理灰尘的用于非接触式人体姿态获取的光学处理装置。
技术实现要素:
5.为了克服现在大部分的光学处理装置构造简单、功能并不齐全、拍摄出的照片较暗和灰尘难以清理的缺点,本发明提供一种具有补光功能而且方便清理灰尘的用于非接触式人体姿态获取的光学处理装置。
6.本发明通过以下技术途径实现:
7.一种用于非接触式人体姿态获取的光学处理装置,包括有底板、支撑架、lcd显示屏、支撑座、第一压力传感器、第一连接块、第一限位杆、电动滑轨、第二压力传感器、摄像头、把手、控制板、控制开关、转换开关、升降机构、防护机构、补光机构和清扫机构,底板顶部左右两侧均设有支撑架,支撑架内侧后部之间设有lcd显示屏,底板顶部中间放置有支撑座,支撑座顶部设有第一压力传感器,支撑座左右两侧的中部均设有第一连接块,右侧的第一连接块顶部左侧设有第一限位杆,第一限位杆下侧滑动式设有电动滑轨,电动滑轨顶部间隔设有三个第二压力传感器,电动滑轨的滑块右侧转动式设有用于对人体进行拍摄的摄像头,摄像头左侧设有把手,右侧的支撑架右侧上部前侧设有控制板,控制板右侧前部设有控制开关,控制板右侧后部设有转换开关,支撑架前侧上部设有用于将支撑座升高的升降机构,支撑座顶部设有用于对人体进行保护的防护机构,底板顶部设有用于对人体进行补光的补光机构,底板顶部设有用于对灰尘进行清理的清扫机构。
8.作为更进一步的优选方案,升降机构包括有电动推杆、第二连接块、第一距离传感器和风扇,支撑架前侧上部均设有电动推杆,电动推杆的伸缩杆均与同侧的第一连接块连接,电动推杆上侧之间设有第二连接块,第二连接块底部中间设有第一距离传感器,支撑架
上部中间均设有风扇。
9.作为更进一步的优选方案,防护机构包括有第二限位杆、防护环、回力弹簧、电磁铁和第二距离传感器,支撑座顶部左右两侧均设有第二限位杆,第二限位杆下侧之间滑动式设有防护环,支撑座顶部前侧设有电磁铁,电磁铁与防护环接触,防护环底部左右两侧与支撑座之间均设有回力弹簧,回力弹簧均绕在同侧的第二限位杆上,右侧的第一连接块中部设有第二距离传感器。
10.作为更进一步的优选方案,补光机构包括有限位块、第一滑板、补光灯和复位弹簧,底板顶部左右两侧均设有限位块,限位块下部均滑动式设有第一滑板,第一连接块向上移动时会与同侧的第一滑板接触,第一滑板上均设有补光灯,第一滑板顶部前后两侧与同侧的限位块之间均设有复位弹簧。
11.作为更进一步的优选方案,清扫机构包括有限位环、转动轮、压缩弹簧和清洗块,底板顶部后侧中部设有限位环,限位环内部右侧滑动式设有转动轮,转动轮后侧右部与限位环内部左前侧之间设有压缩弹簧,转动轮左侧设有清洗块,清洗块与底板顶部接触。
12.作为更进一步的优选方案,还包括有用于带动转动轮移动的转动机构,转动机构包括有螺旋轴、转动环、伸缩长杆和伸缩弹簧,左侧的第一连接块顶部右侧转动式设有螺旋轴,螺旋轴与电动滑轨螺纹式连接,螺旋轴顶部设有转动环,电动滑轨上的滑块底部设有伸缩长杆,伸缩长杆与底板顶部接触,伸缩长杆在向右移动时会与转动轮接触,伸缩长杆内部设有两个伸缩弹簧。
13.作为更进一步的优选方案,还包括有用于将人体遮挡的遮盖机构,遮盖机构包括有支撑杆、第三连接块、遮挡布、橡胶环、限位架、第二滑板、橡胶块、第一橡胶轮、转动轴和第二橡胶轮,电动推杆顶部均设有支撑杆,支撑杆上侧均设有第三连接块,第三连接块底部外侧均设有遮挡布,支撑杆上侧均滑动式设有橡胶环,橡胶环位于第三连接块的内侧,橡胶环前侧均与同侧的遮挡布连接,支撑架内顶部均设有限位架,限位架下侧均与同侧的第一滑板滑动式连接,第一滑板外侧后部均转动式设有第二滑板,限位架上部后侧均滑动式设有橡胶块,第二滑板上部均与同侧的橡胶块转动式连接,支撑架顶部前侧均转动式设有转动轴,转动轴下侧均设有第一橡胶轮,第一橡胶轮均与同侧的橡胶块接触,转动轴上侧均设有第二橡胶轮,第二橡胶轮均与同侧的橡胶环接触。
