一种电子内窥镜系统校准装置及校准方法与流程
1.本发明涉及一种电子内窥镜系统校准装置及校准方法,属于医疗器械计量检测技术领域。
背景技术:
2.电子内窥镜的工作原理是以光电耦合原件ccd采集人体器官图像,将图像转换为电信号,经电缆传输线传递给图像处理器,图像处理器再还原为光信号,这些光信号在显示器上还原为人体器官图像,医护人员可选择记录并打印出这些图像。
3.整套电子内窥镜系统主要由内镜(endoscopy) 、电视信息系统中心(video information system center) 和电视监视器(television monitor) 三个主要部分组成。从详细部件构成上,电子内窥镜主要包括先端弯曲部、插入部、操作部、电气接头部。电子内窥镜按照人体器官的种类可分为上消化道内窥镜、电子支气管镜、大肠内窥镜、结肠镜、胰腺镜、电子食道镜等。
4.现行的电子内窥镜相关标准规范有很多版本,然而电子内窥镜的校准方法主要还是通过人工进行检测,存在操作复杂、测量周期长、测量精度难以保障、重复性查等问题,多用于电子内窥镜的出厂鉴定,不适用于医院、计量院所等机构的常规测量维护,导致大多的医疗检测单位无法开展有关电子内窥镜的计量检测工作,也缺乏对电子内窥镜的定期检测维护措施。
技术实现要素:
5.发明目的:针对现有技术所存在的问题,本发明提供一种电子内窥镜系统校准装置及校准方法,适用于医用电子内窥镜的质量检测,装置具有结构简单、操作方便、测量精度高等特点,能够满足电子内窥镜系统综合多参数的测试需求,为电子内窥镜的计量校准提供可靠的技术支持。
6.技术方案:为实现上述目的,本发明提供一种电子内窥镜系统校准装置,包括前端支架、镜体支架、成像支架、测标单元、工业相机及电控单元,其中镜体支架用于实现电子内窥镜镜体的支撑固定,测标单元包括静态测标单元及动态测标单元,前端支架用于实现测标单元的位姿调整,成像支架用于实现工业相机的位姿调整,工业相机用于采集电子内窥镜显示系统的显示图像,电控单元用于实现前端支架、成像支架的驱动控制以及动态测标单元的成像控制,并根据工业相机采集的图像进行测量校准。
7.进一步的,所述静态测标单元包括一系列静态测标卡,且静态测标卡采用电子束直写技术在石英玻璃材料上直接加工而成,其分辨率范围为1~100 lp/mm,最小加工尺寸(线宽)为5μm,加工精度为
±
2μm,用于对电子内窥镜系统的畸变、视场角、景深、分辨率、色彩还原能力及综合光效参数等展开测试。
8.进一步的,所述静态测标卡上设有led背景板,其与电控单元电连接,用于实现亮度调节。
9.进一步的,所述动态测标单元采用分辨率高于2k的超高清显示屏,用于对电子内窥镜系统的空间频率响应、亮度响应特性、动态范围等参数展开测试。
10.进一步的,所述前端支架包括x轴调节机构、y轴调节机构、z轴调节机构、旋转平台及测标支架,其中测标支架用于实现测标单元的安装固定,x轴调节机构、y轴调节机构、z轴调节机构分别用于实现测标支架沿x、y、z轴三个方向的位移调整,旋转平台用于实现测标支架在水平面内的转动调整。
11.其中y轴调节机构和z轴调节机构用于实现测标单元中心在电子内窥镜视场内的调整,x轴调节机构用于实现测标单元在电子内窥镜显示系统上的成像清晰度调整。此外,在试验过程中也需要进行空间坐标x、y、z三轴调整,以获取相应的测试参数,同时为了测量电子镜先端弯曲部弯转后图像获取能力,需要通过旋转平台对测标角度进行调整。
12.进一步的,所述x轴调节机构、y轴调节机构均包括由伺服电机实现位移驱动的丝杆模组,所述旋转平台包括由伺服电机实现旋转驱动的旋转臂,所述z轴调节机构包括位于旋转臂末端的z轴支架,所述测标支架与z轴支架之间滑动配合,且两者的配合面上均设有条形齿,通过测标支架与z轴支架之间的螺栓紧固实现滑动锁定。
