基于车联网的道路交通数据获取系统的制作方法
1.本发明涉及道路交通数据获取技术领域,具体为基于车联网的道路交通数据获取系统。
背景技术:
2.交通事故、交通拥挤以及由此引发的能源浪费和环境污染等问题,已经成为世界各国大中城市所面临的共同顽疾,导致了严重的后果。在我国,交通事故所导致的日均死亡人数相当于一架普通客机的载客量,远高于美国、日本等发达国家。突发交通事件不仅会严重威胁着人们生命的安全,而且还会造成大量的交通拥挤和经济损失,由此可见交通事件和交通拥挤对道路交通的安全与效率具有重要影响,对于道路交通数据的获取以及道路交通状况信息的及时了解十分有必要。鉴于此,我们提出基于车联网的道路交通数据获取系统。
技术实现要素:
3.本发明的目的在于提供基于车联网的道路交通数据获取系统,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.基于车联网的道路交通数据获取系统,包括如下步骤:
6.步骤一:各类交通初步数据的获取与预处理:
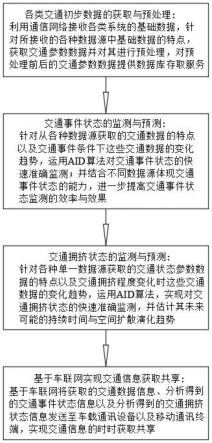
7.利用通信网络接收各类系统的基础数据,针对所接收的各种数据源中基础数据的特点,获取交通参数数据并对其进行预处理,对预处理前后的交通参数数据提供数据库存取服务;
8.步骤二:交通事件状态的监测与预测:
9.针对从各种数据源获取的交通数据的特点以及交通事件条件下这些交通数据的变化趋势,运用aid算法对交通事件状态的快速准确监测;并结合不同数据源体现交通事件状态的能力,进一步提高交通事件状态监测的效率与效果;
10.步骤三:交通拥挤状态的监测与预测:
11.针对各种单一数据源获取的交通状态参数数据的特点以及交通拥挤程度变化时这些交通数据的变化趋势,运用aid算法,实现对交通拥挤状态的快速准确监测,并估计其未来可能的持续时间与空间扩散演化趋势。
12.步骤四:基于车联网实现交通信息获取共享:
13.基于车联网将获取的交通数据信息、分析得到的交通事件状态信息以及分析得到的交通拥挤状态信息发送至车载通讯设备以及移动通讯终端,实现交通信息的时时获取共享。
14.作为本发明的进一步优选,步骤一中的各类系统数据包括车辆检测器数据、感应式交通控制系统数据、道路收费系统数据以及车辆跟踪定位系统数据。
15.作为本发明的进一步优选,车辆检测器数据主要来源于布设于高速公路、快速路、普通公路的连续流交通设施,其获取的数据目前主要服务于道路交通状态的监测与预测;
16.感应式交通控制系统数据主要来源于布设于城市主次干道交叉口附近的车辆检测器,其获取的数据目前主要服务于实时自适应信号控制;
17.道路收费系统数据主要来源于高速公路收费系统,其获取的数据目前主要服务于高速公路收费管理;
18.车辆跟踪定位系统数据主要来源于车辆跟踪调度系统,其获取的数据目前主要服务于对城市内的出租车、私家车、公交车、勤务车以及城市之间的物流车、危险品运输车、长途客车的跟踪调度。
19.作为本发明的进一步优选,步骤三中的交通状态参数包括但不限于:交通流量、地点速度、时间占有率、车头时距、区间速度、行程时间、车辆密度、排队长度。
20.作为本发明的进一步优选,步骤二和步骤三中的aid算法的计算公式为:
[0021][0022][0023][0024]ip
(t)为第t个时间间隔车辆检测器p的交通参数组合变量;
[0025]qp
(t)为第t个时间间隔车辆检测器p的交通流量;
[0026]hp
(t)为第t个时间间隔车辆检测器p的平均车头时距;
[0027]
n为数据分析的时间窗口宽度;
[0028]
和分别为q
p
(t)和h
p
(t)的预测值。
[0029]
作为本发明的进一步优选,数据分析的时间窗口宽度n的取值对交通事件检测效果具有较大影响,n值太大,使得时间窗口内交通数据较为平均,有可能造成交通事件的漏检;n值太小,交通数据的正常波动也可能误检为发生交通事件,在实际应用时,应以获取最佳的交通事件检测效果为原则确定n的取值,一般为5-10。
[0030]
作为本发明的进一步优选,i
p
(t)值在交通事件发生前、交通事件持续过程中以及交通事件处理完毕后的变化具有趋势性,具体表现为:
[0031]
(1)当没有交通事件发生时,车辆检测器获取的交通参数数据一般较为平稳或者具有渐变趋势,各交通参数数据的实测值与预测值通常比较接近,此时i
p
(t)值会在“1”附近波动;
[0032]
(2)在交通事件发生初期,如果其对交通流的运行产生了比较大的影响,车辆检测器获取的交通参数实测值将会产生突变,交通参数预测值则会在一段时间内维持没有发生交通事件时的发展趋势,此时i
p
(t)值将会显著增加并持续远大于“1”,当其取值超过特定的阈值时,则可认为该车辆检测器的上游发生了交通事件;