14.作为更进一步的优选方案,控制板内包括有开关电源、控制模块和电源模块,开关电源为整个用于非接触式人体姿态获取的光学处理装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一压力传感器、第二压力传感器、第一距离传感器、第二距离传感器、补光灯、lcd显示屏、控制开关和转换开关均与控制模块通过电性连接,电动滑轨、摄像头、电动推杆、风扇和电磁铁均与控制模块通过外围电路连接。
15.与现有技术相比,本发明其显著进步在于:
16.1、本发明在人们进入支撑座上,在第一压力传感器的作用下,能够使补光灯开始工作,从而使补光灯将人体照亮,进而使摄像头对人体拍摄出的图片更加清晰。
17.2、本发明在风扇开始工作时,能够将人体上的灰尘吹落,在人们离开支撑座后,可以拉动清洗块移动,从而对底板顶部进行清扫,进而方便人们对灰尘进行清理。
18.3、本发明在伸缩长杆越过转动轮后,当电动滑轨的滑块向左移动复位时,能够自
动带动转动轮和清洗块向左移动,从而自动对底板顶部进行清扫,方便人们操作。
19.4、本发明在第一滑板向上移动时,能够使橡胶环向前移动,从而将遮挡布展开,使遮挡布对支撑座上的人体进行遮挡,从而方便人们对隐私进行保护。
附图说明
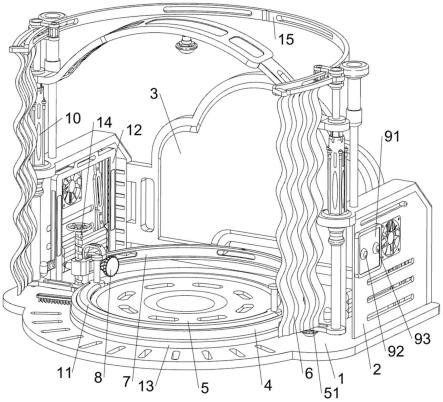
20.图1为本发明的立体结构示意图。
21.图2为本发明的第一种部分立体结构示意图。
22.图3为本发明的第二种部分立体结构示意图。
23.图4为本发明的升降机构立体结构示意图。
24.图5为本发明的防护机构立体结构示意图。
25.图6为本发明的防护机构剖视图。
26.图7为本发明的补光机构立体结构示意图。
27.图8为本发明的补光机构剖视图。
28.图9为本发明的清扫机构剖视图。
29.图10为本发明的转动机构立体结构示意图。
30.图11为本发明的转动机构剖视图。
31.图12为本发明的遮盖机构立体结构示意图。
32.图13为本发明的遮盖机构局部剖视图。
33.图14为本发明的电路框图。
34.图15为本发明的电路原理图。
35.图中标号名称:1-底板,2-支撑架,3-lcd显示屏,4-支撑座,5-第一压力传感器,51-第一连接块,6-第一限位杆,7-电动滑轨,71-第二压力传感器,8-摄像头,9-把手,91-控制板,92-控制开关,93-转换开关,10-升降机构,100-电动推杆,101-第二连接块,102-第一距离传感器,103-风扇,11-防护机构,110-第二限位杆,111-防护环,112-回力弹簧,113-电磁铁,114-第二距离传感器,12-补光机构,120-限位块,121-第一滑板,122-补光灯,123-复位弹簧,13-清扫机构,130-限位环,131-转动轮,132-压缩弹簧,133-清洗块,14-转动机构,140-螺旋轴,141-转动环,142-伸缩长杆,143-伸缩弹簧,15-遮盖机构,150-支撑杆,151-第三连接块,152-遮挡布,153-橡胶环,154-限位架,155-第二滑板,156-橡胶块,157-第一橡胶轮,158-转动轴,159-第二橡胶轮。
具体实施方式
36.以下结合说明书附图进一步阐述本发明,并结合说明书附图给出本发明的实施例。
37.实施例1
38.一种用于非接触式人体姿态获取的光学处理装置,包括有底板1、支撑架2、lcd显示屏3、支撑座4、第一压力传感器5、第一连接块51、第一限位杆6、电动滑轨7、第二压力传感器71、摄像头8、把手9、控制板91、控制开关92、转换开关93、升降机构10、防护机构11、补光机构12和清扫机构13,参看图1-图9所示,底板1顶部左右两侧均设有支撑架2,支撑架2内侧后部之间设有lcd显示屏3,底板1顶部中间放置有支撑座4,支撑座4顶部设有第一压力传感