13.进一步的,所述成像支架包括移动小车平台及安装于移动小车平台上的多轴机械臂,通过多轴机械臂实现工业相机相对于内窥镜显示系统的位姿调整。
14.进一步的,所述电控单元包括计算机、控制器,且控制器包括控制板、伺服驱动器、微型处理器,所述控制板用于接收计算机的控制指令,并通过伺服驱动器实现前端支架的驱动控制,所述计算机通过微型处理器连接动态测标单元,从而展示设定的动态测标视频,所述计算机分别与工业相机和多轴机械臂信号连接,用于实现多轴机械臂的驱动控制,并获取工业相机采集的图像。
15.此外,还有一种基于上述电子内窥镜系统校准装置的校准方法,包括以下步骤:a、电子内窥镜安装:将电子内窥镜镜体安装于镜体支架上,并通过成像支架调整工业相机的初始位置和角度,使得电子内窥镜显示系统在工业相机的视距范围内清晰显示;b、动态测标试验:b1、将动态测标单元安装于前端支架上,并通过前端支架调整动态测标单元的初始位置和角度,使得动态测标单元的成像中心与电子内窥镜镜体的视场中心重合,且电子内窥镜显示系统上的图像达到最清晰状态;b2、通过电控单元控制动态测标单元展示设定的动态测标视频,进而根据工业相机采集的图像进行测量校准;c、静态测标试验:将静态测标单元安装在前端支架上,并通过前端支架调整静态测标单元的初始位置和角度,使得静态测标单元中心与电子内窥镜镜体的视场中心重合,且电子内窥镜显示系统上的图像达到最清晰状态,进而根据工业相机采集的图像进行测量校准。
16.进一步的,所述步骤a中在安装电子内窥镜镜体后,进一步对先端弯曲部进行拉直或弯转处理,由此评估电子内窥镜先端弯曲部弯转后的成像能力变化。
17.有益效果:与现有技术相比,本发明提供的一种电子内窥镜系统校准装置及校准方法,具有以下优点:
1、通过一系列标准静态测标卡对电子内窥镜系统的光学成像能力、显示功能和机械功能进行高效测试,全面评价电子内窥镜系统的性能指标,充分满足电子内窥镜系统综合多参数的测试需求;2、通过动态测标单元对电子内窥镜系统的显示系统进行高效检测,即通过超高清显示屏的动态输出效果对电子内窥镜显示系统的空间频率响应、亮度响应特性、亮度宽容度、动态响应范围等参数展开全面测试,填补了国内相关领域的空白;3、装置自动化程度高,有效保证了测量精度,同时具有小型化、便携化的特点,便于现场检测工作的开展。
附图说明
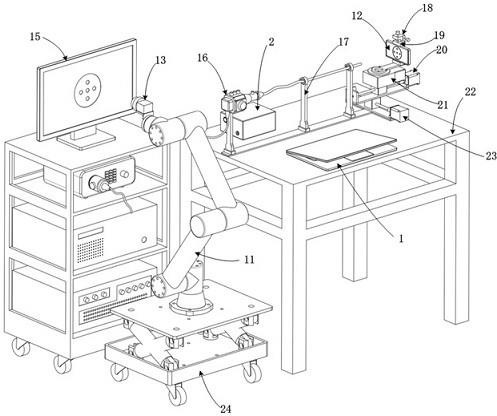
18.图1为本发明实施例中校准装置的整体结构示意图;图2为本发明实施例中校准装置的局部结构放大图;图3为本发明实施例中校准装置的电气结构图;图4为本发明实施例中z轴调节机构的结构示意图;图5为本发明实施例中进行视场角测量的原理图;图6为本发明实施例中进行空间频率响应测量的测试状态图;图7为本发明实施例中先端弯曲部弯转后进行畸变性能测量的测试状态图;图中包括:1、计算机,2、控制器,3、控制板,4、第一伺服驱动器,5、第二伺服驱动器,6、第三伺服驱动器,7、微型处理器,8、第一伺服电机,9、第二伺服电机,10、第三伺服电机,11、五轴机械臂,12、静态测标卡,13、工业相机,14、动态测标单元,15、电子内窥镜显示系统,16、电子内窥镜镜体,17、镜体支架,18、z轴调节机构,19、测标支架,20、x轴调节机构,21、旋转平台,22、测试平台,23、y轴调节机构,24、移动小车平台,181、z轴支架,182、锁紧螺栓,183、条形齿,191、锁紧螺杆,192、锁紧块。