[0033]
(3)当交通事件处于持续阶段时,尽管交通流的运行处于受干扰状况,但能够通过
事发位置的车辆数已基本趋于稳定,因此下游车辆检测器所获取的交通参数实测值也将逐渐趋于稳定,此时段交通参数预测值会从事件发生初期与实测值差别较大变为接近实测值,i
p
(t)值将会表现为迅速下降直至在“1”附近波动;
[0034]
(4)当交通事件处于结束阶段时,如果交通事件对交通流的影响已基本消除,车辆检测器获取的交通参数实测值将会向反方向发展,交通参数预测值的变化则会经历从维持交通事件持续阶段的发展趋势到逐渐接近其实测值,同样i
p
(t)值的变化将经历从“1”附近开始迅速变小到最终在“1”附近波动,当i
p
(t)取值低于特定的阈值时,可以认为交通事件的影响已经结束。
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
本发明先通过无线网络接收各类系统的基础数据并对其进行预处理,再针对各种数据的变化趋势,运用aid算法对交通事件状态的快速准确监测,同时也可以运用aid算法现对交通拥挤状态的快速准确监测,并估计其未来可能的持续时间与空间扩散演化趋势,通过这种系统方式可以非常准确的获取交通道路交通数据并及时掌握道路详细信息。
附图说明
[0037]
图1为本发明基于车联网的道路交通数据获取系统的整体流程图。
具体实施方式
[0038]
下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
请参阅图1,本发明提供的技术方案:
[0040]
基于车联网的道路交通数据获取系统,包括如下步骤:
[0041]
步骤一:各类交通初步数据的获取与预处理:
[0042]
利用通信网络接收各类系统的基础数据,针对所接收的各种数据源中基础数据的特点,获取交通参数数据并对其进行预处理,对预处理前后的交通参数数据提供数据库存取服务;
[0043]
步骤二:交通事件状态的监测与预测:
[0044]
针对从各种数据源获取的交通数据的特点以及交通事件条件下这些交通数据的变化趋势,运用aid算法对交通事件状态的快速准确监测;并结合不同数据源体现交通事件状态的能力,进一步提高交通事件状态监测的效率与效果;
[0045]
步骤三:交通拥挤状态的监测与预测:
[0046]
针对各种单一数据源获取的交通状态参数数据的特点以及交通拥挤程度变化时这些交通数据的变化趋势,运用aid算法,实现对交通拥挤状态的快速准确监测,并估计其未来可能的持续时间与空间扩散演化趋势。
[0047]
步骤四:基于车联网实现交通信息获取共享:
[0048]
基于车联网将获取的交通数据信息、分析得到的交通事件状态信息以及分析得到的交通拥挤状态信息发送至车载通讯设备以及移动通讯终端,实现交通信息的时时获取共
享。
[0049]
作为本发明的进一步优选,步骤一中的各类系统数据包括车辆检测器数据、感应式交通控制系统数据、道路收费系统数据以及车辆跟踪定位系统数据。
[0050]
作为本发明的进一步优选,车辆检测器数据主要来源于布设于高速公路、快速路、普通公路的连续流交通设施,其获取的数据目前主要服务于道路交通状态的监测与预测;
[0051]
感应式交通控制系统数据主要来源于布设于城市主次干道交叉口附近的车辆检测器,其获取的数据目前主要服务于实时自适应信号控制;
[0052]
道路收费系统数据主要来源于高速公路收费系统,其获取的数据目前主要服务于高速公路收费管理;
[0053]
车辆跟踪定位系统数据主要来源于车辆跟踪调度系统,其获取的数据目前主要服务于对城市内的出租车、私家车、公交车、勤务车以及城市之间的物流车、危险品运输车、长途客车的跟踪调度。
[0054]
需要补充的是,车辆检测器属于独立采集系统,主要方式包括:
[0055]
磁频检测:依据电磁感应原理,在检测器内通过的电流会由于车辆通过检测区域而发生突变上升,当该电流达到设定值时,将会启动记录仪,记录仪将会检测通过的交通量和时间;最主要的检测仪器为环形线圈检测器,环形线圈检测器埋设在路面下,当车辆通过时会引起线圈磁场变化,据此检测器可计算出车流流量、占有率,车辆速度可以利用环形线圈的平均有效长度进行计算,而如要获取准确的速度数值可采用间距约为6m的两组线圈直接进行测量;
[0056]
波频检测:发射微波一直到达检测路面,但是最后将被反射回来,再进行微波检测,完成对车辆行驶速度、车辆长度、交通流量、车道车辆占有率等多种交通信息的采集
[0057]
视频检测:基于视频影像设备对车辆状态进行检测。
[0058]
交通信息获取还可以通过协同采集系统,协同采集系统主要包括:基于gps定位的采集、基于射频rfid的采集、基于蜂窝网络的采集,这种采集方式可提供车辆编号、车牌、精度、纬度、瞬时速度、方向角等信息。