器5,支撑座4左右两侧的中部均设有第一连接块51,右侧的第一连接块51顶部左侧设有第一限位杆6,第一限位杆6下侧滑动式设有电动滑轨7,电动滑轨7顶部间隔设有三个第二压力传感器71,电动滑轨7的滑块移动能够与第二压力传感器71接触,电动滑轨7的滑块右侧转动式设有摄像头8,摄像头8开启后,能够对人体进行拍摄,摄像头8左侧设有把手9,右侧的支撑架2右侧上部前侧设有控制板91,控制板91右侧前部设有控制开关92,控制板91右侧后部设有转换开关93,支撑架2前侧上部设有升降机构10,支撑座4顶部设有防护机构11,底板1顶部设有补光机构12,底板1顶部设有清扫机构13。
39.升降机构10包括有电动推杆100、第二连接块101、第一距离传感器102和风扇103,参看图4所示,支撑架2前侧上部均栓接有电动推杆100,电动推杆100开启后,能够使支撑座4向上移动,电动推杆100的伸缩杆均与同侧的第一连接块51连接,电动推杆100上侧之间设有第二连接块101,第二连接块101底部中间设有第一距离传感器102,支撑架2上部中间均设有风扇103。
40.防护机构11包括有第二限位杆110、防护环111、回力弹簧112、电磁铁113和第二距离传感器114,参看图5和图6所示,支撑座4顶部左右两侧均焊接有第二限位杆110,第二限位杆110下侧之间滑动式设有防护环111,防护环111向上移动后,能够对支撑座4上的人体进行保护,支撑座4顶部前侧设有电磁铁113,电磁铁113与防护环111接触,防护环111底部左右两侧与支撑座4之间均设有回力弹簧112,回力弹簧112均绕在同侧的第二限位杆110上,右侧的第一连接块51中部设有第二距离传感器114。
41.补光机构12包括有限位块120、第一滑板121、补光灯122和复位弹簧123,参看图7和图8所示,底板1顶部左右两侧均焊接有限位块120,限位块120下部均滑动式设有第一滑板121,第一连接块51向上移动时会与同侧的第一滑板121接触,第一滑板121上均设有补光灯122,补光灯122开启时,能够将人体照亮,从而对人体补光,第一滑板121顶部前后两侧与同侧的限位块120之间均设有复位弹簧123。
42.清扫机构13包括有限位环130、转动轮131、压缩弹簧132和清洗块133,参看图9所示,底板1顶部后侧中部焊接有限位环130,限位环130内部右侧滑动式设有转动轮131,转动轮131后侧右部与限位环130内部左前侧之间设有压缩弹簧132,转动轮131左侧设有清洗块133,清洗块133在移动时,能够对底板1顶部的灰尘进行清扫,清洗块133与底板1顶部接触。
43.当人们需要使用该用于非接触式人体姿态获取的光学处理装置时,首先按动电源总开关,使该用于非接触式人体姿态获取的光学处理装置通电,第一压力传感器5、第二压力传感器71、第一距离传感器102和第二距离传感器114开始工作,同时控制模块控制lcd显示屏3开始工作,然后人们即可进入支撑座4上,使人体与第一压力传感器5接触,从而对第一压力传感器5进行挤压,当第一压力传感器5感应到压力大于最大预设值时,第一压力传感器5发出信号,控制模块接收到信号后控制补光灯122开始工作,使补光灯122将人体照亮,同时控制模块控制风扇103开始工作,使风扇103对人体进行吹风,从而将人体上的灰尘吹落,然后按动一次控制开关92,控制开关92发出信号,控制模块接收到信号后控制电动推杆100开始工作,使电动推杆100的伸缩杆缩短,从而带动第一连接块51、支撑座4、第二距离传感器114和电动滑轨7向上移动,当第二距离传感器114感应到与底板1之间的距离大于最大预设值时,第二距离传感器114发出信号,控制模块接收到信号后控制电磁铁113通电,使电磁铁113与防护环111之间产生排斥力,从而使防护环111向上移动,回力弹簧112拉伸,进