具体实施方式
19.下面将结合附图对本发明的优选实施方式进行描述,更加清楚、完整地阐述本发明的技术方案。
20.如图1、2所示为一种电子内窥镜系统校准装置,主要包括以下结构:静态测标单元:主要针对光学成像能力有关参数的测试需求,体现电子内窥镜系统对微小病灶(尺寸、形态)的分辨能力,且测标表面不可反光,测标的加工属于超高精度加工范畴,最小加工尺寸达到5μm宽度。
21.动态测标单元:用于电子内窥镜系统动态响应能力的检测,电子内窥镜系统在使用过程中,人体内部并不是一个静止状态,人体呼吸、肠胃的蠕动、心脏的跳动都影响着图像显示,响应慢的系统可能会丢失关键的图像信息,错过对病灶的诊断和治疗。
22.测试支架单元:包括前端支架、镜体支架和成像支架,镜体支架用于支撑和固定电子内窥镜镜体(尤其是先端弯曲部以及插入部),前端支架用于实现测标单元的位移及转动控制,成像支架用于实现工业相机的位姿调整,以获取电子内窥镜显示系统上不同位置或距离的图像。
23.电控单元:控制整个装置的自动化操作,包括动态测标单元的成像控制、测试支架
的驱动控制以及根据工业相机采集的图像进行测量校准等。
24.进一步的,静态测标单元包括一系列静态测标卡,静态测标卡采用电子束直写技术在石英玻璃材料上直接加工而成,其分辨率范围为1~100 lp/mm,最小尺寸(线宽)为5μm,加工精度为
±
2μm,用于对电子内窥镜系统的畸变、视场角、景深、分辨率、色彩还原能力及综合光效参数等展开测试。
25.进一步的,静态测标卡上设有led背景板,用于实现亮度调节。
26.进一步的,动态测标单元采用分辨率高于2k的超高清显示屏,基于树莓派技术,用于对电子内窥镜系统的空间频率响应、亮度响应特性、动态范围等参数展开测试。
27.进一步的,前端支架包括x轴调节机构、y轴调节机构、z轴调节机构、旋转平台及测标支架,其中测标支架用于实现测标单元的安装固定,x轴调节机构、y轴调节机构、z轴调节机构分别用于实现测标支架沿x、y、z轴三个方向的位移调整,旋转平台用于实现测标支架在水平面内的转动调整。
28.其中y轴调节机构和z轴调节机构用于实现测标单元中心在电子内窥镜视场内的调整,x轴调节机构用于实现测标单元在电子内窥镜显示系统上的成像清晰度调整。此外,在试验过程中也需要进行空间坐标x、y、z三轴调整,以获取相应的测试参数,同时为了测量电子镜先端弯曲部弯转后图像获取能力,需要通过旋转平台对测标角度进行调整。
29.进一步的,x轴调节机构采用由第一伺服电机实现驱动的丝杆模组,y轴调节机构采用由第二伺服电机实现驱动的丝杆模组,旋转平台采用由第三伺服电机实现驱动的旋转臂。如图4所示,z轴调节机构包括位于旋转臂末端的z轴支架,测标支架通过滑块与z轴支架之间滑动配合,两者的配合面上均设有条形齿,测标支架与z轴支架之间设有锁紧螺栓,松开锁紧螺栓后通过条形齿配合实现上下滑动调整,而后通过螺栓紧固实现滑动锁定,由此实现z轴方向的位移调整。
30.进一步的,测标支架的顶部穿设有螺纹连接的锁紧螺杆,且锁紧螺杆的底部连接有锁紧块,通过转动锁紧螺杆带动锁紧块向下移动实现测标单元的压紧固定。
31.进一步的,成像支架包括移动小车平台及安装于移动小车平台上的五轴机械臂,应用工业相机获取显示系统的图像时,通过五轴机械臂对工业相机进行位姿调整,以获取显示系统上不同位置或不同距离的图像。
32.如图3所示,电控单元主要包括计算机、控制器,控制器包括控制板、伺服驱动器、微型处理器(本实施例中采用树莓派),控制板用于接收计算机的控制指令,并分别通过第一伺服驱动器、第二伺服驱动器、第三伺服驱动器实现第一伺服电机、第二伺服电机、第三伺服电机的驱动控制,由此实现精准定位,同时通过输出电流大小控制静态测标卡上的led背景板亮度;计算机通过微型处理器连接动态测标单元,从而展示设定的动态测标视频;计算机通过网口连接工业相机和多轴机械臂,用于实现多轴机械臂的驱动控制,并获取工业相机采集的图像。
