基于平行一维道路场景下的人员定位系统及定位方法与流程
1.本发明属于电子安防技术领域,尤其涉及一种基于平行一维道路场景下的人员定位系统及定位方法。
背景技术:
2.随着5g和物联网的快速发展,人们对高精度的位置需求日益增强,在室外环境中全球卫星定位导航系统已经日渐趋于完善和成熟,但是在室内环境中由于建筑物遮挡等因素,全球卫星定位导航系统难以满足人们对高精度的位置需求,因此如何提高室内环境的位置服务质量受到了人们的广泛关注。超宽带(ultra-wide band,uwb)定位技术因为其功耗低、时间分辨率高、抗多径能力和穿透能力强等特点在室内定位技术中脱颖而出。
3.但是在复杂环境下如(变电站)这种,对工作人员进行精准定位比较困难。在复杂环境下整体利用uwb定位系统进行二维定位时信号容易受到变电站设备的干扰,测量精度受到较大影响,造成工作人员的位置解算误差较大,而且所需定位基站数目较多,且难以满足实际变电站人员定位的使用需求。
4.现有技术中,只采用视觉定位即“单目相机定位”,受环境影响大,当环境昏暗时或者人与人相互遮挡时,易造成定位结果误判;只采用uwb定位系统对变电站整体环境下进行定位,由于变电站环境复杂,尤其是都是带有静电的庞大的金属设备,对uwb信号造成很大干扰,存在较大的定位误差。
技术实现要素:
5.本发明要解决的技术问题是,提供一种基于平行一维道路场景下的人员定位系统,将uwb定位系统的二维定位转化为多区域一维联合定位,尽量减少障碍物对定位系统的影响,提升系统的定位精度,实现在复杂场景下精准定位道路上人员位置和轨迹。
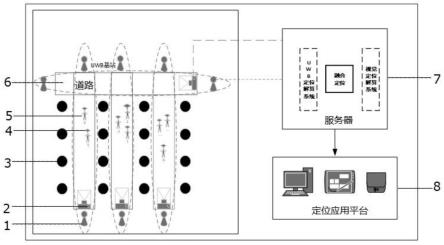
6.为了解决上述技术问题,本发明采用的技术方案是:该基于平行一维道路场景下的人员定位系统,包括若干个单目相机、若干个uwb基站、若干个定位标签、服务器和定位应用平台;所述单目相机和所述uwb基站均与所述服务器形成数据连接,所述定位标签与所述uwb基站形成数据连接;所述服务器与所述定位应用平台形成数据连接;所述单目相机布设在道路的边缘,用于检测该道路上的图像信息并将获得的图像信息传输给所述服务器;所述uwb基站布设在道路的两侧边缘,用于接收定位标签的信号并向所述服务器传输定位标签的信号;所述服务器用于分析并处理图像信息和定位标签的信号,从而获得定位信息。
7.作为本发明的优选技术方案,所述服务器包括视觉定位解算系统、uwb定位解算系统和定位解算引擎,所述视觉定位解算系统用于分析和处理图像信息,所述uwb定位解算系统用于分析和处理定位标签的信号;所述定位解算引擎用于匹配并融合视觉定位解算系统和uwb定位解算系统的解算结果,获得人员的运动轨迹。
8.作为本发明的优选技术方案,所述定位应用平台包括pc端或/和移动端。
9.作为本发明的优选技术方案,所述uwb基站和所述单目相机均通过通讯模块与所
述服务器形成通信连接,向所述服务器传输数据或信号。通讯模块通过有线或者无线的方式进行传输数据或信号。
10.本发明还要解决的技术问题是,提供一种基于平行一维道路场景下的人员定位方法,将uwb定位系统的二维定位转化为多区域一维联合定位,尽量减少障碍物对定位系统的影响,提升系统的定位精度,实现在复杂场景下精准定位道路上人员位置和轨迹。
11.为了解决上述技术问题,本发明采用的技术方案是:该基于平行一维道路场景下的人员定位的方法,具体包括以下步骤:
12.s1:在每一条道路上,采用一个单目相机实时检测道路上人员的图像信息,并将图像信息传输到服务器进行图像信息解算,获得人员的位置解算结果;
13.s2:在每一条道路上,采用两个uwb定位基站将接收到定位标签信号信息传输到服务器进行标签位置解算,获得携带定位标签的人员在道路上的一维位置解算结果;
14.s3:定位解算引擎对人员的位置解算结果和一维位置解算结果进行匹配,解算出人员的运动轨迹。
15.作为本发明的优选技术方案,还包括步骤s4:服务器将定位引擎解算出的人员运动轨迹,传输到定位应用平台(pc端、移动端等),从而在所述定位应用平台实时对道路上人员进行监控追踪。
16.作为本发明的优选技术方案,所述步骤s1中服务器通过视觉定位解算系统进行图像信息解算,具体包括以下步骤:
17.s11:接收单目相机传输的每帧图像;
18.s12:先使用yolov5单目相机物体检测模型,通过训练使其成为人员专用检测器;