而使防护环111对支撑座4上的人们进行保护,当第一连接块51与第一滑板121接触时,第一连接块51带动第一滑板121向上移动,复位弹簧123压缩,从而带动补光灯122向上移动,使补光灯122持续对准人体进行照亮,当第一距离传感器102感应到与人体之间的距离小于预设值时,第一距离传感器102发出信号,控制模块接收到信号后控制电动推杆100停止工作,然后用手握住把手9,再通过转动把手9,把手9带动摄像头8转动,从而对摄像头8对准的角度进行调节,调节好之后,松开把手9,然后按动一次转换开关93,转换开关93发出信号,控制模块接收到信号后控制电动滑轨7工作10秒,使电动滑轨7的滑块向右移动,从而带动摄像头8向右移动,当电动滑轨7的滑块与第二压力传感器71接触时,电动滑轨7的滑块会对第二压力传感器71进行挤压,当第二压力传感器71感应到压力大于最大预设值时,第二压力传感器71发出信号,控制模块接收到信号后控制摄像头8开始工作,使摄像头8对人体进行拍摄,拍摄的图像会在lcd显示屏3上进行显示,使人们可以通过观看lcd显示屏3,从而知晓摄像头8拍摄的内容,进而对人体姿态进行获取,当电动滑轨7的滑块与第二压力传感器71分离时,电动滑轨7的滑块不再对第二压力传感器71进行挤压,当第二压力传感器71感应到压力小于最小预设值时,第二压力传感器71发出信号,控制模块接收到信号后控制摄像头8停止工作,10秒后,控制模块控制电动滑轨7停止工作,然后再次按动一次转换开关93,转换开关93发出信号,控制模块接收到信号后控制电动滑轨7工作10秒,使电动滑轨7的滑块向左移动复位,从而带动摄像头8向左移动复位,10秒后,控制模块控制电动滑轨7停止工作,然后再次按动一次控制开关92,控制开关92发出信号,控制模块接收到信号后控制电动推杆100开始工作,使电动推杆100的伸缩杆伸长,从而带动第一连接块51、支撑座4、第二距离传感器114和电动滑轨7向下移动复位,当第一连接块51与第一滑板121分离时,复位弹簧123恢复原状,复位弹簧123带动第一滑板121向下移动复位,从而带动补光灯122向下移动复位,当第二距离传感器114感应到与底板1之间的距离小于最小预设值时,第二距离传感器114发出信号,控制模块接收到信号后控制电磁铁113断电,使电磁铁113与防护环111之间不再产生排斥力,此时回力弹簧112恢复原状,回力弹簧112带动防护环111向下移动复位,同时控制模块控制电动推杆100停止工作,然后即可从支撑座4上离开,当第一压力传感器5感应到压力小于最小预设值时,第一压力传感器5发出信号,控制模块接收到信号后控制补光灯122停止工作,同时控制模块控制风扇103停止工作,然后拉动清洗块133向右移动,从而带动转动轮131向右移动,压缩弹簧132压缩,从而对底板1顶部进行清扫,当底板1顶部清扫干净后,松开清洗块133,压缩弹簧132恢复原状,压缩弹簧132带动转动轮131和清洗块133向左移动复位,当人们不再需要使用该用于非接触式人体姿态获取的光学处理装置时,再次按动电源总开关,使该用于非接触式人体姿态获取的光学处理装置断电,第一压力传感器5、第二压力传感器71、第一距离传感器102和第二距离传感器114停止工作,同时lcd显示屏3停止工作。
44.实施例2
45.在实施例1的基础之上,还包括有转动机构14,转动机构14包括有螺旋轴140、转动环141、伸缩长杆142和伸缩弹簧143,参看图1、图10和图11所示,左侧的第一连接块51顶部右侧转动式设有螺旋轴140,螺旋轴140与电动滑轨7螺纹式连接,螺旋轴140顶部设有转动环141,电动滑轨7上的滑块底部设有伸缩长杆142,伸缩长杆142越过转动轮131后,在电动滑轨7的滑块向左移动复位时,能够使转动轮131向左移动,伸缩长杆142与底板1顶部接触,
伸缩长杆142在向右移动时会与转动轮131接触,伸缩长杆142内部设有两个伸缩弹簧143。
