偏心测量仪自动调焦方法与流程
1.本发明属于数字图像处理技术领域,具体涉及一种偏心测量仪自动调焦方法。
背景技术:
2.一般情况下,只有正焦图像才能够提供给人们更多丰富的信息,正焦图像更加清晰,而离焦图像显的模糊,不仅不能够提供有用信息,更加可能提供错误信息,造成误判,所以光学系统中调焦位置尤为重要,早期靠手动调焦,不仅效率低,还可能产生误差。
技术实现要素:
3.本发明要解决的技术问题是提供一种偏心测量仪自动调焦方法,该方法精度高,抗干扰性强,稳定性好。
4.为了解决上述技术问题,本发明的偏心测量仪自动调焦方法如下:
5.控制调焦机构按照设定的调焦步长运行,每运行一步采集图像信息并根据公式(1)计算图像调焦评价函数f;找到调焦评价函数最大值点,该点对应的调焦机构位置即为对焦位置;
[0006][0007]
其中α和β为加权系数,α+β=1;
[0008]
t1=f(x,y)
×
s0,t2=f(x,y)
×
s1,t3=f(x,y)
×
s2,t4=f(x,y)
×
s3,f(x,y)为图像像素,s0、s1、s2、s3为改进的sobel算子;
[0009][0010][0011]
进一步,本发明利用爬山法、曲线拟合调焦搜索法或者fibonacci调焦搜索法找到调焦评价函数最大值点。
[0012]
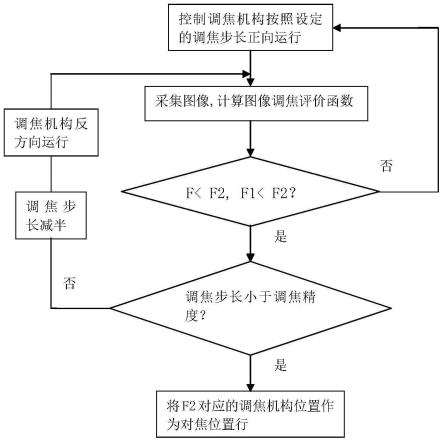
进一步,本发明还可以利用如下改进的爬山法找到调焦评价函数最大值点:调焦机构每按照设定的调焦步长正方向运行一步,将当前位置图像的调焦评价函数f与前两步图像的调焦评价函数f1、f2进行比较;如果f1《f2《f,则调焦机构沿着正方向继续运行,直至f《f2,f1《f2;判断调焦步长是否小于调焦精度,若大于调焦精度,则将调焦步长减至(1/3)d~(1/2)d,调焦机构沿反方向运行,直至f《f2,f1《f2;如此反复运行,直到调焦步长小于调焦精度且f《f2,f1《f2,将f2对应的调焦机构位置作为对焦位置。
[0013]
本发明采用改进的sobel算子计算调焦评价函数,边缘提取更平滑,减少了信息丢失,精度高,抗干扰性上,稳定性好;能够解决现有技术容易导致错误聚焦等问题。采用改进
的爬山法将当前位置的平均调焦评价函数与前两个步长的平均调焦评价函数进行比较,根据比较结果决定调焦机构正向运动或者方向运行,再根据调焦步长与所要求的调焦精度的关系判断是否调焦结束,最终找到调焦评价函数最大值点,具有运算速度快、灵敏度高的优点。
附图说明
[0014]
图1是偏心测量设备原理图。
[0015]
图2是本发明的流程图。
[0016]
图3.1是粗调焦状态下运动光学曲线图。
[0017]
图3.2是细调焦状态下运动光学曲线图。
具体实施方式
[0018]
下面结合附图和实施例对本发明作进一步详细说明,可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0019]
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义的理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况具体理解上述术语在本发明中的具体含义。
[0020]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或者仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”、“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0021]
在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或者位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0022]
如图1所示,偏心测量仪的自动调焦方法中涉及的装置包括镜头组1,调焦机构2,调焦镜组3,光源4,准直镜5,ccd相机6,反射镜7,被测镜组8,pc机9和聚焦镜头10;
[0023]
镜头组1中光源4发出的光经过准直镜5到达反射镜7再反射到调焦镜组3,pc机9通过控制调焦机构2控制调焦镜组的焦距,经过调焦镜组的光照射到聚焦镜头10再聚焦到被测镜组8镜面表面,经过被测镜组镜片表面的光反射光沿着中间的准直线到达ccd相机6,ccd相机6采集图像并将图像数字信号转送到pc机9进行处理。
[0024]
如图2所示,本发明的偏心测量仪自动调焦方法主要包括两部分:第一部分是调焦机构的自动运行,第二部分是图像调焦评价函数的计算,具体如下:
[0025]
设定调焦机构的调焦步长,调焦精度d=1mm;控制调焦机构按照设定的调焦步长
运行,每运行一步,采用ccd相机6采集图像并将图像数据传输给pc机,pc机计算图像调焦评价函数,利用爬山法、曲线拟合调焦搜索法或者fibonacci调焦搜索法找到图像调焦评价函数最大值点,该点对应的调焦机构位置即为对焦位置。本发明优选采用改进的爬山法找到图像调焦评价函数最大值点,与传统的爬山法、曲线拟合调焦搜索法或者fibonacci调焦搜索法相比,该方法不仅搜索效率高和搜索精度高,还有通用性。改进的爬山法如下:
[0026]
如图3.1、图3.2所示,调焦机构按照设定的初始调焦步长d=4mm沿z轴正方向运行,pc机将当前位置图像的调焦评价函数f与前两步图像的调焦评价函数f1、f2进行比较;如果f1《f2《f,则调焦机构沿着z轴正方向继续运行,直至f《f2,f1《f2;判断调焦步长是否小于调焦精度,若大于调焦精度d,则将调焦步长减半(调焦步长不限于减半,在(1/3)d~(1/2)d之间均可),调焦机构沿z轴反方向运行,直至f《f2,f1《f2;如此反复运行,直到调焦步长小于调焦精度d且f《f2,f1《f2,将f2对应的调焦机构位置作为对焦位置。
[0027]
利用原sobel算子s0和s1计算的调焦评价函数为sobel算子与图像进行卷积后t1=f(x,y)
×
s0,t2=f(x,y)
×
s1,f(x,y)为图像像素。
[0028]
原sobel算子s0和s1为水平和垂直方向:
[0029][0030]
采用原sobel算子只使用水平和垂直两个方向模板,忽视其它方向,并且抑制噪声能力差,因此本发明采用改进后的sobel算子计算得到调焦评价函数,具体如下:
[0031]
调焦机构每个位置采集图像的调焦评价函数f根据公式(1);
[0032][0033]
其中t1、t2、t3、t4为四个方向的边缘梯度值,α和β为加权系数,α+β=1;这里选择α=0.4和β=0.6;
[0034]
t1=f(x,y)
×
s0,t2=f(x,y)
×
s1,t3=f(x,y)
×
s2,t4=f(x,y)
×
s3,f(x,y)为图像像素;s0、s1、s2、s3为改进的sobel算子;
[0035]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1