19.s13:添加边界框,然后选取参考点利用自修正俯仰角和偏航角的相似三角形测距算法,实现对人员位置解算,获得人员位置解算结果。
20.作为本发明的优选技术方案,所述步骤s13具体包括以下步骤:
21.s131:设定单目相机高度h,垂直落脚点坐标(xc,yc),单目相机中心坐标(uc,vc),单目相机的焦距坐标f,单目相机的外参{pitch,yaw};单目相机的光心o点,其垂直投影到光轴上的点o
″
;行人实际位置为c点,并垂直投影在光轴上a点,d
′
为a点到光轴投影点o
″
的距离;ac为行人实际位置到光轴的投影距离k
′
,δ为yaw角的偏差值;从而解算输出道路上人员到单目相机中心的垂直距离d,人员到单目相机中心的水平横向距离k;
22.s132:计算落脚点的像素高度h=|xc-uc|,像素宽度w=|yc-vc|;
23.已知o
″
a=d
′
,yaw=δ,d=d
′
*cosδ,k=d
′
*sinδ,ac=k
′
;且假设已知测量得到距离值d
′
,k
′
以及角度值δ,从而得到最终定位公式:
[0024][0025]
[0026][0027][0028]
最终解算的相对单目相机的人员坐标(d,k);
[0029]
其中,h计算检测到像素框的高度,也是行人在图像中的高度,w为像素框的宽度;单目相机的光心o,其垂直投影在地面上的点o";行人实际位置c点,并垂直投影在光轴上a点,d'为a点到光轴投影点o"的距离;ac为行人实际位置到光轴的投影距离k'。
[0030]
作为本发明的优选技术方案,所述步骤s2中服务器通过的uwb定位解算系统进行标签位置解算,uwb定位解算系统将接收到的uwb数据信息通过tdoa或tof定位算法对携带定位标签的人员进行一维定位坐标解算,获得一维定位坐标解算结果。
[0031]
作为本发明的优选技术方案,所述步骤s3中定位解算引擎采用最长公共子序列(lcss)匹配算法对视觉定位解算系统解算的人员位置坐标轨迹和uwb定位解算系统解算的人员位置坐标轨迹进行匹配,再融合人员位置解算结果和一维定位坐标解算结果,解算出人员的运动轨迹;具体包括以下步骤:
[0032]
s31:视觉定位解算系统解算出m个人在t个时刻的位置坐标集合c;c={c
11
,c
12
,c
13
…c1t
;c
12
,c
22
,c
23
…c2t
;c
m1
,c
m2
,c
m3
…cmt
},c
11
为1号人员的单次位置坐标,即c
1t
是利用视觉定位解算系统解算的1号人员在第t个时刻的位置坐标;
[0033]
s32:uwb定位解算系统解算出n个定位标签,在t个时刻位置坐标集合为u,记为u={u
11
,u
12
,u
13
…u1t
;u
12
,u
22
,u
23
…u2t
;u
n1
,u
n2
,u
n3
…unt
},每一个坐标元素,即u
nt
是利用uwb定位解算系统解算的编号为n的定位标签在第t个时刻的位置坐标,
[0034]
s33:设定阈值ε,若当|c
14-u
14
|《ε,|c
16-u
16
|《ε时,则判断为人员和定位标签匹配成功,其坐标位置记为z
11
={(c
14
,u
14
),(c
16
,u
16
)},序列z为定位标签和人员所有匹配成功的集合;其中记为:z={z
11
,z
12
,
…z1m
;...z
mn
};
[0035]
若z
1k
是c
1t
和u
kt
匹配集合,为其最长的公共子序列z
1k
的长度s[1,k]为s[1,:]最大值,即编号1的人员与定位标签编号为k的定位标签为同一运动轨迹,即定位标签被佩戴在该人员的身上,然后利用两者坐标得出1号人员准确坐标
[0036]
s34:同理将m个人员,n个定位标签集合为z最长的子序列其长度为s[m,n],其计算公式为:
[0037][0038]
假设s[3,6]为s[3,:]最大,则说明最长公共子序列为z
36
,为3号人员和6号定位标签为同一轨迹,即定位标签被佩戴在该人员的身上,3号人员的改进后运动轨迹坐标
同理可得其他人员坐标o=[o1…
om]。
[0039]