33.此外,基于上述电子内窥镜系统校准装置的校准方法包括以下步骤:a、电子内窥镜安装:将电子内窥镜镜体安装于镜体支架上,并通过成像支架调整工业相机的初始位置和角度,使得电子内窥镜显示系统在工业相机的视距范围内清晰显示;b、动态测标试验:
b1、将动态测标单元安装于前端支架上,并通过前端支架调整动态测标单元的初始位置和角度,使得动态测标单元的成像中心与电子内窥镜镜体的视场中心重合,且电子内窥镜显示系统上的图像达到最清晰状态;b2、通过电控单元控制动态测标单元展示设定的动态测标视频,进而根据工业相机采集的图像进行测量校准;c、静态测标试验:将静态测标单元安装在前端支架上,并通过前端支架调整静态测标单元的初始位置和角度,使得静态测标单元中心与电子内窥镜镜体的视场中心重合,且电子内窥镜显示系统上的图像达到最清晰状态,进而根据工业相机采集的图像进行测量校准。
34.其中静态测标试验包括:1)畸变校准:内窥镜成像系统视轴中和外围放大倍数不一致,会导致图像产生几何失真。如图1所示,电子内窥镜的畸变校准是在视场内(静态标准测试卡上)设置5个直径一致的实心圆(包括中心1个及四周均匀分布的4个),从显示系统获取图像,通过周围圆ri(i表示四个不同方向)和中心圆直径r的对比体现电子内窥镜发生的畸变,畸变率的计算公式为: 。2)视场角:电子内窥镜末端中心对物方最大视场高度的张角,表征视场范围的角度。如图5所示,电子内窥镜的视场角校准是在视场内(静态标准测试卡上)设置两个同心圆,其中大圆半径为r1,小圆半径为r2,确保视场的中心与同心圆的圆心同轴,初始状态为电子镜视场与大圆外圆重合,通过x轴调节机构进行轴向移动,使得电子镜视场与小圆外圆重合,移动的距离为l,即可得到电子镜视场大小:。
35.动态测标试验包括:1)空间频率响应测量:如图6所示,将动态测标单元的图像设置为一个圆型图标,图标以一定频率进行黑、白颜色切换,从显示系统获取图像,驱动测标的切换频率增加,直至无法分辨为止,这个切换频率为空间频率响应。
36.2)亮度响应特性测量:改变动态测标单元的图像为亮度响应图像,图像为可充满整个视场的背景b和小灰阶a构成,小灰阶a为亮度可独立变化的图标,采用10bit来表达灰度层级,灰阶变化范围0~1024,从显示系统获取图像,驱动测标显示灰度逐步增加,直至无法分辨为止,这一灰度值为电子内镜的响应范围。
37.如图7所示,为了评估电子内窥镜先端弯曲部弯转后成像能力的变化,手动控制电子镜转向,调节测标位置,将旋转平台转动设定的角度,使视场的中心轴与测标轴重新同轴,重复上述图像测量过程,查看成像能力的变化。
38.本发明以电子束直写光刻技术加工得到低至5μm线宽的静态测标卡,基于树莓派技术形成动态测标,最后采用高清高速的工业相机进行图像识别,结合图像处理对测试支架进行闭环控制,充分满足医用电子内窥镜相关标准的测试要求,为电子内窥镜的计量校准提供可靠的技术支持。
39.上述具体实施方式仅仅对本发明的优选实施方式进行描述,而并非对本发明的保护范围进行限定。在不脱离本发明设计构思和精神范畴的前提下,本领域的普通技术人员根据本发明所提供的文字描述、附图对本发明的技术方案所作出的各种变形、替代和改进,均应属于本发明的保护范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1