[0059]
作为本发明的进一步优选,步骤三中的交通状态参数包括但不限于:交通流量、地点速度、时间占有率、车头时距、区间速度、行程时间、车辆密度、排队长度。
[0060]
需要补充的是,交通流量的计算公式为:
[0061][0062]
为实际采样间隔i内单位时间的平均交通流量;
[0063]qi,s
为实际采样间隔i内的总流量;
[0064]ci,s
为实际采样间隔i的时长。
[0065]
需要补充的是,车头时距的算公式为:
[0066]hj,x
为虚拟采样间隔j的平均车头时距;
[0067]hj,s
为实际采样间隔j的平均车头时距;
[0068]
为实际采样间隔i内单位时间的平均交通流量;
[0069]
作为本发明的进一步优选,步骤二和步骤三中的aid算法的计算公式为:
[0070][0071][0072][0073]ip
(t)为第t个时间间隔车辆检测器p的交通参数组合变量;
[0074]qp
(t)为第t个时间间隔车辆检测器p的交通流量;
[0075]hp
(t)为第t个时间间隔车辆检测器p的平均车头时距;
[0076]
n为数据分析的时间窗口宽度;
[0077]
和分别为q
p
(t)和h
p
(t)的预测值。
[0078]
作为本发明的进一步优选,数据分析的时间窗口宽度n的取值对交通事件检测效果具有较大影响,n值太大,使得时间窗口内交通数据较为平均,有可能造成交通事件的漏检;n值太小,交通数据的正常波动也可能误检为发生交通事件,在实际应用时,应以获取最佳的交通事件检测效果为原则确定n的取值,一般为5-10。
[0079]
作为本发明的进一步优选,i
p
(t)值在交通事件发生前、交通事件持续过程中以及交通事件处理完毕后的变化具有趋势性,具体表现为:
[0080]
(1)当没有交通事件发生时,车辆检测器获取的交通参数数据一般较为平稳或者具有渐变趋势,各交通参数数据的实测值与预测值通常比较接近,此时i
p
(t)值会在“1”附近波动;
[0081]
(2)在交通事件发生初期,如果其对交通流的运行产生了比较大的影响,车辆检测器获取的交通参数实测值将会产生突变,交通参数预测值则会在一段时间内维持没有发生交通事件时的发展趋势,此时i
p
(t)值将会显著增加并持续远大于“1”,当其取值超过特定的阈值时,则可认为该车辆检测器的上游发生了交通事件;
[0082]
(3)当交通事件处于持续阶段时,尽管交通流的运行处于受干扰状况,但能够通过事发位置的车辆数已基本趋于稳定,因此下游车辆检测器所获取的交通参数实测值也将逐渐趋于稳定,此时段交通参数预测值会从事件发生初期与实测值差别较大变为接近实测值,i
p
(t)值将会表现为迅速下降直至在“1”附近波动;
[0083]
(4)当交通事件处于结束阶段时,如果交通事件对交通流的影响已基本消除,车辆检测器获取的交通参数实测值将会向反方向发展,交通参数预测值的变化则会经历从维持交通事件持续阶段的发展趋势到逐渐接近其实测值,同样i
p
(t)值的变化将经历从“1”附近开始迅速变小到最终在“1”附近波动,当i
p
(t)取值低于特定的阈值时,可以认为交通事件的影响已经结束。
[0084]
需要补充的是,还可以基于snd算法并利用交通参数的正态偏差扑捉交通事件对交通流运行的不利影响,snd算法的计算公式为:
[0085][0086][0087][0088]
p为收费站编号;n为数据分析的时间窗口宽度,一般取3-10;
[0089]
为收费站p第i个采样间隔交通流量的预测值;
[0090]
sd为数据分析时间窗口内交通流量的标准差;
[0091]
snd
p
(i)为收费站p第i个采样间隔交通流量的正态偏差;
[0092]
当snd
p
(i)小于预先设定的阈值k1时,则可认为收费站p上游路段发生了异常交通状,上述snd算法只利用了交通参数数据横向时间序列。
[0093]
为了能够有效区分常发性交通拥挤和交通事件状态,还需进一步利用交通流量纵向时间序列数据计算,计算公式为:
[0094][0095][0096][0097]
r为纵向时间序列数据分析的时间窗口宽度,一般取3-8;
[0098]
为收费站p第t个采样间隔交通流量的纵向时间序列预测值;
[0099]
sd为纵向时间序列数据分析时间窗口内交通流量的标准差;
[0100]
snd
p
(t)为收费站p第t个采样间隔交通流量的纵向时间序列正态偏差;
[0101]
当snd
p
(t)小于预先设定的阈值k2时,则认为发生了异常交通状态,否则为常发性交通拥挤状态。
[0102]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1