与现有技术相比,本发明具有的有益效果为:(1)将复杂环境下的二维定位转化为多区域一维定位,尽量减少障碍物对定位系统的影响,利用两个uwb定位基站和单目相机的平行一维融合定位,既可以解决单目相机在光线昏暗和遮挡时的不足,又可以解决两个uwb基站进行一维定位时位置偏移的问题,实现对道路上的人员进行精准定位;(2)提出了一种单目相机定位算法,采用自修正俯仰角和偏航角的相似三角形测距算法,此算法对单目相机的安装要求更低,并且更加全面地考虑了相机姿态角,减小了由相机安装姿态误差导致定位误差;(3)提出了一种视觉定位系统解算的定位轨迹坐标和uwb定位系统解算的轨迹坐标的互相匹配算法最长公共子序列匹配算法。通过采用最长公共子序列(lcss)进行匹配,提升uwb和视觉定位两种定位结果匹配的准确度,提升融合定位系统的精度。
附图说明
[0040]
下面结合附图进一步描述本发明的技术方案:
[0041]
图1是本发明的基于平行一维道路场景下的人员定位系统的结构图;
[0042]
其中:1-uwb基站;2-单目相机;3-建筑设备;4-定位标签;5-人员;6-道路;7-服务器;8-定位应用平台;
[0043]
图2是本发明的基于平行一维道路场景下的人员的定位方法的流程图;
[0044]
图3是本发明的基于平行一维道路场景下的人员的定位方法中的视觉定位解算的流程图;
[0045]
图4是本发明的基于平行一维道路场景下的人员的定位方法中的视觉定位解算中自修正俯仰角和偏航角的相似三角形测距示意图;
[0046]
图5是本发明的基于平行一维道路场景下的人员的定位方法中uwb平行一维定位存在位置漂移示意图。
具体实施方式
[0047]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0048]
实施例:如图1所示,该基于平行一维道路场景下的人员定位系统,包括若干个单目相机2、若干个uwb基站1、若干个定位标签4、服务器7和8定位应用平台;所述单目相机2和所述uwb基站1均与所述服务器7形成数据连接,所述定位标签4与所述uwb基站1形成数据连接;定位标签4安装在定位终端上(如腕带手表,头盔等),这些定位终端由人员携戴在身上;定位标签4可实时与uwb定位基站1通信进行实时定位;所述服务器7与所述定位应用平台8形成数据连接;所述单目相机2布设在道路6的边缘,用于检测该道路6上的图像信息并将获得的图像信息传输给所述服务器7;所述uwb基站1布设在道路6的两侧边缘,用于接收定位标签4的信号并向所述服务器7传输定位标签4的信号;所述服务器7用于分析并处理图像信息和定位标签4的信号,从而获得定位信息;所述服务器7包括视觉定位解算系统、uwb定位解算系统和定位解算引擎,所述视觉定位解算系统用于分析和处理图像信息,所述uwb定位
解算系统用于分析和处理定位标签的信号;所述定位解算引擎用于匹配并融合视觉定位解算系统和uwb定位解算系统的解算结果,获得人员5的运动轨迹;所述定位应用平台8包括pc端或/和移动端;所述uwb基站1和所述单目相机2均通过通讯模块与所述服务器7形成通信连接,向所述服务器7传输数据或信号,其中通讯模块通过有线或者无线的方式进行传输数据或信号。
[0049]
如图2-5所示,该基于平行一维道路场景下的人员定位的方法,具体包括以下步骤:
[0050]
s1:在每一条道路上,采用一个单目相机2实时检测道路6上人员的图像信息,并将图像信息传输到服务器进行图像信息解算,获得人员5的位置解算结果;
[0051]
如图3所示,所述步骤s1中服务器通过视觉定位解算系统进行图像信息解算,具体包括以下步骤:
[0052]
s11:接收单目相机2传输的每帧图像;
[0053]
s12:先使用yolov5单目相机物体检测模型,通过训练使其成为人员5专用检测器;
[0054]
s13:添加边界框,然后选取参考点利用自修正俯仰角和偏航角的相似三角形测距算法,实现对人员5的位置解算,获得人员5的位置解算结果;
[0055]
如图4所示,所述步骤s13具体包括以下步骤:
[0056]
s131:设定单目相机高度h,垂直落脚点坐标(xc,yc),单目相机中心坐标(uc,vc),单目相机2的焦距坐标f,单目相机2的外参{pitch,yaw};从而解算输出道路上人员5到单目相机2中心的垂直距离d,人员5到单目相机2中心的水平横向距离k;
[0057]
s132:计算落脚点的像素高度h=|xc-uc|,像素宽度w=|yc-yc|;
[0058]
已知o
″
a=d
′
,yaw=δ,d=d
′
*cosδ,k=d
′
*sinδ;且假设已知yaw=δ,o
″
a=d
′
,ac=k
′
,从而得到最终定位公式:
[0059][0060][0061][0062][0063]
最终解算的相对单目相机2的人员5坐标(d,k);
[0064]
其中,h计算检测到像素框的高度,也是行人在图像中的高度,w为像素框的宽度;单目相机的光心o,其垂直投影在地面上的点o";行人实际位置c点,并垂直投影在光轴上a点,d'为a点到光轴投影点o"的距离;ac为行人实际位置到光轴的投影距离k';
[0065]
s2:在每一条道路上,采用两个uwb定位基站1将接收到定位标签4的信号信息传输
到服务器7进行标签位置解算,获得携带定位标签4的人员5的一维位置解算结果;所述步骤s2中服务器7通过的uwb定位解算系统进行标签位置解算,uwb定位解算系统将接收到的uwb数据信息通过tdoa或tof定位算法对携带定位标签4的人员5进行一维定位坐标解算,获得一维定位坐标解算结果;uwb定位解算系统通过接收到的uwb定位信息,对携带定位标签4的人员5进行一维定位,但是可能会出现定位漂移的问题,即一维定位会存在相互干扰的情况,即道路a上的点会被拉到道路b上如图5;定位标签在同一时刻发射信号,可能会同时被相邻的一对uwb定位基站1接收信号,此时点定位标签4会有多组解,但uwb定位解算系统也无法准确判断出是某个人携带的定位标签具体在哪一个条道路,所以如果只采用uwb定位系统会出位置漂移的问题;
[0066]
s3:定位解算引擎对人员5的位置解算结果和一维位置解算结果进行匹配,解算出人员的运动轨迹;
[0067]
所述步骤s3中定位解算引擎采用最长公共子序列(lcss)匹配算法对视觉定位解算系统解算的人员位置坐标轨迹和uwb定位解算系统解算的人员5的位置坐标轨迹进行匹配,再融合人员5的位置解算结果和一维定位坐标解算结果,解算出人员的运动轨迹;具体包括以下步骤:
[0068]
s31:视觉定位解算系统解算出m个人在t个时刻的位置坐标集合c;c={c
11
,c
12
,c
13
…c1t
;c
12
,c
22
,c
23
…c2t
;c
m1
,c
m2
,c
m3
…cmt
},c
11
为1号人员的单次位置坐标,即c
1t
是利用视觉定位解算系统解算的1号人员在第t个时刻的位置坐标;
[0069]
s32:uwb定位解算系统解算出n个定位标签,在t个时刻位置坐标集合为u,记为u={u
11
,u
12
,u
13
…u1t
;u
12
,u
22
,u
23
…u2t
;u
n1
,u
n2
,u
n3
…unt
},每一个坐标元素,即u
nt
是利用uwb定位解算系统解算的编号为n的定位标签在第t个时刻的位置坐标,
[0070]
s33:设定阈值ε,若当|c
14-u
14
|《ε,|c
16-u
16
|《ε时,则判断为人员和定位标签匹配成功,其坐标位置记为z
11
={(c
14
,u
14
),(c
16
,u
16
)},序列z为定位标签和人员所有匹配成功的集合;其中记为:z={z
11
,z
12
,
…z1m
;z
mn
};
[0071]
若z
1k
是c
1t
和u
kt
匹配集合,为其最长的公共子序列z
1k
的长度s[1,k]为s[1,:]最大值,即编号1的人员与定位标签编号为k的定位标签为同一运动轨迹,即定位标签被佩戴在该人员的身上,然后利用两者坐标得出1号人员准确坐标
[0072]
s34:同理将m个人员,n个定位标签集合为z最长的子序列其长度为s[m,n],其计算公式为:
[0073][0074]
假设s[3,6]为s[3,:]最大,则说明最长公共子序列为z
36
,为3号人员和6号定位标签为同一轨迹,即定位标签被佩戴在该人员的身上,3号人员的改进后运动轨迹坐标同理可得其他人员坐标o=[o1…
om];
[0075]
s4:服务器将定位引擎解算出的人员运动轨迹,传输到定位应用平台(pc端、移动端等),从而在所述定位应用平台实时对道路上人员进行监控追踪。
[0076]
本发明利用两个uwb定位基站和单目相机进行平行一维融合定位,既解决单目相机在光线昏暗和遮挡时的不足,又解决两个uwb基站进行一维定位时位置偏移的问题,实现对道路上的行人进行精准定位,不但减少布设定位系统的成本,还提升了平行一维场景下人员的定位精度,社会效益巨大。
[0077]
对于本领域的普通技术人员而言,具体实施例只是对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1