46.初始状态下,伸缩弹簧143为压缩状态,当电动滑轨7向上移动时,此时伸缩弹簧143恢复原状,伸缩弹簧143带动伸缩长杆142伸长,使伸缩长杆142一直与底板1顶部接触,当电动滑轨7的滑块向右移动时,从而带动伸缩长杆142向右移动,当伸缩长杆142与转动轮131接触时,转动轮131会对伸缩长杆142进行挤压,使伸缩长杆142收缩,伸缩弹簧143压缩,当伸缩长杆142越过转动轮131后,伸缩弹簧143恢复原状,使伸缩长杆142伸长,当电动滑轨7的滑块向左移动复位时,从而带动伸缩长杆142向左移动复位,使伸缩长杆142带动转动轮131向左移动,压缩弹簧132压缩,从而带动清洗块133向左移动,当人们需要再次按动一次控制开关92前,可以握住转动环141转动,转动环141带动螺旋轴140转动,使电动滑轨7向上移动,从而带动伸缩长杆142向上移动,当伸缩长杆142与转动轮131分离时,压缩弹簧132恢复原状,压缩弹簧132带动转动轮131和清洗块133向右移动复位,然后将转动环141反转,转动环141带动螺旋轴140反转,使电动滑轨7向下移动复位,从而带动伸缩长杆142向下移动复位,然后松开转动环141即可。
47.还包括有遮盖机构15,遮盖机构15包括有支撑杆150、第三连接块151、遮挡布152、橡胶环153、限位架154、第二滑板155、橡胶块156、第一橡胶轮157、转动轴158和第二橡胶轮159,参看图1、图12和图13所示,电动推杆100顶部均设有支撑杆150,支撑杆150上侧均焊接有第三连接块151,第三连接块151底部外侧均设有遮挡布152,遮挡布152在展开后,能够将支撑座4上的人体进行遮挡,支撑杆150上侧均滑动式设有橡胶环153,橡胶环153位于第三连接块151的内侧,橡胶环153前侧均与同侧的遮挡布152连接,支撑架2内顶部均设有限位架154,限位架154下侧均与同侧的第一滑板121滑动式连接,第一滑板121外侧后部均转动式设有第二滑板155,限位架154上部后侧均滑动式设有橡胶块156,第二滑板155上部均与同侧的橡胶块156转动式连接,支撑架2顶部前侧均转动式设有转动轴158,转动轴158下侧均设有第一橡胶轮157,第一橡胶轮157均与同侧的橡胶块156接触,转动轴158上侧均设有第二橡胶轮159,第二橡胶轮159均与同侧的橡胶环153接触。
48.当第一滑板121向上移动时,第一滑板121会通过第二滑板155带动橡胶块156向前移动,使橡胶块156在摩擦力的作用下带动第一橡胶轮157转动,从而带动转动轴158和第二橡胶轮159转动,进而使第二橡胶轮159在摩擦力的作用下带动橡胶环153向前移动,从而将遮挡布152展开,使遮挡布152对支撑座4上的人体进行遮挡,当第一滑板121向下移动复位时,第一滑板121会通过第二滑板155带动橡胶块156向后移动复位,使橡胶块156带动第一橡胶轮157反转,从而带动转动轴158和第二橡胶轮159反转,进而使第二橡胶轮159带动橡胶环153向后移动复位,从而将遮挡布152收起。
49.控制板91内包括有开关电源、控制模块和电源模块,参看图14和图15所示,开关电源为整个用于非接触式人体姿态获取的光学处理装置供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一压力传感器5、第二压力传感器71、第一距离传感器102、第二距离传感器114、补光灯122、lcd显示屏3、控制开关92和转换开关93均与控制模块通过电性连接,电动滑轨7、摄像头8、电动推杆100、风扇103和电磁铁113均与控制模块通过外围电路连接。
50.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和
调整,均属本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1